外文文献翻译
利用环境交通和移动力识别的桥梁损伤检测
Eugene OBrien1, Ciaran Carey1 and Jennifer Keenahan2,*,dagger;
爱尔兰都柏林都柏林大学土木、结构与环境工程系
Arup,Ringsend Road,Ringsend,Dublin 4,爱尔兰
摘要
本文研究了一种使用移动力识别算法进行损伤检测的新颖方法。该方法旨在检测通过桥梁的车辆施加的预测力的变化,这些变化显示出对损伤的敏感。在理论模拟中使用二维车桥相互作用模型来评估该方法在检测刚度变化中的有效性。 模拟类似车辆的编队,使用最大频率的力图作为损伤指标。 结果表明,该方法比直接测量位移对损伤更敏感,并且可以检测到深度的6%梁高的裂纹引起的刚度损失。
关键词:移动力识别;车桥互动;桥梁损坏;桥梁动力学;大桥位移;结构健康监测
- 介绍
在大多数发达国家,基于视觉检查对桥梁状况进行评估。然而,这种检查是劳动密集型的,通常是确定真实状况的不可靠方法。有效的桥梁检查的重要性的例子包括:2007年8月1日[1],明尼阿波利斯州的34号州际桥梁崩塌,以及2012年5月27日在西雅图的Skagit河跨越5座桥梁的崩塌[2]。在其他情况下,采取过度预防措施,造成不必要的修理。视觉检查的缺点,加上计算能力和信号处理能力的提高,近年来已经导致基于传感器的桥梁状况监测。这里提供了关于桥梁损伤检测方法的简要文献综述。[3-6]中可以找到更全面的文献综述。
刚度或质量变化与自然频率变化之间的物理关系导致许多在损伤检测领域使用固有频率作为损伤的指标[7]。Cerda等 [8]进行实验工作,其中损伤被模拟为桥梁质量的变化,并且频率变化被测试为损伤指标。墨西拿等 [9]提出了一种基于由于损伤引起的线性频率偏移的方法,并且仅考虑刚度的变化,能够解决多个损伤位置和强度。
Kim和Stubbs [10]提出了一种损伤检测算法,其中关于损伤位置和严重程度的信息直接从模式形状的变化推断出来。为了比较频率与模式形状方法,Kim等人 [11]应用基于频率和模态应变能的方法来识别模拟梁中的损伤位置和严重性。这两种方法用于几种损伤情况,发现模态应变能法比基于频率的方法提供了更准确的位置预测。然而,可能难以将健康和轻微损坏的结构之间的模态特征的差异检测到所需的准确度水平。Shih等人 [12]建议在其损伤检测方法中结合自然频率,模态染色能量和模态灵活性的变化。
与模式形状和固有频率相比,对阻尼作为损伤指标的使用研究较少[13]。 然而,可以让人认为的是,在某些情况下,阻尼比固有频率更敏感[14]。 Curadelli等 [15]表明,在某些情况下,检测到很少或没有频率变化,但阻尼变化成功地用于检测裂缝。Modena等 [16]表明,一些裂纹引起阻尼的显着变化,但频率变化很小,需要检测更高的模式形状。Jeary等 [17]从30个结构的响应的短时间历史中提取非线性阻尼数据到随机振动,并且将阻尼变化的可能性作为桥梁损伤的指标。此外,许多研究人员指出,阻尼可以是有用的损伤敏感特征,并且高度地表明结构在其寿命期间已经经历的损伤量[18-20]。
小波变换可用于强调信号中的不连续性,例如当轴通过损坏的部分时斜率的不连续性。它们是基于任何信号可以分解成一系列称为小波的本地基函数的思想。 可以将变换应用并映射到结构的空间或时域。因此,它们可以用于发现模式形状的突然变化[21-23],通常表示损伤,定位从加速时间响应到响应突然变化[24,25]或分析位移响应在桥的中跨[26]。在每种情况下,异常信号的能量表示裂纹的大小。
NN是将输出与输入相关联的数值技术。它由一组相互联系的称为神经元的处理单元组成。最常见的是在训练阶段改变其结构的自适应系统。经过训练的网络用于建模输入和输出之间的复杂关系,并在数据中查找模式。它们已经在许多不同的应用中成功应用,包括基于振动的损伤识别。一般来说,NN适用于有重要信息数据库可用的问题,但难以明确指定关系的问题。 Hattori等人[27]基于NN技术开发桥梁状态识别技术。运行车辆引起的桥梁振动数据是输入,结构损伤条件是输出。Lee et al。[28]提出了一种基于NN的损伤检测方法,使用健康和损坏结构之间的模式形状差异作为损伤检测的基本特征。
他的论文描述了一种使用移动力识别(MFI)算法来表示桥梁状况恶化的新颖方法。 OBrien等人提出了MFI对健康监测的应用 [29]其中,仪表车辆通过检查用于驾驶。 本文使用跨过桥梁的车辆人口的单个轴的平均力估计来检测相对较低水平的损伤。 用于产生测量力的车辆参数来自2轴车辆的称重运动(WIM)数据,因此,如[30]所述,使用环境流量检测到损坏。该方法的有效性的根本原因首先使用静态方程来解释。然后引入各种MFI技术,在本文中使用的特定MFI方法在第3节中详细说明。第5节讨论了使用应变信号的缺点以及需要使用偏转数据来检测损伤[31]。
- 静态概念 - 损伤如何影响计算
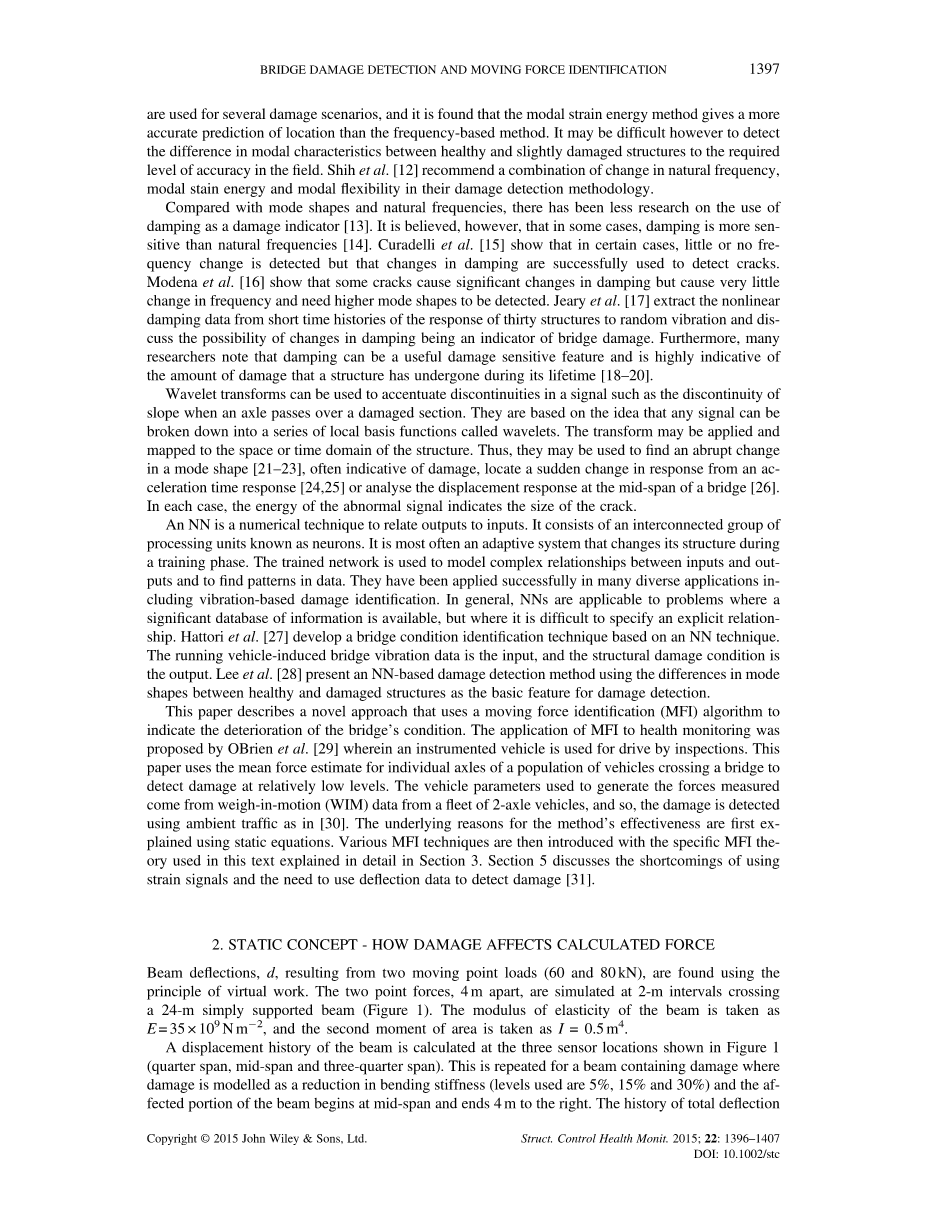
使用虚拟作业的原理找到由两个移动点载荷(60和80 kN)引起的梁偏转d。 相距4米的两点力以2米的间隔模拟,穿过24米的简支梁(图1)。光束的弹性模量为E = 35times;109 N m 2,第二个面积为I = 0.5 m2。
图1.穿过简支梁的两点力
在图1所示的三个传感器位置(四分之一跨度,中跨和四分之三跨度)处计算梁的位移历史。对于包含损伤的梁,重复这种损伤,其中损伤被建模为弯曲刚度的降低(使用的水平为5%,15%和30%),并且梁的受影响部分从中跨开始并且终止于4m是正确的。图2中示出了传感器在中跨处的总挠度的历史,如图2所示。如预期的那样,偏转随着梁越来越受损而增加。
考虑用于损伤检测的优化方法,其中确定目标函数,等于三个传感器位置处的测量误差和理论偏差之间差异的平方和。 理论偏差总是被认为是健康的偏转,测量的偏转可能是健康的或损坏的。 第i次扫描的目标函数是
其中dThsi是扫描i的传感器s的理论偏差,dMesi是相应的测量值。通过对W1和W2进行重新分析,得到最小化目标函数的力。 这类似于摩西首先提出的传统方法Bridge WIM [32],并由OBrien进一步描述[33,34]:
将两个导数设置为零可以为每次扫描提供两个未知数的两个方程,i,允许计算两个力。对于健康桥梁的情况,测量的偏转与理论桥梁的偏差相同,因此计算的力与所施加的力相同,对于所有的i都是恒定的。如果桥梁损坏,测量的偏差增加。如果然后按照健康的桥梁计算力值,则会导致计算值的错误。图3给出了不同程度损伤的计算力。
图2.由于两点负载对于不同程度的损伤造成的中跨偏差
图3.不同程度损伤的计算力
图3显示,该算法正确地预测了在健康波束的情况下的力,但对损伤敏感。 方程组的决定因素接近于零,证实了方程组的系统调节不好。这具有放大结果对局部刚度损失的敏感性的作用。
- 动态概念 - 运动识别理论的损伤检测
对于动态方程,寻求强制函数,使得测量值与计算值之间的差异最小。MFI理论的综述可以在[35]和[36]中找到。本文使用的MFI方法被称为最优状态估计方法[37],其中最小化被视为使用动态编程的多维控制过程。这种方法首先由Law and Fang [37]提出,随后由Gonzaacute;lez等人进一步改进。[34]。结构动力学的二阶矩阵微分方程是
其中{u}是位移向量,Mg,Cg和Kg分别是质量,阻尼和刚度矩阵,F(t)是强制函数的向量。通过定义速度{v}和加速度{a}的状态变量,等式3从第二阶等式减少到两个一阶方程:
其中[L]是将强制函数{g(t)}分配到相关自由度的位置矩阵。方程4和5以矩阵形式组合。
包含状态变量{u}和{v}的状态向量{X}:
然后使用它重写
方程7被转换成使用拉普拉斯变换的离散时间积分方案,指数矩阵和Padeacute;近似[38],并且变为
其中h是连续点j和j 1之间的时间步长。测量值dj是在桥上的离散点处,因此,必须使用矩阵Q来将测量值与相关状态相关联变量。然后,优化找到最小化给出的误差的{g} j
其中(x,y)表示向量积,W是单位矩阵。 这个逆命题题是高度病态的,因此,引入了一个解决附近问题并改进系统调节的正则化参数。B是正则化参数的对角矩阵,B的项数取决于轴的数量。使用L曲线法[39]选择最优正则化参数。 L曲线是正则化解的平滑范数与对数对数标度上的误差的残差范数的曲线图,并且从L形的角度选择最佳参数。本文利用一阶正则化[34],其中力的导数被正则化,力矢量然后被包括在状态向量中。
最小化问题是使用动态规划[40]和贝尔曼的最优原理来解决的[41]。公式11被称为策略函数,最优策略是最小化过程整体误差的方法。通过向后和向前循环找到最佳强制功能。在本文中,使用MFI理论发现的强制功能显示出对桥梁损伤的高度敏感性。
- 车辆 - 桥梁相互作用建模
使用桥梁示例来说明损伤检测方法。 简单支持的桥梁使用24个1 m长梁有限元建模,每个节点具有两个节点和两个自由度。 梁的深度为1.2米,面积和横截面积的二次力矩分别为1.152 m4和10 m2。 杨氏模量为35times;109 N m 2,密度为2400 kg m 3.桥阻尼比为3%。 损伤根据Sinha等人的建议进行了建模。 [42]并且在[24],[43-45]中使用,其中裂纹在光束深度的三倍的区域上引起刚度损失,从中心的最大值线性变化。 图4示出了梁的元件14处的裂纹,中间跨度为2m。 损伤参数delta;定义为裂纹深度与总光束深度的比值; 因此,delta;= 0.25意味着裂纹深度是光束深度的25%。
所使用的道路剖面根据ISO类#39;A#39;[46]生成,即“非常好”。相邻的道路轮廓是相关的,这创建了一个三维的“地毯”轮廓[47]。 图5显示了50米的道路剖面,其中所有可能的车轮路径突出显示。该轮廓通过长度为0.24m的移动平均过滤器,以便考虑轮胎接触片。车辆的横向位置使用蒙特卡罗模拟产生,假设截距正态分布与边缘的平均路径为2 m。
图4.损伤位置和程度
图5.道路剖面图,突出显示可能的路径
车队由两轴“半车”车型组成,考虑到车轴跳跃,俯仰和弹跳自由度。静态轴重的特性,车辆速度和车轴之间的距离取自荷兰阿纳姆的WIM站点。从一般交通数据中提取了具有4米到6米之间的车桥间隔的128 604双轴卡车的数据库。图6中所示的属性取自该数据库。
图6.车辆属性直方图:(a)车轴间距,(b)轴重和(c)车速
[48]和[49]中给出了非簧载质量,悬架刚度,悬架阻尼和轮胎刚度参数的平均值和标准偏差值,如表I所示。
表I.车队的动态特性
- 使用菌株进行动力鉴定和损伤检测
通常桥梁WIM应用[33],[50],[51]桥梁应变用于推断轴重。模拟横穿24米长梁的1000辆车辆。将具有50的信噪比的白高斯噪声添加到应变以允许测量误差。更严重的信噪比当然会影响MFI的准确性。推测的力是使用来自6,12和18 m(分别为四分之一,中间和三分之三跨度)的桥上测量点的应变信号来计算的。发现1000辆车辆的平均力,这产生了一个力模式,可以与进一步批次的车辆穿过相同的轮廓进行比较,因为统计的空间重复性[52],平均每个车辆动力学的影响。所得到的推断力在图7中见于四种不同的条件:(1)健康的束;(2)中跨裂缝;(3)跨越中距离1米;和(4)在中跨的右边裂缝2米。在所有三种情况下都存在裂纹,假设delta;= 0.3的损伤程度。
中跨的裂缝直接在传感器位置,因此效果显着。然而,一旦传感器和损坏位置之间的距离变得大于刚度损失的三角形程度(中跨的2米),则不能再检测到损伤。由于梁是静态的决定因素,应力分布与所有元件刚度无关,应力仅受传感器位置处刚度损失的影响。 姚等人 [53]注意到应变传感器在检测裂纹检测技术时与受影响区域直接接触的这种需求。可以注意到,对于健康病例的预测力量和裂缝在中跨的距离为2米的那些力并不完全相同。这是由于车辆穿过地毯轮廓行进的横向位置不同。结论是,决定性结构中的菌株在损伤检测方面的价值是有限的。
图7.使用应变(12 =中跨,13和14 =分别为跨度右侧的1 m和2 m)推断的轴力
- 使用偏差运动识别和损伤检测
为了克服这个问题,假设在三个测量点而不是应变测量偏转。相机技术正在快速发展,有理由认为可以使用高扫描频率的相机即将精确测量偏转。Wu和Casciati [54]提供了非接触式传感器检测位移的概述,RaghuPrasad等人[55]讨论使用静态偏转测量作为损伤检测的手段。最近在运动载荷预测中使用偏转测量可以在[56]和[57]中看到。使用Newmark-beta;集成方案[58]计算偏差,然后按照Green和Cebon [59]的描述迭代地求解车桥动态相互作用。与应变信号一样
全文共16711字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144685],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

