
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
机器人视觉的卡尔曼滤波器:一项调查
陈顺义,IEEE高级成员
摘要:随着对机器人自动化的要求越来越高,卡尔曼滤波器受到了广泛的关注。本文简要介绍了近年来机器人视觉的最新研究进展。在影响机器人系统性能的诸多因素中,卡尔曼滤波器对视觉感知有着重要的贡献。卡尔曼滤波器解决了机器人定位、导航、跟踪、跟踪、运动控制、估计和预测、视觉伺服和操纵以及从一系列图像重构结构的不确定性。在成立50周年之际,我们注意到目前已经开发了20多种卡尔曼滤波器。这些包括扩展卡尔曼滤波器和无气味卡尔曼滤波器。在过去的30年里,大约有800篇出版物报道了这些滤波器在解决机器人视觉问题方面的能力。这些问题涉及到相当广泛的应用领域,如对象建模、机器人控制、目标跟踪、监视、搜索、识别和装配,以及机器人操作、定位、绘图、导航和探索。在本综述中对这些报告进行了总结,以便为实际解决方案提供合适的方法。代表性的贡献和未来的研究趋势也在一个抽象的层面上讨论。
索引词:计算机视觉、估计、卡尔曼滤波、局部化、粒子滤波、预测、机器人视觉。
I.我的介绍
阿尔曼滤波器已经成为一种标准的方法来减少误差在最小二乘意义上和在使用的测量来自不同的来源。在众多的应用中,卡尔曼滤波器基本上是机器人视觉发展的一部分。滤波器的目的是使用视觉测量,其中包含摄像机随时间捕获的噪声和不确定性。使用卡尔曼滤波器可以产生更接近机器人和目标的真实空间测量值,即机器人自主定位[1]和对象估计[2]
人工视觉定位是移动机器人的一个关键问题,尤其是在没有精确的全球定位系统(GPSs)和惯性传感器的环境中。在这些环境中,精确和高效的机器人定位不是一项简单的任务,因为提高精度通常会降低效率,反之亦然[3]。自动探测和跟踪也是导弹跟踪和安全系统等相关应用领域的研究热点
2010年12月30日收到的手稿;2011年4月25日修订;2011年7月11日接受。出版日期:2011年8月15日;当前版本日期2012年6月19日。这项工作得到了国家自然科学的部分支持,中国基金会根据60870002和61173096号,拨款设立浙江省自然科学基金资助项目R1110379。
作者来自浙江工业大学计算机科学与技术学院,杭州310023(邮箱:Sy@ ieee.org)。
本文中一个或多个图形的颜色版本可在http://ieeexplore.ieee.org上在线获取。
数字对象标识符10.1109/TIE.2011.2162714
作为虚拟现实接口、机器人视觉等商业领域中的视觉辅助导航,卡尔曼滤波器能够将视觉特征观测与来自GPS、惯性或力传感器的其他测量紧密结合。该滤波器以资源自适应和实时的方式准确估计地形相对位置和速度[4]–[6]。
基于视觉传感器的姿态估计在机器人应用中得到了广泛的应用。这种估计可以通过不同坐标的同构图和视觉摄像机的投影几何来进行。多传感器的测量集成正变得越来越具有吸引力,因为它的鲁棒性和灵活性[7]。对于自主机器人捕获非合作目标,其视觉系统需要采用卡尔曼滤波算法检测目标,确定锁定质量,预测运动[8]。对于鲁棒视觉跟踪控制,卡尔曼滤波器可以用来估计有趣的参数,并克服暂时的遮挡问题[9]。对于这类功能,使用无气味卡尔曼滤波器(UKF)融合来自不同传感器的信息。
二维图像的三维重建是解决机器人和计算机视觉中的问题的基础。基于视觉的无人飞行器的主要问题之一是通过对环境的分类、分割和识别,将移动机器人定位在室内、室外或非结构化环境中。当今机器人学中最活跃的话题之一是同步定位和地图平差(SLAM)[10],其中扩展卡尔曼滤波器(EKF)通常是机器人导航所必需的。EKF是卡尔曼滤波器的非线性版本。但由于计算复杂度高,对特征点的数目和稳定性有严格的限制。相比之下,传统方法选择一些角点或直线作为特征点[11],其中比例不变特征变换(SIFT)可以提高收敛速度。今天,卡尔曼滤波器在大多数自主机器人系统中发挥作用。
本文的研究范围仅限于机器人视觉领域中的卡尔曼滤波器。尽管这个话题早在20世纪80年代就吸引了研究人员[12],但这项调查集中了过去五年的贡献。任何对这一性质的评论都不可能引用已经发表的每一篇论文。因此,我们只包括我们认为具有代表性的重要作品样本和近年来的广泛趋势。在许多情况下,为更好地总结和区分关键思想和方法提供了参考。
本文还有六个部分。第二节简要概述了相关贡献。第三节介绍了机器人视觉的KF和EKF的典型公式。第四节列出了卡尔曼的相关任务、问题和应用过滤器。第五节集中讨论如何使用KF解决这些问题。我们展示了针对特定任务的可用方法和解决方案。第六部分讨论了我们对当前和未来趋势的看法。第七节是结论。
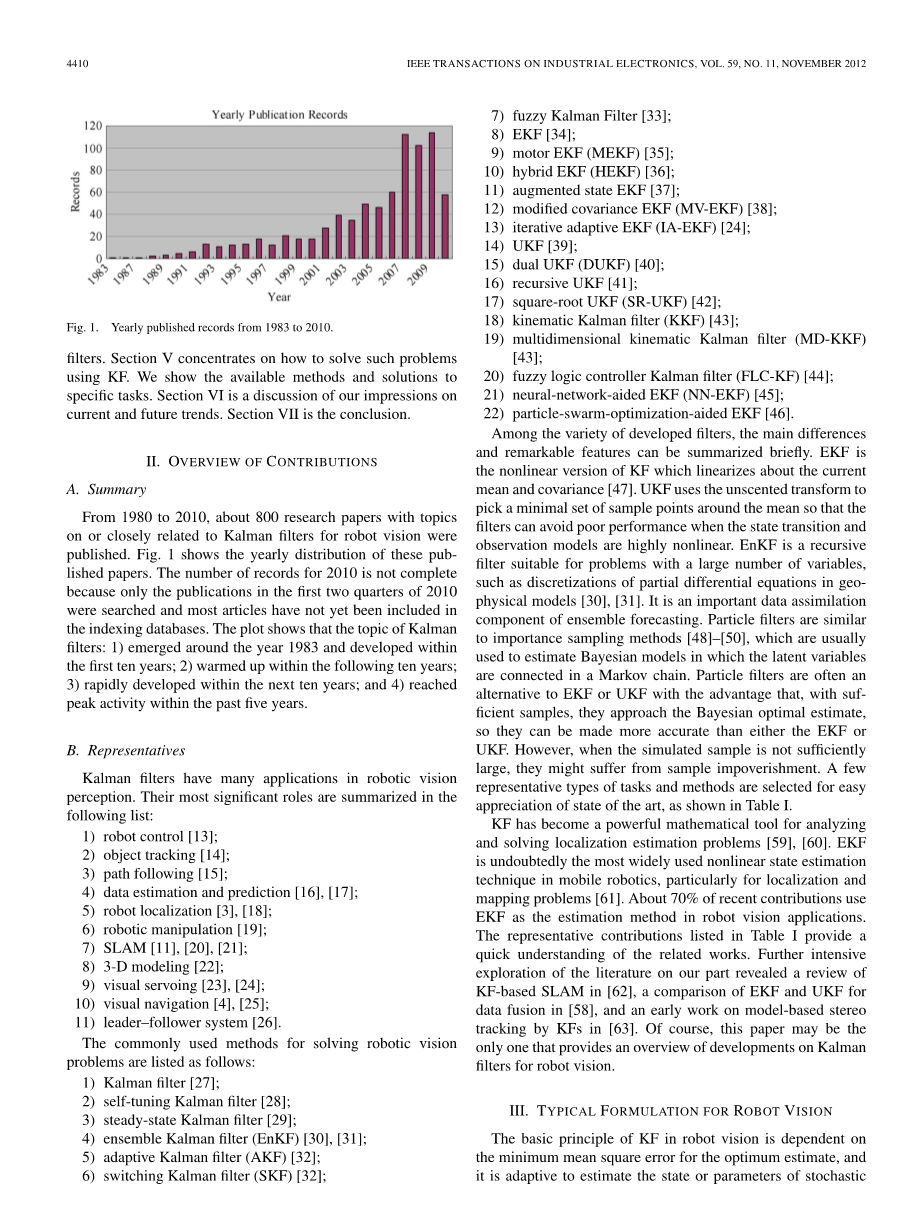
图1 、1983年至2010年的年度出版记录。
-
- 贡献的概述
- 总结
从1980年到2010年,大约有800篇关于机器人视觉的卡尔曼滤波器或与之密切相关的研究论文发表。图1显示了这些出版报纸的年度发行情况。2010年的记录数量并不完整,因为只搜索了2010年前两个季度的出版物,而且大多数文章还没有包含在索引数据库中。图中显示了卡尔曼滤波器的主题:(1)1983年左右出现,前十年发展;(2)十年内热身;(3)在未来十年内迅速发展;(4)近五年来活动达到高峰。
B.代表
卡尔曼滤波器在机器人视觉感知中有许多应用。他们最重要的作用总结如下:
- 机器人控制[13];
- 目标跟踪[14];
- 路径跟随[15];
- 数据估计与预测[16],[17];
- 机器人定位[3],[18];
- 机器人操作[19];
- 大满贯[11]、[20]、[21];
- 三维建模[22];
- 视觉伺服[23],[24];
- 视觉导航[4],[25];
- 引导-跟随系统[26]。
解决机器人视觉问题的常用方法如下:
- 卡尔曼滤波器[27];
- 自校正卡尔曼滤波器[28];
- 稳态卡尔曼滤波器[29];
- Ensemble Kalman滤波器(ENKF)[30],[31];
- 自适应卡尔曼滤波器(AKF)[32];
- 切换卡尔曼滤波器(SKF)[32];
- 模糊卡尔曼滤波器[33];
- EKF〔34〕;
- 电机EKF(MEKF)[35];
- 混合EKF(HEKF)[36];
- 增强状态EKF[37];
- 修正协方差ekf(MV-EKF)[38];
- 迭代自适应EKF(IA-EKF)[24];
- UKF〔39〕;
- 双UKF(DUKF)[40];
- 递归UKF[41];
- 平方根UKF(sr-UKF)[42];
- 运动卡尔曼滤波器(KKF)[43];
- 多维运动卡尔曼滤波器(MD-KKF)[43];
- 模糊逻辑控制器卡尔曼滤波(FLC-KF)[44];
- 神经网络辅助EKF(NN-EKF)[45];
- 粒子群优化辅助EKF[46]。
在已开发的各种滤波器中,可以简要总结其主要区别和显著特点。EKF是KF的非线性版本,它对当前的平均值和协方差进行线性化[47]。UKF使用无迹变换在均值附近选取一组最小的采样点,这样当状态转换和观测模型高度非线性时,滤波器可以避免性能不佳。ENKF是一种递归滤波器,适用于具有大量变量的问题,如地质物理模型中偏微分方程的离散化[30],[31]。它是集成预测中重要的数据同化部分。粒子滤波器与重要性抽样方法[48]–[50]相似,后者通常用于估计潜在变量以马尔可夫链连接的贝叶斯模型。粒子滤波器通常是EKF或UKF的替代品,其优点是,利用大量的样本,它们接近贝叶斯最优估计,因此它们可以比EKF或UKF更精确。然而,当模拟样品不够大时,可能会出现样品贫化。选择了一些具有代表性的任务和方法,以便于了解最新技术,如表一所示。
KF已经成为分析和解决本地化估计问题的强大数学工具[59]、[60]。EKF无疑是移动机器人中最广泛使用的非线性状态估计技术,尤其是定位和映射问题[61]。在机器人视觉应用中,约70%的研究者使用EKF作为估计方法。表一所列的代表性贡献提供了对相关工作的快速理解。我们对文献的进一步深入研究揭示了在[62]中对基于KF的SLAM的回顾,在[58]中对EKF和UKF进行数据融合的比较,以及在[63]中对基于模型的立体跟踪的早期工作。当然,本文可能是唯一一篇综述了卡尔曼滤波器在机器人视觉中的应用。
- 机器人视觉的简洁陈述
KF在机器人视觉中的基本原理是以最小均方误差为最优估计量,自适应地估计随机状态或参数。
表1
最近的代表
|
目的/任务 |
方法 |
代表 |
|
移动机器人定位 |
EKF用于机器人定位一个环境 |
[51]-2009 , [52]-2004 |
|
基于视觉的导航 |
EKF用于定位和定位估计 |
[25]-2010 , [4]-2009 |
|
注意对象检测 |
KF用于信息集成,参数适应 |
[53]-2010 |
|
图像稳定 |
EKF用于角度预测到实时性能 |
[34]-2010 |
|
手眼标定 |
EKF用于参数估计与优化 |
[54]-2008 |
|
实时跟踪 |
KF用于结合基于回声状态网络的自校正人脸跟踪,UKF多假设跟踪器跟踪多个球 |
[55]-2010, [56]-2009 |
|
无人驾驶汽车 |
EKF用于快速检测和跟踪道路路缘 |
[57]-2004 |
|
视觉伺服控制 |
UKF用于融合来自视觉系统的数据和惯性测量单元,迭代自适应EKF用于噪声适应和测量线性化 |
[23]-2010, [24]-2010 |
|
视觉测程法 |
UKF RANSAC用于运动产生的结构 |
[16]-2010, [22]-1998 |
|
姿态估计 |
EFK用于误差补偿和信息融合 |
[7]-2010 |
|
数据融合 |
EKF/UKF用于惯性和视觉数据融合 |
[58]-2007 |
|
机器人视觉输入:2D/3D图像序列 |
darr;
|
图像差异:运动检测和特征跟踪 |
darr;
|
滤波输入:跟踪窗口初始坐标和初始半径 |
darr;
|
卡尔曼滤波器:估计和预测 |
darr;
|
机器人动作输出:位置、运动和轨迹 |
图2 卡尔曼滤波器在机器人视觉中应用的一般过程。
视觉系统中的线性离散系统[24],[27]。这种应用的一般程序在图2得以描述。
KF在机器人视觉中的一般问题是估计操纵或运动的受控动作的位置状态,这是由具有测量z的线性随机(1)控制的zkRm定义见(2)。注意随机变量VK和WK分别表示状态噪声和测量噪声。假设它们彼此独立,白色具有正态概率分布。A是Mtimes;M矩阵,H是Ntimes;M矩阵。它们可能在每一步时间内发生变化,但大多数情况下,假设它们在KF中是恒定的。
Xk 1 = AXk vk (1)
zk = H Xk wk . (2)
考虑在动态机器人环境中处理移动物体的过程模型。一般来说,从视觉上看,运动可分为平移速度vx(k)和vy (k)和参考框架的旋转phi;(k)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[609506],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
Xk = [x(k) y(k) vx(k) vx(k) phi;(k)]T |
(3) |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

