英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
2011年8月28日至9月22日,意大利国际自动控制联合会第18届世界大会
起重机负载位置观测器陀螺仪测量
Ulf Schaper* Conrad Sagert * Oliver Sawodny * Klaus Schneider **
德国斯图加特大学系统动力学研究所
电子邮箱:ulf.schaper@isys.uni-stuttgart.de
摘要:在起重机自动化系统中,对负载位置的准确认识是满足定位精度要求的关键因素。本文提出了一种利用陀螺仪测量的港口起重机非线性观测器设计方法。同时考虑了单摆载荷配置和更复杂的双摆配置。在这两种情况下,陀螺仪传感器都安装在靠近顶部绳索悬挂点的绳索上。该观测器被实现为一个扩展卡尔曼滤波器,并与RTK-GPS参考测量结果进行了比较。
关键词:起重机控制,摆锤,双摆锤,观测器,扩展卡尔曼滤波器,陀螺仪
1.介绍
如今,世界各地的港口都使用起重机来处理快速增长的大宗货物、集装箱和普通货物。特别是对于港口起重机,由于锚具价格昂贵,转运过程的持续时间是一个关键因素。因此,航运公司有义务尽可能减少非工作日。吞吐量首先受到起重机操作员在目标位置快速准确定位负载或吊钩的能力的限制。考虑到绳子长度可达120米,一个负载振荡周期可长达22秒。因此一旦需要多次使用,负载定位就会非常耗时。为了解决这一问题,人们提出了许多起重机控制算法。一些作者,如Kim金和Singhose(2010)只关注前馈控制,尽量不激励负载摆动。然而,大多数起重机控制方法使用反馈。这使得起重机控制系统能够应对诸如负载冲击之类的干扰。
为了使用反馈控制,必须知道负载的位置。Sorensen等人(2007)和Danielson(2008)提出使用机器视觉系统进行负载位置估计。因为大多数大型起重机都安装了摄像机系统来帮助起重机操作员。这是一种利用他们的视频信息的实用方法。然而,在室外使用视觉系统是有问题的:在有雾的情况下,负载可能是不可见的,而且某些散装货物(如煤炭)的转运会产生灰尘,影响光学测量设备的可靠性。Kim等人(2004)也认识到基于视觉的解决方案的问题。他们用一个装载在负载上的倾斜角传感器来估计负载的摇摆角。另一些则使用靠近绳子点的传感器来悬挂直接测量绳子的角度。使用电位器的Uchiyama(2009)和Terashima(2007)等人组织在起重臂顶部安装编码器。同样的Knierim(2010)和Masoud(2005)等人将编码器附加到一个经常使用的桥式起重机上。这些方法在中小型应用中工作得很好,但它们不容易应用于大型起重机,因为角分辨率要求随着绳索长度的增加而增加。绳索长度可达120米,容器扭锁尺寸约为3厘米,角度分辨率约为rad。为了满足这些精度要求与经典编码器或电位器,测量传输是必需的。然而当这些设备被连接到起重机绳索上时,它们无法承受振动。因此利勃海尔利勃海尔海港移动式起重机(LHM)安装了陀螺仪来测量负载的摇摆。Neupert等人(2010)发表了一个基于陀螺仪测量的观测器设计。这一研究的主要进展是将惯性坐标系用于建模的负载摆动。这消除了测量臂顶加速度的需要,因此提高了观察器在加速阶段的性能。此外,Neupert等人(2010)提出的观察器由于缺乏参考测量而不能被验证。
除了众所周知的钟摆模型,所谓的“双摆”配置也被考虑在这个项目里。它们是在用另一根绳子把一个轻负载接到吊钩上时形成的,从而形成两个相互作用的钟摆。Kim和Singhose(2010)的研究表明,在这种情况下,起重机的操作变得更加困难。即使是有经验的起重机操作员也试图缓慢地驱动双摆,以避免双摆激励。
本文组织如下:第二节介绍了坐标系,这种选择对于起重机观测器的设计特别重要,因为它消除了测量悬挂点加速度的需要。第3节设计了单摆模型和观测器。然后第4节讨论了双摆模型,使用参考测量来验证两个观察者的性能。
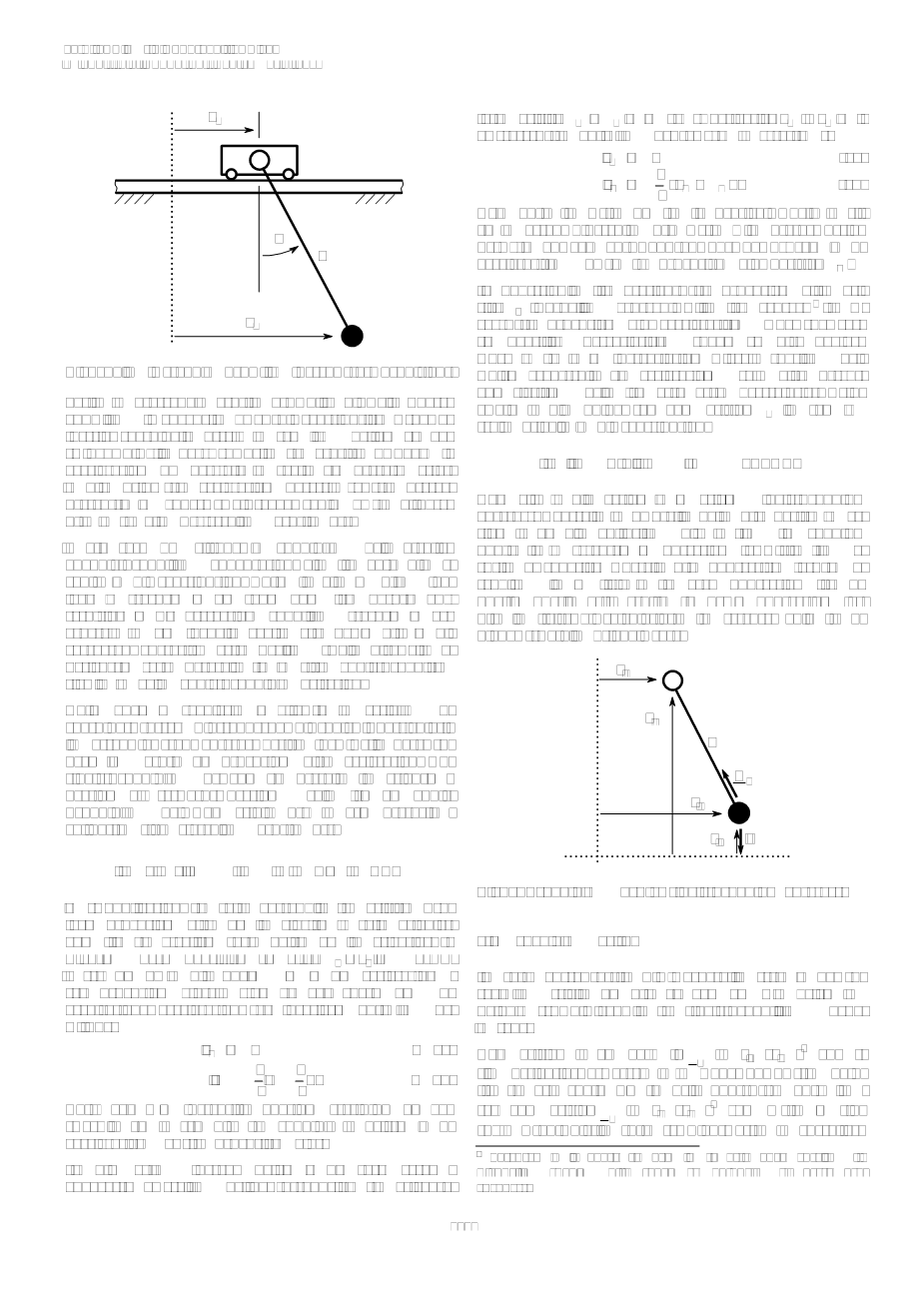
图一:一种利勃海尔港口移动式起 图二:具有不同状态定义的简单起重
重机(LHM),具有各种负载配置 机模型。
(一个吊钩、一个集装箱吊具和一
个壳体抓斗)。
2.坐标系的选择
起重机控制方面的研究多以吊点的位置及其速度作为状态变量,也就是所谓的“绳角”及其导数。再图二中这些量被称为,,,。假设模型输入u为悬点的加速度,I为绳子的长度,g为重力加速度,线性化的动态模型为
|
|
(1a) |
|
|
|
(1b) |
(1b)为描述荷载摇摆的微分方程。从图中可以看出,摇摆是由悬架的加速度u引起的。
本文提出了一种不同的状态向量选择方法。引入水平荷载位置和它的导数,作为状态,动态模型(1)可以重新表述为:
|
|
(1b) |
|
|
|
(2b) |
(1)和(2)的动力学状态是相同的。在观察器的设计上(1b)和(2b)仍然有一个重要的区别:(2b)不依赖于加速度u,而是依赖于悬点位置pA。
在工程实际中,悬点位置通常是可测的,具有较高的精度。然而悬点加速度u并不是那么容易量化的。微分法涉及到两次微分。执行器模型从阀电流和摩擦模型中重构出加速度u,也存在很大的不确定性。注意到这一发现后,负载位置pL在此研究中用作状态变量。
3.单摆观察器
本节的目标是设计一个单摆观测器。与第2节的初步研究相反,主摆动力学的全非线性模型在第3.1节中给出。确定测量方程(3.2小节)后,构成扩展卡尔曼滤波(3.3小节),最后给出实验结果(3.4小节)。为简单起见,所有的计算都只针对平面(二维)情况。
图三:单摆观测器的摆模型 图四:安装在绳索上的陀螺仪。这张照片是在吊杆完全放下的情况下拍摄的
3.1钟摆模型
在起重机控制系统中,通常假定绳索是无质量的,并且载荷可以被建模为一个质点。这就引出了起重机的“单摆”模型。假定悬臂顶部 的位置及其时间导数为已知,绳长l也是如此。通过这些输入,可以使用牛顿-欧拉方法来设置负载位置的动态值(见图3)。使用水平荷载位置作为广义坐标q。总荷载位置可用该广义坐标表示:
|
|
(3) |
可以将载荷速度定义为:
|
|
(4) |
换算为:
|
|
(5) |
|
|
(6) |
同理,载荷加速度可表示为:
|
|
(7) |
其中,,,可以从公式(5)和公式(6)计算出来。载荷质量的牛顿第二定律是:
|
|
(8) |
当负载质量m、重力加速度g和插入(7)的绳索力矢量,并且使用达朗伯原理消除绳索力时,摆动力为:
|
|
(9) |
也可以被认为是微分方程:
|
|
(10) |
模型输入u为吊杆头的位置、速度、加速度以及绳索长度及其时间导数。所有这些量都需要用来评估J和以及公式(9)中这些项的导数:
|
|
(11) |
本模型的一个合理的初始条件是假设载荷垂直于臂顶,q(0) = pA1,且无载荷摆动,。
3.2预期的测量信号
陀螺仪安装在吊杆顶端附近的绳索上(见图4)。一般来说,陀螺仪在其自身固定的坐标系中测量设备的旋转速率。然而,由于只考虑平面问题,物体的固定转动率与惯性转动率相同。因此,旋转率omega;rope是绳角的时间导数(图二)。绳角可以表示为:
|
|
(12) |
假设绳子长度的变化可以忽略,,则理想的测量信号为:
|
|
(13) |
真正的陀螺仪测量包括许多干扰。综合摘要见Grewal和Andrews(2010)。在这种情况下,陀螺仪的主要误差是一个简单(主要取决于温度)的信号偏移,这种偏移是MEMS传感器的一个常见问题,但由于传感器偏移的变化远慢于摆锤动力学,因此不会造成任何问题。一个简单的偏移扰动模型是:
|
|
(14) |
一个重要的测量干扰是高阶弦振动。特别是对于长绳和低负荷质量,起重机绳共鸣就像吉他弦。这些振荡也很容易处理。振动弦的前两个谐波频率是:
|
, |
(15) |
式中,l是绳索长度,Fr是绳索力,mu;是绳索每米的质量,见Dubbel(1994)。高次谐波频率可以用同样的方法计算,但是,在考虑的绳索长度上,高次谐波频率还不占主导地位。由于这些弦振动是正弦的,一个简单的扰动模型是:
|
|
(16) |
|
|
|
(17) |
另一个众所周知的钟摆扰动是风。然而,经验表明即使是大型集装箱风力对起重机的控制也不具有挑战性。因此,即使LHM起重机装有风传感器,该模型也不提供风干扰补偿。
只要不同振子的频率不匹配,所提出的起重机模型是不可观测的。对于LHM起重机,吊钩本身的重量保证了谐波频率远远高于主摆振荡频率,即使对于短绳长也是如此。
3.3观察器设置
扩展卡尔曼滤波器要求将观测器问题表述为:
|
|
(18) |
|
|
|
(19) |
其中是估计的状态向量,u是模型输入,是预期测量。这里,状态向量结合了摆动力学(9)和扰动模型动力学(14),(16)和(17):
|
|
(20) |
式(18)为时间离散形式,式(10)、(14)、(16)、(17)为连续时间形式。因此,它们必须被离散化。扰动模型(14)、(16)和(17)是具有时不变参数的线性模型,因此可以进行离散化分析。然而,为了离散非线性摆动力学(10),需要一个积分方案。当应用于无阻尼振子时,这种积分方案必须是稳定的。改进后的一步罗森布洛克公式符合这些要求。它是隐式的,因此可以用一系列的牛顿迭代来计算解。结果表明,即使没有观察者反馈,一个牛顿的步长也足以产生一个稳定的钟摆运动预测。因此,通过求解线性方程组,可以找到摆的状态预测;
|
|
(21) |
其中是离散化时间,是连续时间摆动力学,且表示的前两个元素。
输出方程(19)不需要离散化,它将理想测量信号(13)与干扰信号模型(14),(16)和(17)结合起来:
|
|
(22) |
利用(18),(19)形式的系统模型,可以重复应用众所周知的EKF预测校正滤波方法。当在时间调用该算法时,取旧的状态估计,并模拟其在离散化时间h上的传播。同时,对系统矩阵进行线性化处理用来预测状态估计的协方差。预测的状态和相关的协方差被称为和:
|
|
(23) |
|
|
|
(24) |
预测估计协方差和输出方程的线性化是用来计算卡尔曼增益的:
|
|
(25)<!-- 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[235168],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

