英语原文共 19 页,剩余内容已隐藏,支付完成后下载完整资料
浮动太阳轮的行星齿轮组啮合齿轮分析
Shyi-Jeng Tsai, Guan-Lin Huang , Siang-Yu Ye
关键词:行星齿轮组、齿轮啮合分析、活动区、装配性、反弹
摘要:这项研究的目的是提出一种用于浮动太阳轮的行星齿轮组啮合齿轮分析的分析方法。通过专注于基本的几何关系,我们推导出了一套基于具有相关误差的齿轮啮合未改性或改性侧面之间的齿间隙的计算精确的渐开线齿轮几何方程。浮动太阳轮的两个约束条件是为确定可移动区域而建立的。数值算例是为了探索行星齿轮数,晃动,和齿隙的装配或制造误差,太阳轮的可移动区域和可装配性的影响。
1、介绍
紧凑型设计,高功率密度和行星齿轮驱动器的输入和输出轴的同轴排列在电力传输中起到了非常重要的作用。作为多行星齿轮的结果,该行星齿轮组的啮合齿的作用比平行正齿轮或斜齿轮组更复杂。满载和空载的条件下各种齿轮的多个齿对之间的齿面接触的分析是用于提高行星齿轮驱动器的性能的基础。在一般情况下,行星齿轮驱动的二维几何和静态分析是一个基本的,但有效的工具,它可以被扩展或用于三维静态或动态分析。一些重要问题比如各太阳-行星-环形齿轮副的啮合状态,未加载和加载传输错误,有没有齿形修正的载荷分配应包括在内。这些大多是交织在一起。比如,多个行星之中,啮合齿之间的载荷分配很容易被制造和装配误差影响,这也影响到齿轮的啮合状态。
在过去的几年中,一些有价值的研究已经被实施去寻求解决在行星齿轮系的载荷分配问题。BODAS和Kahraman[1]使用FE法来分析齿轮的制造误差和行星齿轮驱动器的载荷分配的载体的影响。Boguski,Kahraman[2]等人利用两个相邻的探针来测量太阳轮在运转过程中的径向方向的轨迹。他们的研究表明,太阳轮轨道的尺寸形状与装配或制造误差和行星齿轮组的行星啮合相位条件有关。尤其是太阳轮的径向运动被应用误差所限制。Singh[3]应用有限元分析有4个,5个或6个行星的行星齿轮组的载荷分配,但是出现了同样的错误。他还建立了一个简单的架构来解释和预测行星齿轮传动装置的载荷分配[4,5]。
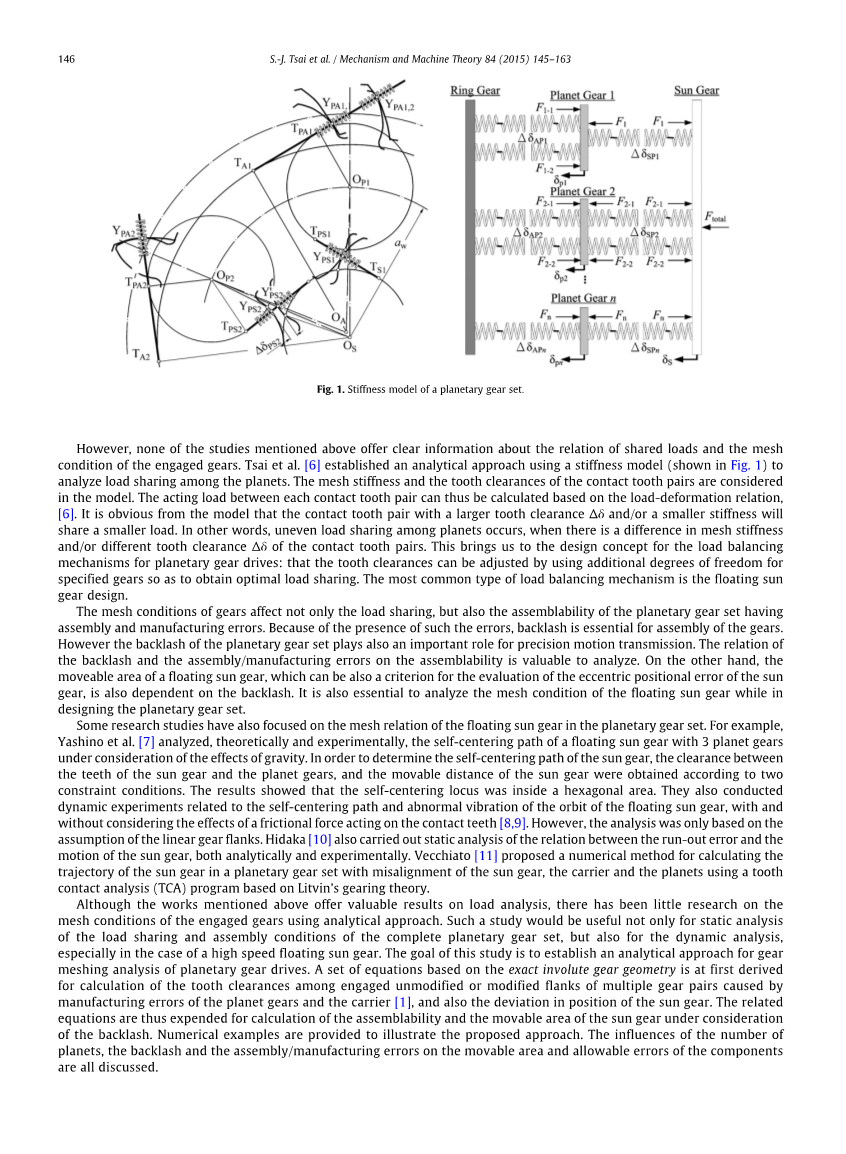
图1 行星齿轮组的刚度模型
然而,上面提到的研究中没有提供有关载荷分配的关系和啮合齿轮的啮合状态的明确信息。Tsai等人[6]建立了一种使用刚度模型分析的方法(示于图1),以分析行星间的载荷分配。在模型中,考虑啮合刚度和接触齿对的齿隙。每个接触齿对之间的荷载也因此可以根据负载变形关系来计算[6]。从模型中很明显看出,具有较大齿隙和/或更小的刚度的接触齿对Delta;delta;将共享一个较小的载荷。换言之,行星之间不均匀的载荷分配发生时,啮合刚度和/或不同的齿隙的接触齿对Delta;delta;的差存在差异。这也就给我们带来了用于行星齿轮驱动的负载平衡机制的设计概念:齿隙可以通过使用附加自由度用于指定齿轮,以获得最优的载荷分配的方法进行调整。而负载平衡机制的最常见的类型是浮动太阳轮设计。
齿轮的啮合条件不仅影响载荷分配,而且影响具有装配和制造误差的行星齿轮组的可装配性。因为这样的误差的存在,间隙是齿轮装配中必不可少的。然而行星齿轮组的齿隙也在精密运动传递中起重要作用。间隙和在可装配性上的装配/制造误差的关系是值得分析的。另一方面,浮动太阳齿轮的可移动区域也可以成为太阳轮的偏心位置误差的评价标准,并且依赖于该间隙。在设计行星齿轮组时,分析浮动太阳轮的啮合状态也是必不可少的。
一些研究也已经集中在行星齿轮组的浮动太阳轮的啮合关系,例如,Yashino等人[7]从理论上和实验上分析,在考虑重力的影响下,3行星齿轮浮动太阳轮的自定心路径。以确定太阳齿轮的自定心路径,太阳轮齿和行星轮齿之间的间隙,以及根据两个约束的条件所得到的太阳齿轮的可移动距离。结果表明,自定心轨迹在六边形区域内。他们还进行了有关的自定心路径和浮动太阳齿轮的轨道的异常振动,有和没有考虑作用在接触齿上的摩擦力影响的动态实验[8,9]。然而,分析只是基于线性齿轮侧面的假设。Hidaka [10]还通过分析和实验进行了跳动误差和太阳齿轮的运动之间的关系的静态分析。Vecchiato [11] 提出了一种在一个行星齿轮组与具有错位的太阳齿轮上计算太阳轮轨迹的数值方法。
尽管上述实验提供了有价值的负载分析结果,很少有研究使用的分析方法讨论啮合齿轮的啮合条件。这样的研究将是有益的,不仅是对完整行星齿轮组的载荷分配和装配条件的静态分析,也包括对动态的分析,特别是在高速浮动太阳轮的情况下。这项研究的目的是建立一种行星传动的齿轮啮合分析的分析方法。一组基于确定的渐开线齿轮的几何形状的方程组被导出用于由行星齿轮制造误差引起的多齿轮对啮合的未改性或改性侧面和载体之间的齿隙计算[1],以及太阳轮的位置误差。相关方程也因此花费用于可装配性和考虑间隙的太阳轮的可移动区域的计算。通过数值例子来说明该方法。(数例中)行星数目的影响,间隙和可移动区域的制造/装配误差以及构建的容许误差都被讨论。
2、齿轮啮合的基本关系
2.1、啮合齿对之间的间隙关系
当行星齿轮组出现误差时,会出现不同的间隙或啮合齿间的干扰。作为结果,行星之间的负载分配不均,并且这或许使得无法在极端的情况下装配行星齿轮组。齿隙,即啮合齿的活性侧面之间的间隔,在这种情况下起重要的作用。间隙通过侧面可以分为活动侧或不活动侧。
具有两个(或多于两个)行星齿轮,即行星1和行星i的行星齿轮系,被认为是为几何关系的推导,如示于图2,行星1是参考齿轮。太阳轮的理想中心位置Os与环形齿轮的中心重合。在浮动太阳齿轮的情况下,太阳齿轮中心位置O#39;s的误差是由两个参数,即角theta;s和距离Delta;S确定。但是,由于太阳齿轮的运动,两个行星的中心到太阳轮的距离分别随着aw1和awi到a′w1 和a′wi的变化而变化,而相对于运动太阳轮的中心的两个行星的中心之间的间隔角gamma;i也随着gamma;#39;i的角度变化而变化。
假定行星齿轮1同时与太阳齿轮和无间隙的环形齿轮啮合,用同样的方法,行星齿轮i的啮合齿与环形齿轮之间没有间隙。然而,装配/制造误差的出现可能导致太阳轮和行星轮i的位置误差,这样,行星轮i和太阳轮的齿之间将会产生间隙。通过长度Ls到节点CPS1的接触点YPS1计算间隙[6]。基于渐开线形状的特性,太阳轮啮合齿的位置能通过角phi;S1表示出来,这也取决于LS。
|
|
(1) |
另一方面,行星齿轮1的啮合齿的位置能够通过角phi;PS1表示出来,自由间隙条件为:
|
|
(2) |
行星齿轮1和环齿轮的接触点YPA1的位置也可以由以下关系确定
|
|
(3) |
两切点TPS和TPA1间的角sigma;P1等于
|
|
(4) |
图2 行星齿轮系的几何关系
行星轮1与环形齿轮的啮合齿的位置关系如下:
|
|
(5) |
以同样的方式,行星齿轮i与环形齿轮啮合的接触齿的位置可知,
|
|
(6) |
而
|
|
(7) |
接触点YPAi通过与自由间隙的关系,也确定了行星齿轮i的啮合齿的位置
|
|
(8) |
如果行星轮i的侧面齿侧上的点与太阳轮侧面齿侧的点不重合,间隙存在,即
|
|
(9) |
行星齿轮i的齿的位置角度是
|
|
(10) |
而太阳齿轮的相应的齿的位置角是
|
|
(11) |
根据方程(10)和(11),角sigma;Pi和sigma;S如下:
|
|
(12) |
|
|
(13) |
相关方程带入到方程(9)行星轮i和太阳轮的两个啮合齿之间的间隙Delta;delta;PSi可以表示为
|
|
(14) |
2.2、装配/制造误差对齿隙关系的影响
在理想状态下,既不存在装配误差也不存在制造误差,并且太阳轮位于环形齿轮的中心,考虑如下情况:
▪所考虑的行星齿轮的齿厚是相同的,即,psi;bP1=psi;bPi
▪与太阳轮和环形轮啮合的行星齿轮的工作压力角相等,中心距也相等。即
alpha;#39;PS1=alpha;#39;Psi,alpha;PA1=alpha;PAi
▪分离角gamma;i等于理论值,即gamma;#39;i=gamma;i理想。
在这种条件下的间隙delta;为等于零,并且可知行星齿轮系的装配关系,即
(15)
考虑误差的存在以及太阳齿轮的位置误差,行星轮i与太阳轮的啮合齿之间的间隙可以通过如下关系将(15)带入到(14)中
(16)
从式(16)中得出,啮合齿间的齿隙Delta;delta;PS只受相应的齿轮或行星齿轮的齿厚误差的中心位置的相对误差的影响,而不受齿对的啮合位置LS的影响。因为两个啮合渐开线齿轮具有相同的基圆齿距,每个啮合齿对中的齿隙Delta;delta;PS在多个齿对接触的情况下的值相同,因此,间隙Delta;delta;PS根据公式(16)计算不仅适用于单齿对接触,而且适用于多齿对接触。一般情况下,太阳轮和行星轮之间的误差可分为四类:
(1)行星齿轮的径向位置误差。这里考虑太阳轮的位置误差和载体上的行星销孔的径向位置误差,它们不仅影响工作压力角alpha;#39;PS1,太阳-行星齿轮对alpha;#39;PSi,而且影响压力角alpha;PA1,行星环形齿轮对alpha;PAi,如式(16)。考虑与移动太阳轮配对的行星轮,压力角alpha;#39;PS1或alpha;#39;Psi通过如下关系计算,
(17)
其中,位置误差a#39;w1(i)的中心距可以从图2所示的几何关系来获得,从而
(18)
压力角alpha;PA1或行星-环形齿轮副alpha;PAi与在销孔半径的误差(AW1 εr1)或(AWI εri)计算如下:
(19)
(2)行星齿轮的齿厚偏差。影响基圆Delta;psi;bP的偏离角Delta;psi;bP,其取决于基圆rbp的半径和行星齿轮i的弦齿厚偏差εpsi;,即
(20)
(3)行星齿轮的切向位置误差。两种误差影响齿隙间的分离角,即行星销孔的切向位置误差以及与太阳轮的偏离中心有关的每两个行星齿轮的中心之间的分隔角。在载体为行星齿轮i的销孔位于切线方向与误差εt的情况下,式(16)中角误差Delta;gamma;不能被忽略,并等于
(21)
(4)太阳轮的偏心误差。位置误差或太阳轮的位置的变化不仅影响中心距,而且影响太阳齿轮和每个行星齿轮之间的分隔角。由于分离角的变化,太阳轮的中心和第i个行星轮之间的齿隙是根据Delta;theta;1和Delta;theta;i之间的个体角度差计算,见式(16)。通过变量Delta;S和太阳轮的位置误差theta;S,未知Delta;theta;1(ⅰ)是可解的,参照图2,
(22)
在上面提到的误差中,径向和切向位置误差和单个行星齿轮的齿厚偏差只对太阳轮,环形轮和其本身之间的齿隙有直接影响。另一方面,在太阳齿轮的位置变化意味着所有相对于太阳齿轮的行星齿轮的位置也将改变。太阳齿轮的位置误差从而影响与之接合所有行星齿轮的齿间隙。
2.3、确定所有接触齿对的位置
2.1节中描述的齿轮啮合关系也可以用于测定环-行星和/或太阳-行星齿轮对的其他接触齿对的位置。在这种方法的帮助下,行星齿轮组的齿轮副的单或双齿对接触可以进一步确定。这种方法对于行星齿轮啮合相位的分析是非常有用的。一般而言,有两种不同的齿轮副的齿面接触的是要区分的:
(1)太阳轮
全文共15172字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144816],资料为PDF文档或Word文档,PDF文档可免费转换为Word

