
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
欠驱动机械臂的设计与控制
Yoshihiko Nakamura, Member, IEEE, Woojin Chung, and Ole Jacob Soslash;rdalen, Member, IEEE
摘要-非完整约束被用来设计一种仅有两个输入量的可控多关节机械臂。主动件通过齿轮组向从动关节传递速度。该系统具有一个三角形的结构,其中一个转换成链形式提出因此非完整机械手可以被现有的开环或闭环的链式系统控制。机械设计建成,实验结果不仅证明了非完整机械手的用处还提供了其应用方案。虽然以往刊物已提出了非完整系统的概念并发展此理论,但本文提出了非完整系统在可控稳定系统设计领域地位。
关键词:链式,非完整约束,非线性控制,机械臂,欠驱动系统。
介绍
最近,非完整机械系统在机器人和控制工程领域得到越来越多的关注。许多理论成果已经积累成熟,尤其是在无漂移系统中的运用,已成为强大的工具。本文的研究范围是在非线性控制理论的基础上,对非完整机械的定义和发展。
本研究的出发点是从非线性控制理论的背景来探索的可能性,创新和有用的机制。虽然以往刊物已提出了非完整系统的概念并发展此理论,但本文提出了非完整系统在可控稳定系统设计领域地位。
在行位空间的维数高于输入空间的维数时,非完整系统是可控的。得益于非完整系统独一无二的特性,这一理论被应用于两输入的多关节机械手。非完整机械手设计的规则,非线性控制策略的发展和实验验证是主要讨论内容。
有很多十分有趣的非完整机械学问题,例如在[29]和[30]中的完整机械运动学,在[18]和[21]中的物体滚动接触,在[20]和[1]中推动操纵。其他典型的例子如空间机器人在[27]和[44],水下机械在[28]。最近有几个新机械装置的研发运用了非完整约束[31],[9],[51],[19]。非完整机械手的基本概念在[6]中提及,这也是本论文的起点。在非完整系统的许多研究中,作品涉及到轮式移动机器人及其应用程序直接关系到本文。可控性分析显示在[17]和[16]。在[11]和[33]中研究了低维系统的运动规划。另一方面,控制理论方法的基础上,一般非完整系统的微分几何框架。默里和沙斯特里[ 26 ]提出了一个链接的形式,这是一类无漂移的非完整系统的典型形式。的oslash;rdalen显示一个移动机器人拖车系统转换为链接的形式[37],[38]。许多开环控制器提出了无漂移系统包括链接的形式,如[ 26 ]、[ 47 ]、[ 24 ]、[ 15 ]和[ 46]。
其他有用的典型形式,提出了如Goursat正常形式[ 4 ]、[ 25 ]、[ 47 ]和功率表[ 22 ],[ 13 ]。反馈控制器存在着根本性的困难非完整系统的设计,众所周知的Brockett定理[ 3 ]。因此,闭环策略分为几个小组,如稳定的歧管[ 49 ],[ 50 ],时变控制器[ 10 ],[ 23 ],[ 32 ],[ 36 ],[ 45 ],不连续的反馈控制器[ 5 ],[ 2 ]或是结合了2种方法在[40]和[23 ]。
本文组织如下。第二节说明理论非完整机械臂的设计。介绍在Ⅱ-A节非完整齿轮,关节驱动机制是第II-B节,II-C节显示非完整机械臂的非线性运动模型。在第三节中,它示出的运动模型非完整机械臂可以被转换为链形式。机械设计和原型设计部分介绍在机械设计中的各种问题进行了讨论在第IV-A节,IV-B节为说明的分析和计算非完整齿轮的驱动力向实用化应用。原型的非完整机器人介绍部分在IV-C节。一些实用的控制方案包括两个开环的和反馈的建议在第五节。利用所提出的控制方法,给出了实验结果所制作的原型。最后,结论性意见在第六节。
II.非完整机械手的设计
- 非完整摩擦轮
轮式移动机器人的非完整约束由轮胎与地面之间的滚动接触产生。为了驱动机械臂,设计一些机器人机械手内的非线性力学元件。为了传递速度,我们设计了一个齿轮如图1所示。
图1.非完整齿轮的说明。
齿轮的基本组件是一个半径为R的球体和两个轮子IW和OW,分别作为输入轮和输出轮,半径为ri和ro。仅仅是轮子的点接触形成球的速度约束。输入轮绕固定轴ai以给定角速度rho;使球旋转。假定输入轮IW与球之间无滑移,球会带动轮OW绕轴ao旋转。轮IW与球的接触点在球北极点,轮OW在赤道上,轴ao在赤道平面上。轴ai与ao的夹角为alpha;。
球和轮接触并无滑动旋转,滚动的约束是不够确定球的旋转运动。球的旋转有两个自由度,球的旋转轴在过轮轴和球心的平面上,我们称此平面为约束面。如果球体与两轮接触于不同的约束面,那么球的旋转只有一个自由度。当轮的轴线固定,球绕两个约束面的交线旋转。在此布局中,球的旋转轴A平行于ai且过球心。当输入轮IW以速度rho;旋转,球旋转的角速度Omega;为:
(1)
输出轮OW的角速度为:
(2)
结合式(1) 和式(2)得出:
(3)
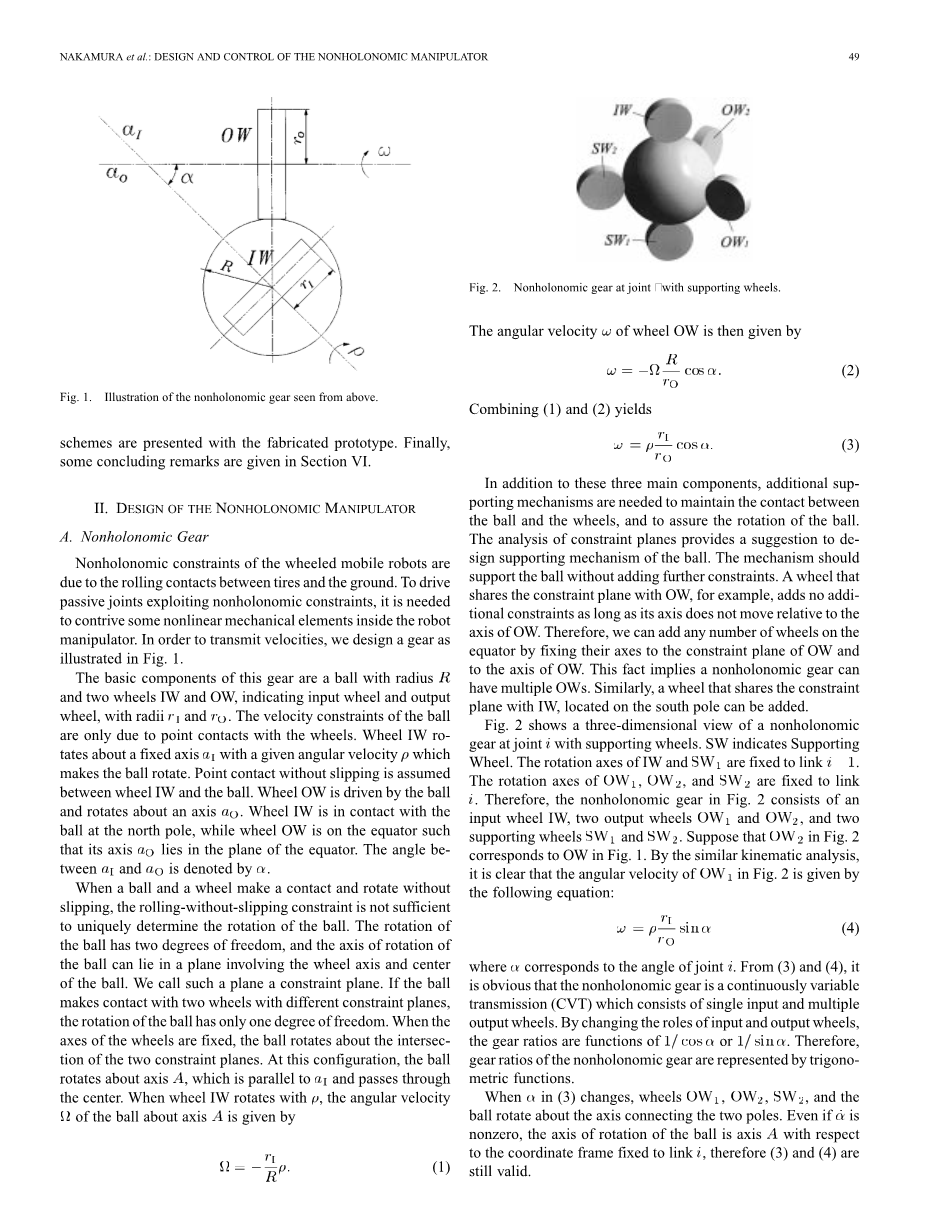
除了这三个主要组成部分,额外的辅助机构是必要的,以保持联系球和轮子,并保证球的旋转。约束面的分析为辅助机构的设计提供了支持。机构不能为球体增添额外的自由度
一个与输出轮共约束面的轮只要它的轴和OW轴不发生相对移动就不会增添额外的自由度。因此,我们可以在球体的赤道线上添加任意数量的轮子,只要轮轴线与OW的约束面和OW轴线位置固定。这一事实表明一个非完整摩擦轮可以拥有多个输出轮OW。同样的,与输入轮IW共约束面,位于南极点的轮也可以添加。
图2 带辅助轮的多关节非完整摩擦轮
图2展示了多关节辅助轮的非完整摩擦轮的三维图:SW为辅助轮,IW和SW1的旋转轴固定link i-1。OW1,OW2和SW2固定link i。因此,图2所示的非完整摩擦轮由一个输入轮IW,两个输出轮OW1和OW2,还有两个辅助轮SW1、SW2。假如图2 中的OW2与图1中的OW一致,根据相似的运动学分析,可以明显给出图2中OW1的角速度有以下关系:
(4)
其中alpha;是关节i的夹角。从(3)和(4)中可知,非完整摩擦轮是一个单输入多输出的无级变速器(CVT)。通过交换输入输出轮,传动比为或。因此,非完整摩擦轮 的传动比是三角函数。
当式(3)中的alpha;改变,轮OW1,OW2,SW2和球体绕着连接两极的轴旋转。即使alpha;是
非零值,球的旋转轴依然相对link i固定,所以式(3)和(4)仍然成立。
B.非完整机械手的关节驱动
假定在上一节提出的摩擦轮的位置在关节1出。我们用一个输入轮IW1两个输出轮OW1,1和OW2,2。注意,非完整齿轮是用来作为一个速度由单输入和多输出组成的传输轮子。IW1的轴ai,1固定,位于link1上OW1,1和OW2,1的轴与alpha;i,1的夹角有,。我们把OW1,1和OW2,1的角速度定义为omega;1,1和omega;2,1,关节1的角速度u1,输入轮IW1的角速度为u2:
, (5)
通过使用机械传动装置,例如,轴和齿轮或皮带和滑轮,OW2,1驱动第二关节:
由于,eta;2,2是传动比,我们为了简化假设OW1,1和OW2,1有相同的传动比rO,1。
通过输出轮OW1机械传动,确定相似结构的关节2的运动,IW2的角速度rho;2为:
由于alpha;1,1=theta;1,eta;1,2是传动比。我们得出关节i(iisin;{1,hellip;,n-2})的关系如下:
(6)
(7)
在连续的关节之间的耦合说明在图3。
平面非完整机械臂的四个例子如图4所示。
图3.关节i-1上非完整齿轮的位置
图4.四关节机械臂及其传动系统的图示
对旋转接头的轴的方向可以是任意的关于一个关节的轴设计的机械适当的接头之间的传输。因此,机械臂不限制平面。
C.非完整机械臂的运动学模型
除关节角度之外,关节n-1的OW的方向称为,也加入运动模型中。通过控制参数,非完整机械臂的运动模型可转换为链式的。不是控制输出量,详细内容会在第五章给出。因此n维运动模型就有n-1个关节。
从式(5)到式(7)再加上,可得出下列配置空间的运动模型:
(8)
, iisin;{2,hellip;,n-1} (9)
(10)
那么eta;1,1=1.
值得注意的是,该运动模型具有类似的结构作为汽车与n-3个挂车的运动学模型,但是不相同。角度theta;1可以被认为是转向角,theta;n-1和可以被认为分别是最后一节的y轴和x轴。
系统的非完整约束是由于滚动球和车轮之间的接触。第n-2个关节空间的约束由式(8)到式(10)可以得出:
另一种运动规律由式(8)到式(10)可以得出:
在这个公式中:
在和
通过设置配置变量,
运动模型可以表示使用输入向量作为
方程:
在这个公式中
III.链式转换
A.三角结构和链式转换
为了控制非完整机械手的运动模型(8)-(10)将被转换成一种隐含的形式现有的控制律可应用于链式。带有挂车的汽车运动模型转换在[ 37 ]和一个指数在[ 39 ]中提出了收敛稳定剂。链式形式介绍了[ 26 ]。这里考虑的链式形式通过:
将运动模型转换为一个链接的形式,我们关于三角变换的定理系统变成一个链接的形式。首先,表示
定理1:若有一个无漂移,两输入的系统
在公式中是一个光滑函数。假设x=p在
然后,坐标变换z=h(x),输入反馈变换v=g(x)u
在公式中iisin;{2,hellip;,n-1}而且hn(xn)是任意光滑函数
B.非完整机械臂的链式转换
非完整机械臂的运动学模型(8)(10)可由下列表格表示:
该系统具有结构为(23)。从定理1,它如下(8)-(10)是可转换为链形式。
推论1:(8)-(10)的运动模型在子空间theta;iisin;(-(pi;/2),(pi;/2)),iisin;{1,hellip;,n-1}可转换为链式(25)-(29)给出的坐标转换和输入反馈转换
和
证明:(30)-(32)中的修改运动模型在theta;iisin;(-(pi;/2),(pi;/2)),iisin;{1,hellip;,n-1}成立。然后结果遵循定理1和(30)-(32)
很容易得出结论,在(30)-(32)的运动模型没有控制参数phi;不能被转换为链形式。虽然它有一个三角形的结构,如在(21)-(23),(24)的情况不能满足。此外,参数phi;在控制器设计中起到了重要作用,此内容第v-c章讨论。lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146256],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

