英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
一种新型无轴承概念电机的设计和尺寸定型关系
Walter Bauer Wolfgang Amrhein
摘要:本文提出一种新型无轴承电机。该电机利用同一个绕组系统同时产生轴向力和力矩。转子磁铁采用一种特殊的磁化模式,可以阻止端部绕组所产生电磁力的抵消,使空心的端部绕组产生轴向力。提出了能够表征电机主要尺寸对其产生力和力矩能力大小的简单分析模型。
关键词:无刷电机,永磁电机,永磁体,控制器,无轴承电机,洛伦兹力,磁轴承
- 前言
过去十年里,无刷电机由于其优良的特性逐渐取代了直流电机。现在,传统的无刷驱动结构依然存在机械轴承的摩擦磨损,这是它们共同的缺点。一个减小摩擦损失的可行概念是利用磁轴承,特别是在电驱动装置中。因为磁悬浮转子的电和机械复杂度很高,所以为了降低应用成本而做的结构简单化研究就变得很有意义。
1.1无轴承驱动的发展现状
无轴承驱动电机种具有综合磁轴承功能的电机,它能减少额外的轴承数量。最常见的无轴承驱动系统的基本发展现状在问下[3-5]中被给出。现有的无轴承电机的重要一类是径向磁通流量类。这种电机能在径向产生力,该力的产生原理在1942年出版的文献[2]中第一次被提出。其实,径向力是由沿着转子圆周方向空气隙磁通弥补分布不均产生的。这个理论已经被全世界的多个研究机构应用到几种基础机械中。在上述被提到的无轴承概念中,有一种是片状电机[9],[10]。转子的位移和旋转由定子背铁的磁阻里来保持稳定。使系统稳定的径向支撑力和驱动力矩由共同的绕组产生。因此,无轴承电机不需要任何额外的轴承,仅仅需要一个能产生支撑力和驱动力矩的绕组系统。
1.2一种新的无轴承概念
为了控制刚性转子在三维空间的位置,六个自由度必须要被限制,可以采用结构设计和控制策略两周方法。任何新型的无轴承电机概念都需要满足所有自由度的限制,同时也要防止结构过于复杂。文献[7]提出了永磁环形支承的使用,是一种非常高效的被动
悬浮。“被动”指的是这种类型的支承不需要额外的电能。悬浮是由吸引或排斥的多个相互作用的电磁力来实现。一个磁悬浮简洁转子的最初模型在文献[8]中被提出,使用了永磁环形支承。这个可行的设计由于永磁环形支承提供径向支承力和抑制了倾斜而得到了应用。当然,补偿环形支承产生的轴向不稳定动力的额外磁轴承是必不可少的。因为产生驱动力矩的部分,被叫做轴向流通式电机。
1.3轴向力/力矩电机
在结构复杂度的最小化和材料使用的最优化的要求下,产生了轴向力/力矩电机的概念。在将轴向力和力矩的产生整合到一个单一的共同绕组系统的研究中,一种新型无轴承电机的感念被提出。采用这种技术的初始原型是设计成一个空心线圈的电机,这是本文的主题。里面和外面的背铁都被安装到转子上一起旋转。这使涡流损耗和磁滞损耗降到最低。表面贴装的永磁铁和外部背铁相连。由于无铁芯也没齿槽的定子设计,所以,在定子和转子间没有磁阻力和转矩波动的产生。如果转子永磁铁是一种特殊的磁化结构,空心定子绕组的端部绕组能用来产生轴向方向的支承力。这种特殊的永磁铁能制止一个单一空心线圈的端部绕组与当采用传统的交互布置的永磁铁相互作用产生的力的消失。还有一项值得注意,一个特殊的绕组分布来使产生的支撑力和驱动力矩分离开,两个量都可以不需要任何不稳定的边缘效应来控制。特别是,转子内在的倾斜不稳定问题必须要通过绕组的选择和设计来解决。
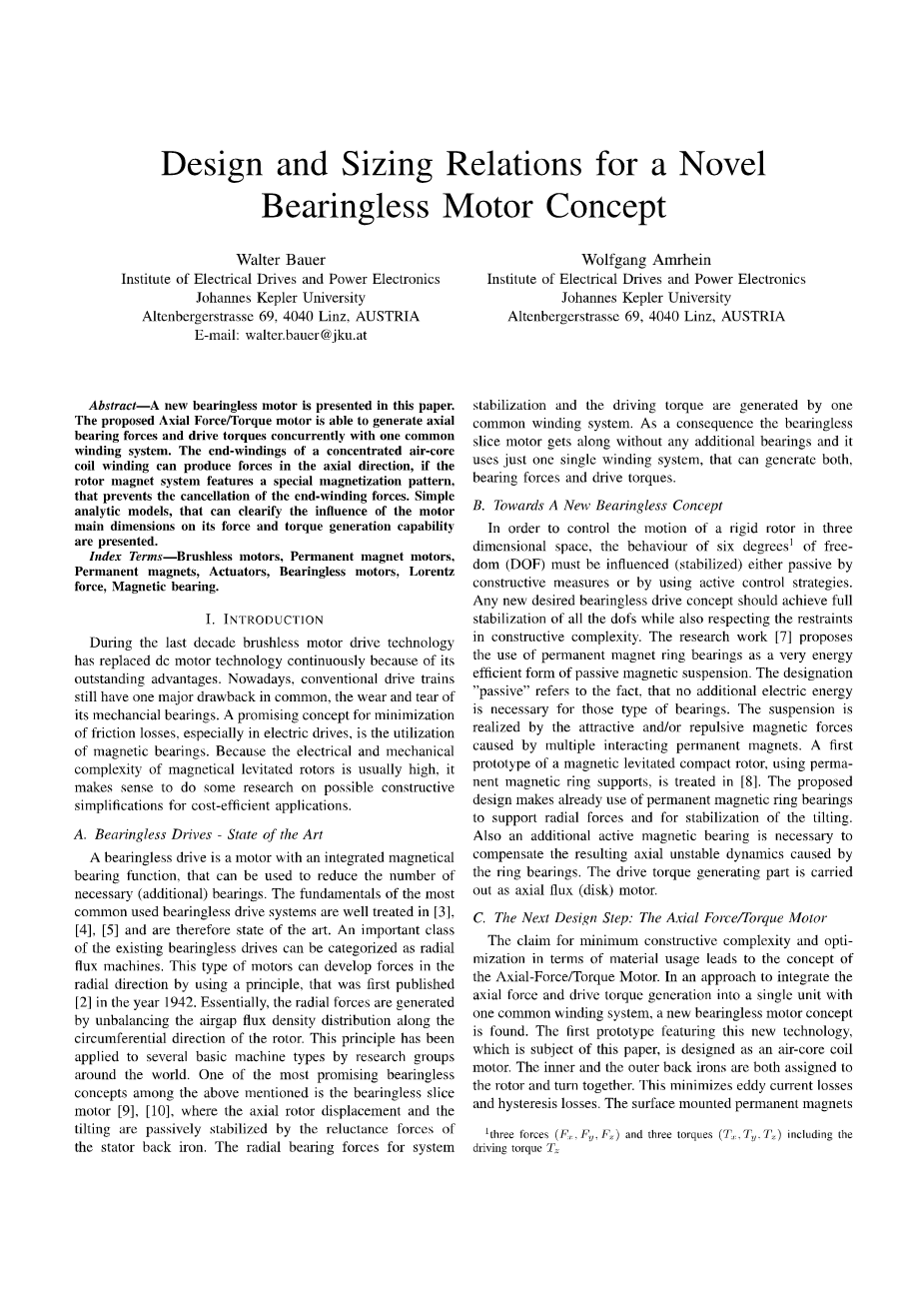
图1 轴向力/力矩电机的驱动概念,图片展示了轴向位置的悬浮转子,用定子来定义坐标系,它表明转子的只信在不平衡点的位移。A和B是永磁环。
- 工作原理
本文提出的驱动结构如图1,包括两个永磁环形支承,可以提供径向磁悬浮{}和磁悬浮系统的旋转稳定{}。刚性转子其余的两个自由度}必须要要被无轴承轴向力/力矩电机控制。
2.1永磁环形支承
一个永磁环形支承包括两个元件,一个定子环和一个转子环。均无铁芯,能够像传统的球形支承一样应用。S. Earnshaw在文献[1]中定义了一个一般的理论,如果所有粒子成员的力场满足平方反比定律,静态稳定的力平衡不能在粒子云中存在。Earnshaw的理论也可以应用到磁场,被广义的扩展[7]。这个理论可以用来描述永磁环布置。因为,其中,表示线性径向刚度系数。是轴向刚度系数。在柱坐标系下理论的在生成产生一个简单的联系轴向和径向刚度系数的关系
(1)
作为一个通用的结果,可以这样认为,由永磁环支承产生的一个大的正刚度导致明显的轴向不稳定。根据等式(1),刚度矩阵的特征,也是刚度系数决定了被动磁悬浮的现象。为了得到需求的径向刚度,永磁环的几何参数能用分析方法计算出来[7],[8]。
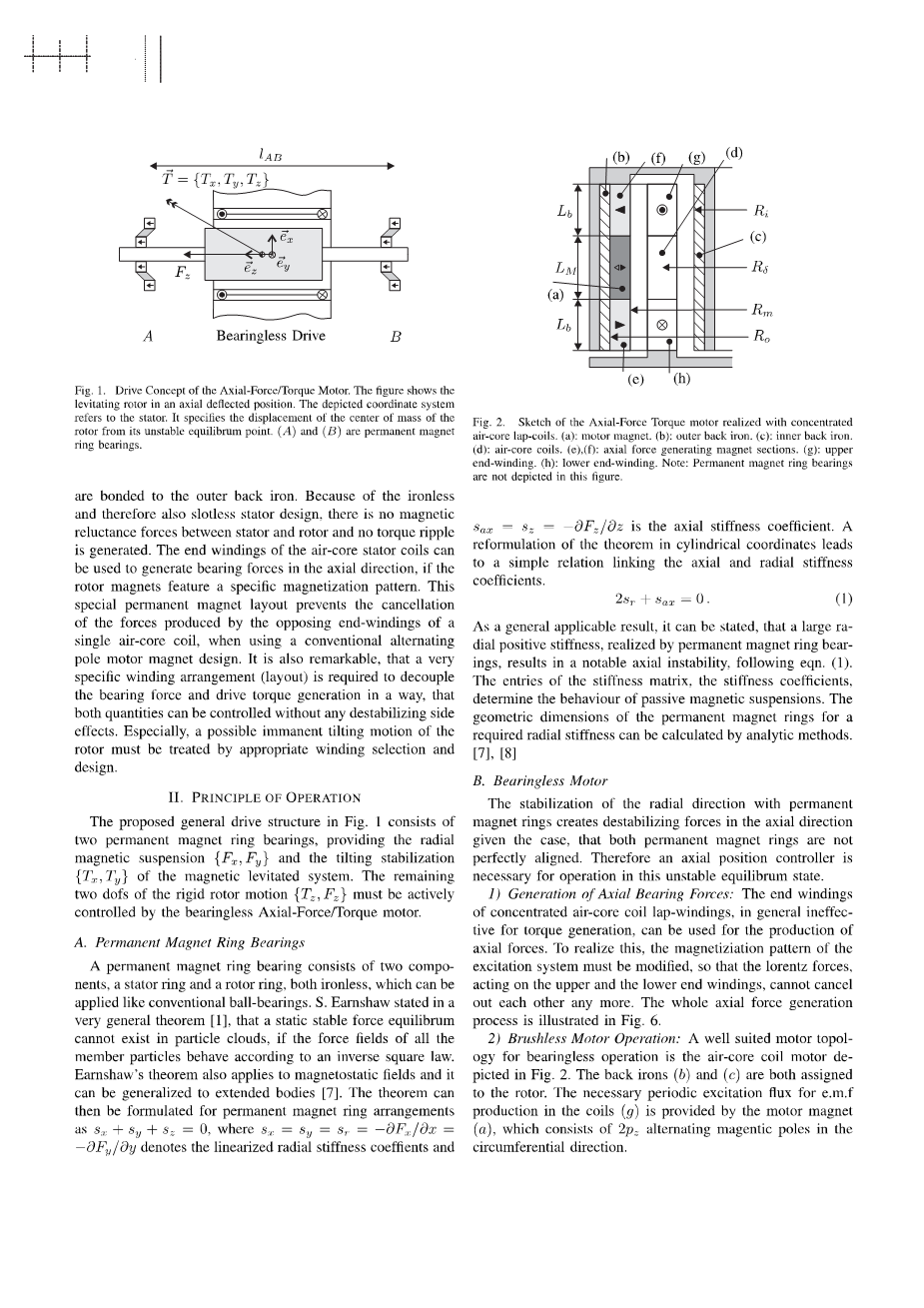
图2 轴向力力矩电机用空心绕组来实现。a):电机永磁体,b):外部背铁,c):内部背铁,d):空心绕组,e),f):产生轴向力的永磁部分,g):上端端部绕组,h):下端端部绕组。注意:永磁环形支承在途中未表述。
2.2无轴承电机
考虑到两个永磁环不可能完全在同一条直线上,永磁环径向的稳定会产生的轴向失稳力。因此,为了解决这种不稳定的平衡状态需要一个轴向位置控制器。
1)轴向支撑力的产生:一般是用来产生转矩的集成空心叠成线圈的端部绕组可以产生轴向力。考虑到此,励磁系统的磁分布模式必须要改进,以使上部和下部的端部绕组产生的洛伦兹力不能相互抵消。整个轴向力的产生过程如图6。
2)无刷电机运行:一个适合无轴承运行的很合适的电机拓补结构是空心绕组电机,如图2 。背铁(b)(c)被固定在转子上。线圈(g)中产生电动势的励磁磁通需要的周期由电机磁铁(a)提供。该磁铁在圆周方向包括2Pz个可选择的电磁极性。
图3 无轴承驱动的电机部分的计算
- 大小尺寸的定型
无轴承电机的三维磁通路径,通过共同的绕组系统,驱动转矩和轴向力的产生之间实现了耦合。最后一项要点是背铁的饱和效应需要耗时间的有限元仿真来明确贯穿整个过程的力和转矩的计算。为了满足设计规范来实现一个优化的设计,数值参数优化是不可缺少的。为了约束仿真运行到其需要的最小值,一些基本的分析量很关键。特别是基本驱动尺寸对力和转矩产生能力的影响是设计目的的重点。
3.1驱动系统径向特性的选择
一个驱动系统需要的径向特性可由确定永磁环支承的几何尺寸来获得。如图1。两个永磁环形支承被安放距离为lAB来保证合适的倾斜稳定性。根据关系(1),虽然驱动的轴向方向变得不稳定。失稳的轴向力可由轴向刚度系数Sax定义,适用于失稳平衡点附近的微小位移。在支承启动部分需要最大的驱动力。
(2)
表示转子不稳定平衡点最大的轴向位移,经常是机械停止的位置。
图 4 由集中绕组产生的驱动转矩。。线圈必须能产生一个沿着转子表面的、平衡的、周期性的、电枢电动势,以产生转矩。是虚拟的电流参数,当它应用到所有线圈绕组中指定的方向时,能产生驱动转矩。是线圈j的电流。
3.2转矩分析
空心绕组产生转矩的部分和表面镶嵌永磁体的转子相互作用,永磁体为径向充磁的钕铁硼,它可以采用一维机性电机模型来模拟[11]。产生的转矩如果是峰值,磁饱和和其他非理想的影响可以被忽略。由于是常见的大气隙绕组电机,电枢反应也能被忽略。电机磁铁的磁动势Fm可以被如下表示
(3)
为剩磁通密度,永磁体的相对磁导率为,空气的磁导率为,平均电磁长度为。磁通量可由下式给出
(4)
永磁体的磁阻为,空气隙磁阻为可由下式定义
(5)
(6)
平均励磁通密度(r)在径向r的气隙可由下式给出
(7)
有效的气隙长度
(8)
其由气隙和磁铁长度的影响组成。可以推导,电机可以根据正弦波负载功能的原理被操作优化。因此,仅是激励磁通密度的基波(7)需要在转矩计算中用到。
(9)
产生的瞬时转矩(t)可以由[6]计算得来
(10)
其中是电枢磁动势的基波。线性电流密度可写成
(11)
绕组因子,每项线圈的匝数,是产生电流元的虚拟转矩。假设一个优化的电流控制角,绕组可获得的最大转矩如图4,可以
表述如下
(12)
里面表示平均气隙量。等式(12)在电机设计领域广为人知。它指驱动力矩和伴随着的电机几何尺寸的关系。电磁负载能被目前的空心绕组电机拓补结构更深的推导出来。考虑到每项绕组的匝数未知,以及在此位置不需要的事实,产生转矩的磁动势峰值可以被推导出
(13)
铜饱和因数为,平均绕组区域如图5描述。铜里的峰值电流密度为。考虑到发热问题,峰值电流密度必须满足.电流负载的基波可以推导出
(14)
指线圈宽度,形状因数可由绕组的结构确定。
(15)
由(7)(8)(3),和空气隙磁通密度分布(9)可以推导出
(16)
考虑到几何尺寸和永磁系统的粒子模式,磁结构因数
(17)
驱动力矩(12)可以由(14)(16)表述为
(18)
将(18)带入气隙量公式,得
(19)
图5 集中绕组的分布,角度减小因数。
表达式(19)被叫做每个转子的转矩量(TRV)或者是空气隙剪应力sigma;。[TRV]=。这个结果不包含峰值,磁饱和度和其他非线性的材料影响。虽然如此,它提供充分的信息来辨别产生有效转矩的关键几个尺寸。等式(19)能被用来性能评估数值参数优化中搜索向量的特征。
3.3轴向力的产生
由于三维空间,轴向力/力矩电机产生轴向力的永磁铁局部磁通量饱和。轴向的洛伦兹力的精确估算变得更加复杂,需要用三维数值方法来解决这个问题。一个基本的分析模型需要包括电机中产生轴向力的基本几何尺寸的影响。由绕组产生的洛伦兹力与在同一条直线上,与电磁场B上的电流可以用下式表示:
(20)
线圈j的平均宽度为。如图6,由于特殊的线圈布置,产生轴向力的端部绕组和产生导体轴向应用的绕组区域可用下式表示
(21)
图6 由集中绕组产生的轴向力。。所有的线圈中通相同的虚拟电流元。由于永磁铁相反的磁性,洛伦兹力由上部和下部端部绕组一起产生。端部绕组中的电流方向不随圆周改变。
机械加工过程中的线圈损失可以用一个角度换算因数来折算,如图5所示。代表绕组区域。指线圈的宽度,指线圈轴向高度。端部绕组径向和轴向分布的导体由一个单一的线圈导体宽度来取代。它被放在rz相端部绕组区域的中心,如图5和6。猜想径向磁场参数沿圆周方向保持不变。这个关系能表示如下:
(22)
(23)
空气隙中的磁感线密度为,平均径向磁通密度参数对轴向力的产生有作用。上部和下部度端部绕组的平均长度可以通过来计算,表明相同线圈的相反端部绕组在型号上不同。绕组的平均洛伦兹力j由两个相反的端部绕组产生,可以表述为
(24)
平均磁场强度是磁场宽度和气隙宽度的函数。这表明,它对径向空气隙的影响很小,在分析中可以忽略。产生的轴向力可以总结如下:
(25)
为了尺寸定型的目的,整个线圈产生的力可以用铜导线中的电流密度再阐述为:
(26)
代入(21)式可得
(27)
上式中
(28)
不受主要尺寸依赖,轴向力的一种性能评估方法是参考它的空气隙周长。
(29)
图8 计算倾斜力矩的力-电流矩阵推导过程。指线圈j的轴向力,包括上部和下部两个端部绕组产生的洛伦兹力。
3.4信号叠加和控制方法
轴向力/力矩控制方法可以由以下变换总结
(30)
关联矩阵V,联系了虚拟电流元和绕组电流。矩阵V根据产生轴向力的参数(虚拟支承电流以及j=1...2)和转矩参数建立。两个特殊参数的本征函数不能保证无轴承驱动的总和整体性能,然而
轴向力和力矩必须要同时保证。
驱动转矩和气隙宽度及磁场宽度的关系。
轴向力和气隙宽度及磁场宽度的关系。
图7 数值仿真结果,参数:,,,,
3.5轴向力/力矩电机的力-电流关系
数值参数优化之后,无轴承轴向力/力矩电机的特性可以如下表述:
(31)
(32)
参数可以是转子位置和应用的虚拟电流元的函数。当前的轴向力/力矩电机的力-电流矩阵可由下式给出
(33)
缩写的以及。如果力-电流矩阵满足条件ker()=0,一个唯一的控制序列可
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146881],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

