
英语原文共 25 页,剩余内容已隐藏,支付完成后下载完整资料
功率损耗和负载分布模型包括摩擦效应的齿轮和螺旋齿轮
佩德罗M.T.马克斯,拉米罗C.马丁斯,豪尔赫H.O.塞亚布拉
啮合齿轮齿之间的摩擦是齿轮箱在接近标称操作条件下最有影响力的动力损失源。 速度,载荷和摩擦系数是关于齿轮摩擦损失的一些最重要的因素。 这项工作的目的是为齿轮和螺旋齿轮引入齿轮负载分配模型,考虑到弹性和摩擦效应,允许对齿轮摩擦损失做更精确的估计。
关键词 负荷分配 功率损耗 齿轮
1.介绍
齿轮的效率已经成为研究对象很多年了。如今对环境和可持续发展的关注以及通过其生命周期效率来最小化任何机器的操作成本的需要仍然是令人关注的问题。Houml;hn等人提出的一项研究表明,改善作用于齿轮几何设计和滚动轴承选择的齿轮箱功率损失是可能的。最近Petry-Johnson等人提出一种在高速和可变转矩条件下的测试方法来测量齿轮效率。一些齿轮设计变量的影响在功率损失中进行评估。这些结果后来被Chang等人使用以验证他们开发的功率损耗模型。
最近,Fernandes等人对三种不同齿轮几何形状产生的功率损耗进行了广泛的实验测试和建模。 滚动轴承模型以及齿轮损耗模型通过简单的实验测试进行了正确的校准。相同的润滑剂随后在另一个实验活动中使用,并且使用校准模型的功率损失预测与测量非常一致。
最常见的齿轮效率方法通常考虑恒定和平均摩擦系数,即输入功率
并依赖于齿轮的几何形状和负载齿轮损耗因数。具有正确的载荷分布和摩擦配方对于获得准确的功率损耗预测是非常重要的。
一些作者已经提出了基于经验研究的公式,其旨在提供沿着接触路径的平均和恒定的摩擦系数。 最近徐提出了一个从大量的数值模拟得出的实验验证公式,可用于计算沿啮合中的接触路径的摩擦系数牙齿对。
在以前的作品中几位作者已经研究了齿轮损耗因数问题。可用的制剂
在文献中有不同的假设。这些配方通常对正齿轮工作相当好,但在
的螺旋齿轮的情况下一些注意事项必须采取。具有精确的齿轮损耗因子估计是更好的齿轮功率损耗估计的基础。
一些作品只是仅举几例,考虑到已经处理啮合齿轮中负载分配问题的不同方法。考虑到考虑到网格刚度的负载分布将导致不仅更好地理解沿着接触路径的功率损耗,而且允许更精确的齿轮损耗因子的计算。它还可以有助于解释某些齿面窘迫现象的发生。
在这项工作中负载分布问题研究考虑刚性和弹性牙齿,而忽视动态和
赫兹效应。负载相关的赫兹非线性效应在网格刚度中比在非线性效应减弱的负载分布中起更重要的作用。静态刚性模型基于接触线的长度,并且利用Heaviside阶梯函数的近似的优点来获得负载分布的连续描述。
静态弹性模型基于存储在系统中的总势能的归一化。 使用拉格朗日乘子引入包括摩擦力的负载平衡。 这个解决方案是作者已经提出的以前工作的精简版。
静态弹性载荷分布模型也用于评估三个齿轮几何形状的齿轮损耗因子:齿轮,斜齿轮和“低损耗”齿轮。
本文的主要目标是提出两种不同的齿轮负载分配模型,这些模型具有简单的公式,实现,并且在关于正齿轮或斜齿轮几何结构的应用中几乎没有限制。
2.齿轮几何
在啮合过程中,齿轮齿沿着平行线接触,所述平行线形成在垂直于所有啮合齿的表面的每个时刻的平面。 该平面,即作用平面,也与两个基本圆柱体相切。
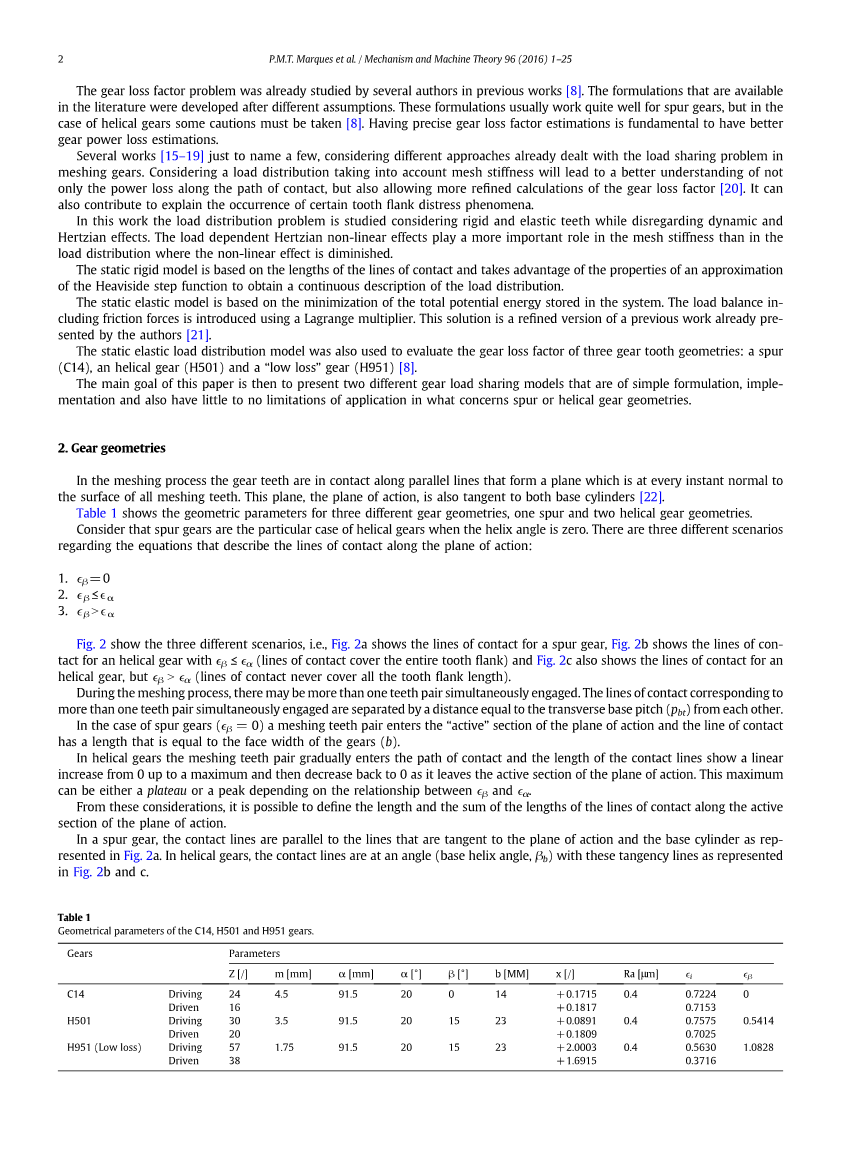
表1 显示了三种不同的齿轮几何一正和两个斜齿轮的几何形状的几何参数。
考虑到,当螺旋角为零时,正齿轮是螺旋齿轮的特定情况。 关于描述沿着作用平面的接触线的方程,存在三种不同的情况:
1.εbeta;=0
2.εbeta;le;εalpha;
3.εbeta;gt;εalpha;
图2示出了三种不同的情况, 图2a示出了正齿轮的接触线, 图2b示出了具有εbeta;le;εalpha;的斜齿轮的接触线(接触线覆盖整个齿面) 图2c还示出了用于螺旋齿轮的接触线,但是εbeta;gt;εalpha;(接触线从不覆盖所有的齿面长度).
在啮合过程中,可以有多于一个的齿对同时啮合。对应于同时接合的多于一个齿对的接触线彼此分开等于横向基部节距(pbt)的距离。
在正齿轮(εbeta;= 0)的情况下,啮合齿对进入作用平面的“主动”部分,并且接触线具有等于齿轮(b)的表面宽度的长度。
在螺旋齿轮中,啮合齿对逐渐进入接触路径,并且接触线的长度显示从0到最大值的线性增加,然后在离开作用平面的作用部分时减小回到0。 该最大值可以是平台或峰值,这取决于εbeta;和εalpha;之间的关系。
从这些考虑,可以限定沿着活性物的接触线的长度和总和截面的作用平面。
在正齿轮中,接触线平行于与作用平面和基圆柱相切的线,如图2a所示。 在螺旋齿轮中,接触线与这些角度线成角度(基本螺旋角,beta;b),如图 2b和c所示。
表格1
C14,H501和H951齿轮的几何参数。
图1 显示动作切线的基圆,显示在接触线的平面,然后在本地投影图
三个齿轮几何(正齿轮和斜齿轮)的作用面。C14和H501是“常规的”正齿轮和斜齿轮几何形状,而H951是一个“低损耗”齿轮。 计算功率损耗,计算公式(1)依赖于长度的接触路径,而不仅仅是滑动速度。
图2清楚地揭示了为什么H951是一个“低损失”档,路径
接触短得多(较短的接触路径也意味着较低的滑动速度)。
图 1.乘数配置中C14,H501和H951齿轮几何的作用平面和接触线(几何接近)。
3.配方和负载共享
啮合齿之间的接触压力取决于负载和接触面积。 这个领域的节拍取决于接触线(螺旋齿轮)和齿宽(正齿轮)和赫兹的长度。如果忽略摩擦力,则沿着接触线乘以基础螺旋角(beta;b)和基部半径(rbw)的余弦乘以正交于接触齿表面的每单位长度的力的积分必须使得 结果是由从动齿轮传递的扭矩(Mw),公式 (2)(忽略摩擦转矩)。
考虑到齿轮齿是无限刚性(几何接近)或齿是柔性的(弹性接近),可以计算沿着接触路径的齿上的负载。 将分析这两种方法。
3.1.刚性静电
3.1.1. 接触线
齿上的接触线的长度是恒定的,因此进入作用平面的齿可以被视为在线,在描述接触线的长度的总和的函数中形成恒定值。 Heaviside函数也是已知的,因为阶跃函数具有这样的性质。
Heaviside函数可以使用公式 (3). 对于k = 1000的值,分析近似与理论Heaviside函数良好一致。 使用这种方法的有趣的事情是,
每次齿对进入或离开接触时的精细独立域。 Heaviside函数是连续的。
接触线的长度与正齿轮几何形状的作用平面(beta;= 0)的作用平面上的齿上的面宽度的比率然后由等式 (4)。 xi;是沿着接触路径的非三维坐标(距离除以横向基底节距,pbt)。
等式 (5)是接触线沿接触的路径中的所有活性啮合齿对的长度之和。
(5)
图3显示方程(4)和(5)对C 14齿轮的几何形状的应用。
前面的方程(方程(4)和(5))仅对正齿轮有效。 对于螺旋齿轮,Heaviside函数可以与线性函数组合以产生特征线性增量和描述单个螺旋齿上的接触线的长度的函数的恒定特征。
(6)
等式 (7)是接触线沿接触的路径中的所有活性啮合齿对的长度之和。
(7)
图4显示公式(6)和(7)对H501和H951齿轮的几何形状的应用。
在以前的作品中Maatar和Velex 等人提出一种分析制剂来描述随时间变化的接触完全渐开线齿轮和螺旋齿轮之间的长度。显示接触长度可以表示为傅里叶级数。
图5比较了考虑到所建议的海维赛德函数方法与先前由Maatar等人引入的公式的正齿轮几何结果。 等式(3)中的k值保持在k = 1000,并且对于基于傅立叶的公式考虑100次谐波。 两种制剂都旨在做相同的,但是基于海维赛的制剂产生更平滑的结果,特别是在正齿轮的情况下和从一个到两个啮合的齿的过渡,并且甚至对于非常高数量的谐波,在过渡点附近的峰是可见的。 更平滑的描述的问题可以证明是有利的,如果在随后阶段使用时变接触长度来执行一些计算涉及衍品。在螺旋齿轮方面,两种方法都产生非常好的和类似的结果。
3.1.2. 负载共享
然后,沿着作用平面的活动部分的沿着齿的每单位长度的载荷由等式(8)给出。 所结果的
根据等式(9)定义沿着接触路径作用在单个齿中的法向载荷.
公式(9)表示由一对接触齿支撑的负载是力乘以共享函数.
负载分担函数是在齿上的接触线的长度之间的分数除以在沿着接触路径的特定位置中的所有接触对的接触线的长度的总和.
图6,图7和图8显示了三种不同齿轮几何形状的函数和。
负载分布函数的差异是相当清楚的。 C14几何图形显示步骤增加或减少,负载共享功能是否牙齿进入或离开作用平面。 螺旋齿轮逐渐增加或当齿离开或进入作用平面时减小负载,这是由于“渐进”啮合的结果
到螺旋角。 即使在两个螺旋齿轮(H501和H951)之间,也可以观察到一些显着的差异。显然,在这两种几何形状上渐进的啮合过程,这些齿轮几何形状的εalpha;和εbeta;之间的关系是非常不同的,这反映在负载分布函数(图7和图8)。 在H951 εbeta;gt;εalpha;的情况下,这意味着
将采用的最大值大于1,因为在牙齿上不可能具有完整的接触线(b / cos(beta;b))。
3.2. 弹性静态
齿轮齿的几何形状相当复杂,因此,使用数值方法来研究负载分布
接触的路径被视为可能性。 在第二种方法中,动态效应将被忽略,它也将被忽略,假定齿的变形如此小,使得尽管有弹性,齿的几何形状是相同的形变。
由该从动齿轮传递的转矩(Mw)为假定恒定。 几个单位力分布在牙齿上侧面,使得在接触线处,这些单位力处于作用平面中并且垂直于齿面,
(图9)。 利用有限元代码,可以获得感兴趣点的位移单位负载。 对于驱动和驱动齿轮应该重复该过程,以便获得位移字段。
为了获得在感兴趣的方向上的位移矩阵,由FEM代码给出的位移的分量形成的矢量必须在垂直于齿面的方向上投影,该方向是位移矢量和 相应的单位力矢量。
令由aij表示的柔度系数定义为由于施加在j中的单位力而在i中的位移。 由于这种问题的线性性质,由任何力F i引起的i的位移由等式(10)给出。
由于其他点j中的法向载荷的组合,i中的位移可以通过效应的叠加来计算,公式(11)。
正常负载F 1对系统的势能的贡献可以使用公式 (12)。
存储在啮合齿轮对k中的驱动齿轮1或从动齿轮2的齿中的弹性势能在沿齿的横向轮廓处的n个离散负载的接触路径的特定位置 由等式(13)给出。
存储在用于m个齿对的齿轮的啮合齿中接触的弹性势能于是由等式(14)给出。
作用在驱动齿轮的侧面中的力的总和必须平衡施加到驱动齿轮的扭矩(如果摩擦扭矩被忽略)。 等式 (15)是这个平衡的数学表达式。
在等式 (15)忽略了耗散力。 这个公式(15 )可以被修改,以考虑到的摩擦力通过摩擦系数(mu;)如公式 (16)。 其中rbw是从动齿轮的基圆半径而rcw是垂直于接触线测量的距离直到与接触的作用平面的线的交点从动齿轮的基圆柱与基础螺旋角的余弦相乘。 在这种情况下,齿法向力和摩擦力的组合结果应平衡施加的扭矩Mw。
简化:
组合方程 (14)和(17)用于在系统中作用在弹性势能约束表达式获得等式 (18) 注意拉格朗日乘数lambda;,通过公式(17)施加平衡条件。
考虑到,
并简化:
在某一啮合时刻在牙齿上的负载分布是使系统的总能量最小的一个,等式(20)。 方程(21)的同时系统允许计算最小值。
扩展方程(21)获得方程(22)的同时系统。
代入C = rbw·cos(beta;b)和,等式 (22)可以根据(23)以矩阵形式写入。
K,F和lambda;的详细形式见附录A.
这个线性同步系统的方程。 将导致不仅在作用平面中而且在作用平面中的负载的确定也垂直于接触线。 这些可以被视为线路负载在长度上的积分的结果。由于忽略了动态效应,解决沿着接触路径的固定数量的点的同时求解(扫描型模拟)导致负载分布。 拉格朗日乘数是由于负载引起的位移的指示,并且如果施加单位负载(Mw / C = 1),则可以获得网格刚度函数。
灵活性系数ai使用开源FEM代码ElmerFem [25]获得。 有关FEM实现的更多细节可以在附录B中找到。
3.2.1. 局部摩擦系数
全文共14014字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144817],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

