
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
氢驱动气动人工肌肉驱动器模糊自调谐PID控制
摘要
本文提出了氢驱动气动人工肌肉(PAM)驱动器的模糊自调谐PID控制方法。使用传统PID控制,氢驱动PAM驱动器的非线性热力学特性仍高度影响机械驱动本身,导致期望任务的偏差。模糊自调谐PID控制器是基于整个系统开发的,以实现氢驱动PAM驱动器的动态性能目标。基于闭环控制的模糊规则的期望特性被设计为在不同的操作条件下微调控制器的PID增益。氢驱动PAM驱动器的经验模型和特性被用作机械驱动的实质表示。质量-弹簧-阻尼器系统作为氢驱动PAM驱动器致动期间的典型机械负载。实施的结果表明,所提出的在机械负载下驱动氢驱动PAM的控制方法的可行性接近于期望性能。
关键词:气动肌肉,金属氢化物,热电模块,PID控制,模糊调谐
1引言
气动人工肌肉(PAM)被认为是一种轻便且柔顺的驱动器,目前在许多仿人类肌肉应用中起重要作用。事实上,它们广泛应用于人机交互,人类软启动和环境安全操作,具有非常好的合并特性。例如,脆性物体在各种人类运动下做机械处理;在康复中,矫形系统中的自适应手臂通过PAM开发而成;基于PMA驱动的假体肢体用于生物医学工程应用。此外,PAM广泛应用于各种类人类机器人组件[8-12]中。
通常,PAM通过消耗存储在压缩空气中的气动能量来产生用于多个任务的机械驱动。空气通过压缩机被压缩至高压,然后通过空气服务单元从颗粒,油和水蒸汽中净化。压缩空气在通过管道系统供应到PAM之前保持在罐中。这种固有的行为导致由PAM驱动的任何机械系统至少携带内置压缩机或加压罐。反过来,这种空气制备和分配系统的重量大,大的占用空间和噪声操作对于如上所述的可移动仿人类机器人应用造成较小的可行性和适用性。
为了克服这些缺点,提出了对PAM加压的替代技术,用金属氢化物(MH)的吸收/释放。在概念上,MH粉末被认为是氢气的固态储存,其能够吸收和释放大量氢气用于加压。在封闭反应器内,MH粉末中的吸收/释放对集成良好的PAM施加压力。压力的各种工作条件可以通过反应堆内MH的化学过程控制来操控。因此,通过具有高存储容量,重量轻和紧凑的氢驱动MH来控制PAM致动器是值得关注的。
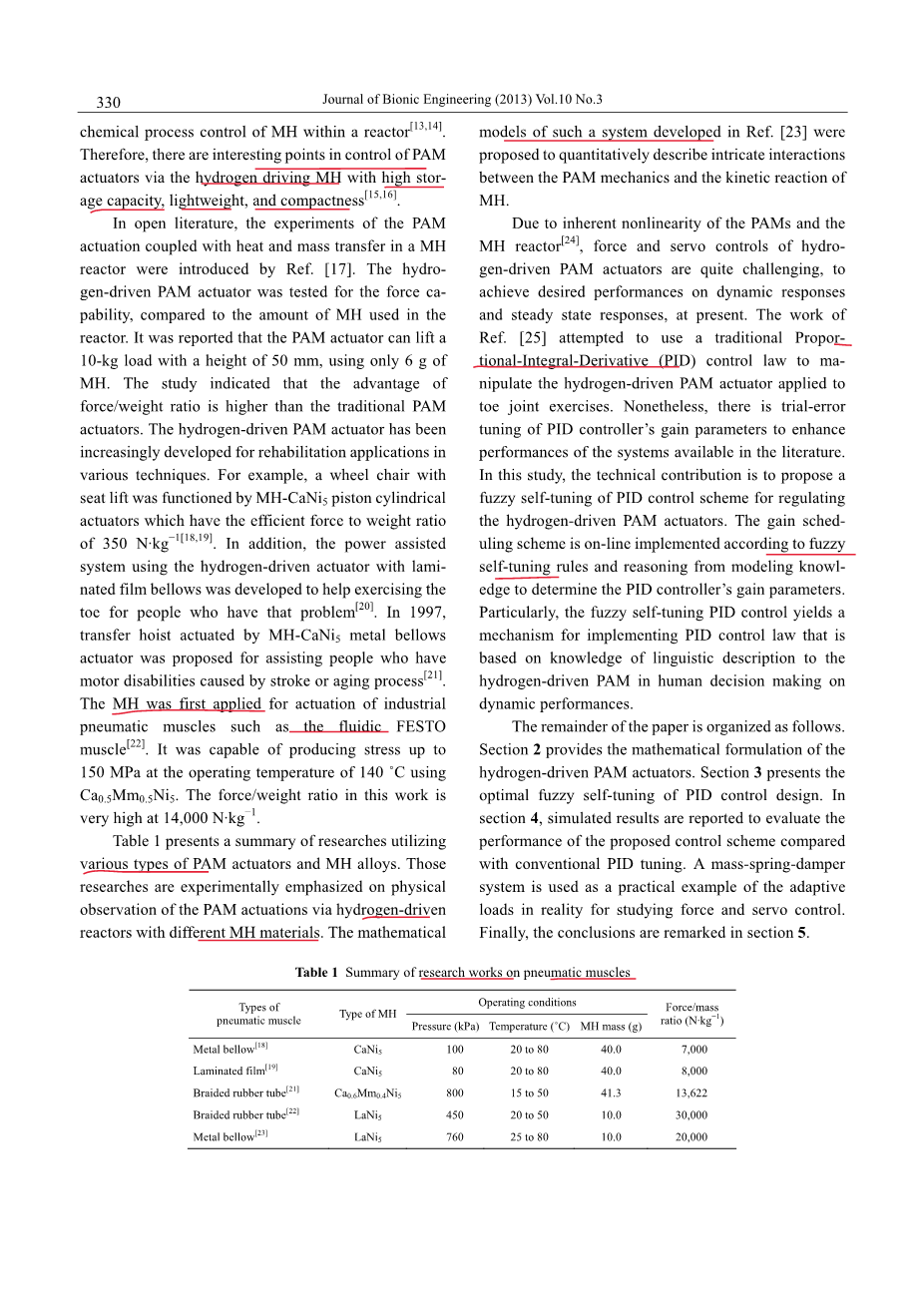
在开放性的文献中,在MH反应器中伴随热和质量传递的PAM驱动实验由参考文献介绍。与在反应器中使用的MH的量相比,测试氢驱动的PAM驱动器的力能力。据报道,PAM驱动器可以使用仅6g的MH来提起高度为50mm的10kg负载。研究表明,力/重量比的优势高于传统的PAM执行器。氢驱动PAM驱动器已经越来越多地用于各种技术中的康复应用。例如,具有座椅升降功能的轮椅由具有350的有效力重比的MH-CaNi5活塞圆柱形驱动器构成。此外,使用具有层压膜波纹管的氢驱动驱动器,开发功率辅助系统以帮助具有该问题的人锻炼脚趾。1997年,由MH-CaNi5金属波纹管驱动器驱动的转移起重机被提出用于辅助由中风或老化过程引起的运动障碍的人。MH首先应用于工业气动肌肉的驱动,例如流体FESTO肌肉。使用Ca0.5Mm0.5Ni5,在140℃的工作温度下,它能够产生高达150MPa的压力。该工作中的力/重量比非常高,为14,000。
表1提供了使用各种类型的PAM驱动器和MH合金的研究的总结。这些研究在实验上强调了PAM驱动器通过使用不同MH材料的氢驱动反应器的物理现象。这种系统的数学模型在参考文献 [23]中提出PAM力学和MH的动力学反应之间复杂的相互作用的定量描述。
由于PAM和MH反应器的固有非线性特性,通过氢驱动PAM驱动器的力和伺服控制以实现期望的动态响应和稳态响应的性能,是相当具有挑战性的。参考文献[25]的工作是试图使用传统的比例-积分-微分(PID)控制规则来操纵应用于脚趾关节锻炼的氢驱动PAM驱动器。尽管如此,仍使用了PID控制器的增益参数的试差调节以增强文献中系统的可用性能。在本研究中,技术贡献是提出一种模糊自调谐PID控制方案,用于调节氢驱动PAM驱动器。增益调度方案根据模糊自调整规则在线实现,并且从建模知识推理以确定PID控制器的增益参数。
模糊自调节PID控制产生了一种用于实现PID控制规则的机制,该控制规则基于在人类动态性能决策中对氢驱动PAM的语言描述的知识。
本文的其余部分组织如下。第2节给出氢驱动PAM驱动器的数学公式。第3节介绍了最优模糊自调谐PID控制的设计。在第4节中,报告仿真结果与常规PID调谐相比,以评估所提出的控制方案的性能。质量-弹簧-阻尼器系统被用作现实中研究力和伺服控制的自适应负载的实际示例。最后,结论在第5节中说明。
2基于MH系统的PAM驱动器的数学建模
为了完整性,本节简要介绍了与MH反应器耦合的PAM机械驱动的数学模型。在概念上,PAM用作气动收缩驱动器。在这项工作中,通过调节PAM的封闭体积内的氢气的量使PAM产生机械致动。为了完成该任务,将PAM设计成与MH反应器结合。MH是金属,其已经结合氢原子,并且能够根据操作条件的变化释放相当多的氢原子,反之亦然,如式 (1)
(1)
其中M是吸氢金属,是反应热量,是氢气,T是温度,P是压力,alpha;是氢-平衡系数。
对于应用来说,在图1中可以清楚地看到,PAM内的氢气的压力可通过增加/减少氢气的量来调节。如图1a所示,随着MH反应器内的温度升高,热量通过MH反应器输入。嵌入在MH中的氢原子释放过程中释放为氢气。该行为导致PAM内部的氢气压力增加的操作条件的改变。另一方面,热量从MH反应器泵出,如图1b所示。在吸收过程中,氢气从MH反应器内的PAM吸收到MH表面。因此,PAM内的氢气的压力降低。PAM的伸长发生。
图2显示出了在机械驱动期间PAM的运动学定义 在状态1中,PAM在大气压下具有正常长度。在没有任何牵引负载的情况下,随着PAM的长度在状态2缩短到未拉伸长度,PAM内的压力增加到更高的压力。一旦通过牵引负载F将PAM从状态2转换到状态3,PAM的长度从未拉伸长度增加到具有增量的瞬时长度L,这是所谓的拉伸长度。
通过研究PAM驱动的实验结果,导出经验方程来控制拉力到PAM内的表压力与拉伸长度之间类似弹簧的关系。
(2)
其中F是由PAM针对负载产生的拉力,K是PAM的刚度参数,其是表压和拉伸长度的函数。例如,本研究中使用的工业PAM的参数列于表2中。
从力/伺服控制的观点来看,PAM内的压力被适当地调节以实现机械驱动的性能目标。然而,PAM内的压力取决于由状态方程确定的氢气的量。
(3)
通过应用PAM能量守恒原理 [23],PAM的动态行为受制于
(4)
其中P是PAM内的绝对压力, 是压力变化率, 是PAM体积内氢气质量的变化率,包括反应器V的体积。是封闭控制系统体积的变化率,T是氢气的绝对温度,k是比热容,R是氢的气体常数。
从公式(4),可以注意到,PAM内的氢气的变化速率等于通过MH反应器中的吸收过程或释放过程进入或离开PAM的氢气的质量流率。进而,氢的质量流率是用于机械驱动的主要受控变量。它由动力学反应模型描述[10]。
对于吸收,
(5)
对于释放,
(6)
在等式 (5)和(6),和分别是吸收和释放的材料相关常数;和分别是吸收和释放过程的活化能值;是通用气体常数; 是平衡压力;是MH中氢原子的饱和质量。
平衡压力由van#39;t Hoff方程[13,28]给出
(7)
和(8)
其中是氢气与MH的摩尔比,是反应热, 是材料相关的参考温度,a是多项式函数的系数,i是多项式函数的阶,n是多项式函数的最高阶。
通过对绝缘良好的MH反应堆应用能量平衡的原理[23],温度T 1的变化率 可以确定
(9)
其中是MH的质量,是MH恒压下的比热,是恒定体积氢气的比热,是氢气的分子摩尔数,Q是向MH反应器的热传递速率。
在等式 (9)中显然可以看出,热输入可以用于调节在吸收或解释放过程中的氢化物形成速率,使得等式(4)中的PAM内的氢气压力具有遵循位置或力控制要求的期望的功能。在这个研究中,热系统的行为可以通过在热电模块和MH反应器之间发生热传递来实现,如图3所示。为了控制MH反应器上的加热/冷却效果,热电模块可以附接到MH反应器的热壁。当电压施加到热电模块时,热泵/制冷效果根据电压极性简单地产生。
热量被泵送到MH反应器,热量被排出到周围环境,分别如图3a和3b所示。
(10)
(11)
和 (12)
其中是热电模块上的输入电压,是热电模块的塞贝克系数,是热侧的温度,是冷端的温度,r是热电模块的电阻,是热电模块的热导率。
参见图3a,由热电模块送出的热通量通过MH反应器壁从热电模块的热侧传递到MH反应器中,以便引起MH反应堆中的释放过程。从而氢原子从MH释放为MH反应器内的氢气。如图3b所示,电压源的极性反转。由于热电模块将MH反应器内部的热量排出到周围环境,MH反应器内的温度降低,冷却MH反应器。在吸收过程中,氢原子键合回MH。
3模糊自调谐PID控制器设计
如第2节所述,PAM与MH反应器和热电模块具有不同的参数和固有的非线性,如何控制这样的PAM是目前新颖和具有挑战性的。在这项工作中,直接应用模糊自调谐PID控制来实现氢驱动PAM致动器的性能目标。图4中给出了控制系统设计的框图。使用控制器以便通过调节热电模块的电压输入来控制氢驱动的PAM驱动器。实际输出x,例如。测量拉力和PAM的一个移动端的位置,以便与期望输出进行比较。通过应用控制律来调整基于MH的PAM驱动系统的电压输入,找到期望输出和实际输出之间的差值e。
PID控制律v执行比例,积分和微分运算,被广泛实现,如等式 (13)所示
(13)
其中是比例增益,是积分增益,是PID控制律的微分增益,t是时间。
实际上,PID增益近似由基于系统在给定操作条件下的瞬态阶跃响应的齐格勒 - 尼克尔斯调谐方法确定[30]。该方法可以产生PID增益的初始估计。 然而,对于由MH反应器在各种操作条件下驱动的PAM的最佳动态性能,还需要对PID增益进行微调。表3指示当每个增益的值增加时,PID增益对动态性能(例如上升时间,过冲,稳定时间和稳态误差)的影响。反过来,PID增益调整的权衡需要一种系统的微调方法,如实时控制实现,其建议如下。
为了在动态响应中获得性能目标,通过调整PID增益
(14)
(15)
(16)
其中,和是比例增益,积分增益和微分增益的初始估计值,,,分别是PID的调整增益。
模糊自调谐PID控制的框图如图5所示。基于模糊规则进行调整的决定,通过接收误差e和误差e的变化率实现模糊自调谐模块。在这项工作中,设计的规则是根据由MH反应堆驱动的PAM的主要特征定义的,其是慢响应和迟滞非线性,如下一节所讨论的。进行模糊化,模糊规则库和最大-最小推理机制,以及基于解模糊的Mamdani模型[31,32],以调整方程式中,和的PID增益。 (14)〜(16)。
为了便于理解,误差、误差变化率,PID系数增益的模糊集合的数值示例在图6和图7中定义。误差和误差变化率被模糊化为具有语言变量的模糊集:零(ZE),正小(PS),正中(PM),正大(PB),负小(NS),负中(NM)和负大(NB)。
为了实现最大-最小推理机制,自调谐模块的模糊规则在表4,5和6中列出。它们被解释如下
在上述模糊规则中,i,j,k是索引,和是误差和误差的变化率的输入语言变量,,和分别是调节的比例增益,积分增益和微分增益的输出语言变量。
因此,通过重心技术获得用于PID增益调节的模糊推理结果,如等式6中所写(17)〜(19)。其中:是最小运算符,是最大运算符。
图8显示了模糊自调谐模块的PID增益的调整。 正如预期,可以从弯曲表面观察到,PID增益调整的函数相对于误差和误差的变化率的输入变量是非线性的。 对于给定的e和,比例增益,积分增益和微分增益的初始估计实时地以,和的幅度改变,使得基于模糊规则的系统动态性能令人满意。
4结果与讨论
本节将通过模糊自调节PID控制来演示氢驱动PAM的驱动方案的示例。图9中显示出了控制系统的示意图。在本研究中使用FESTO-流体肌肉DMSP / MAS的工业PAM。PAM的机械结构由具有公称直径为1cm和长度为7.5cm的钢纤维
全文共7388字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144631],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

