
英语原文共 75 页,剩余内容已隐藏,支付完成后下载完整资料
第四章 桁架
4.1前言
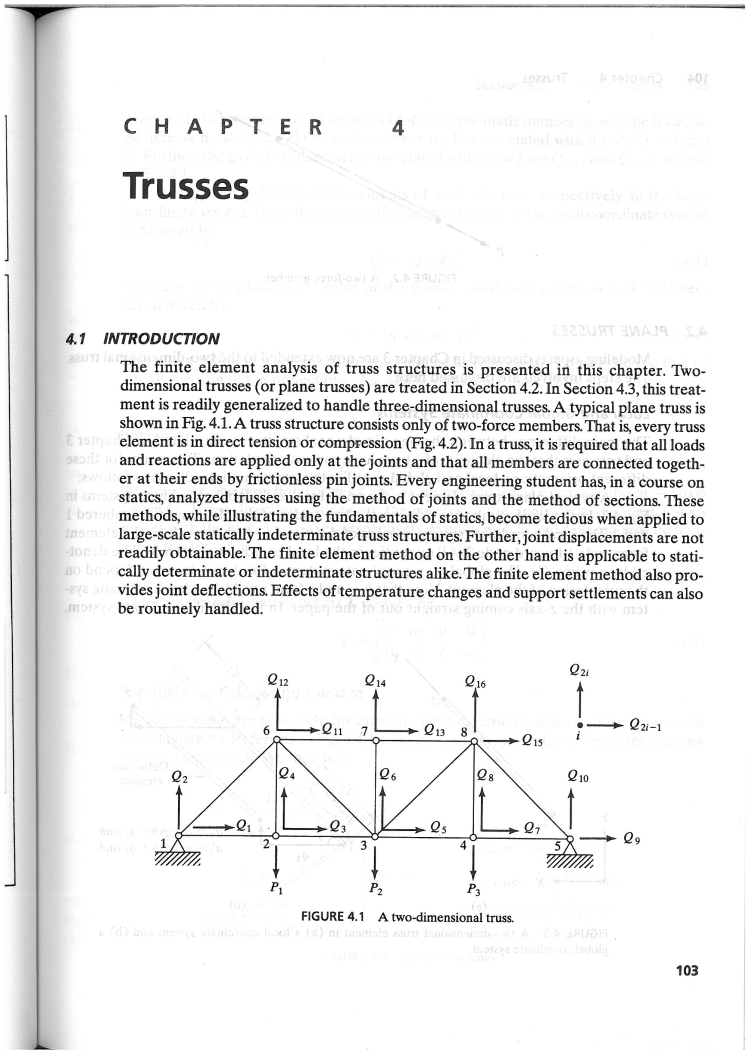
本章所介绍的内容为桁架结构的有限元分析。4.2节所介绍的内容为解决二维桁架(或平面桁架)问题的处理方法。4.3节介绍的内容为将这种解决办法很容易地运用到处理三维桁架问题。图4.1所示为典型的平面桁架结构。一桁架结构仅由两个力部件组成。也就是说,每个桁架元件都处于直接张力或压缩状态(图4.2)。在桁架中,要求所有荷载和反作用力仅作用在接头处,并且所有构件在其末端通过无摩擦的铰支连接在一起。每一个工科学生在静力学课堂上都使用过节点法和截面法分析桁架。这些方法在说明静力学的基本原理的同时,当应用于大规模静态不确定的桁架结构时,变得相当复杂。另外,节点位移不容易获得。另一方面,有限元法适用于静态确定或不确定的结构。有限元法同样也可以求得节点位移。温度变化和支座的影响也可以常规地处理。
图4.1二维桁架结构
图4.2二力杆件
4.2平面桁架
现在将在第三章所讨论的建模的方法延伸到二维桁架。下面将讨论具体步骤。
局部和整体坐标系
和一维结构最主要的不同点已在第三章进行了讨论:杆件是桁架结构的基础,具有各向方向性。为了考虑这些不同的方向,下面将介绍局部和整体坐标系:
如图4.3所示,一个在局部和整体坐标系下的典型的平面桁架结构。在局部坐标系中,单元的两个端点分别编号为1和2.在局部坐标系中,xrsquo;轴沿着单元从1指向2.局部坐标系中所有物理量都应标记符号(rsquo;)。整体坐标系中的x轴,y轴是固定的,不由单元的方向决定。值得注意的是x轴,y轴以及z轴都遵循右手坐标法则,z轴垂直纸面向外。在整体坐标系中,每个节点都有两个自由度。这里采用了一个系统的标号方案:整体标号为j的节点,其自由度为2j-1和2j。另外,节点j整体位移为Q2J-1和Q2j,如图4.1所示。
图4.3 一个二维桁架单元(a)局部坐标系(b)整体坐标系
在局部坐标系中,节点1和节点2的位移为q1lsquo;和q2rsquo;。因此,在局部坐标系中位移单元矢量被记为:
(4.1)
在局部坐标系中单元位移矢量为一个(4times;1)矢量矩阵
(4.2)
下面是qrsquo;和q之间的关系推导:在表4.3b中,已知q1rsquo;等于q1与q2投影到xrsquo;轴分量的和。因此:
(4.3a)
同样地,
(4.3b)
这里,介绍方向余弦l和m,l=costheta;和m=cosphi;(=sintheta;).这些余弦是局部坐标系中xrsquo;轴与整体坐标系中x- ,y-轴之间的角度余弦。式4.3a和式4.3b可以写出矩阵形式
(4.4)
其变换矩阵L为
(4.5)
L和m的计算公式
L和m的节点坐标可以由简单公式直接算得l和m的余弦。根据图4.4,节点1和2的坐标分别为(x1,y1)和(x2,y2)。我们可以得到
图4.4 方向余弦
(4.6)
可得到Le的长度
(4.7)
式4.6和4.7可由节点坐标获得,可通过计算机程序计算得到。
单元刚度矩阵
我们观察可得到一个重要结论:从局部坐标系来看,桁架单元为一维单元。这一结论可以用我们以前在第三章得出的针对一维单元的结果。因此,从式3.26中,在局部坐标系中一桁架单元的单元刚度矩阵为:
(4.8)
其中,Ae为单元的横截面积,Ee为杨氏模量。目前所需解决的问题是推导得到在整体坐标系中单元刚度矩阵。其可通过考虑单元应变能来得到。下面给出了在局部坐标系中的单元应变能
(4.9)
把qrsquo;=Lq代入式4.9,得到
(4.10)
在整体坐标系中的应变能可以写成
(4.11)
其中k 在整体坐标系中为单元刚度矩阵。通过以前的公式,我们可以得到在整体坐标系中的单元刚度矩阵
(4.12)
把式4.5中的L和式4.8中的krsquo;代入,得到
(4.13)
单元刚度矩阵是组装的以通常的方式来获得的结构刚度矩阵。这个组装过程见例4.1。直接由单元刚度矩阵通过计算机计算得到的整体矩阵的带状和天际的解决方案在4.4节中体现。
K=LTkrsquo;L 的结果推导依据Galerkin变分原理。虚位移Psi;rsquo;得到的虚功delta;W为
(4.14a)
由Psi;rsquo;=LPsi;和qrsquo;=Lq,得到
(4.14b)
应力计算
通过注意在局部坐标系中桁架单元是一简单二力杆件可获得单元的应力表达(图4.2)。因此,一桁架单元的应力sigma;为
(4.15a)
因为应变ε是单位初始长度的变化量,
(4.15b)
在整体坐标系中通过变幻式qrsquo;=Lq可以将等式写成另一形式
(4.15c)
将式4.5中的L带入,可得
(4.16)
通过有限元式子获得的,一旦得到位移,每个单元的应力可通过式4.16得到。注意,正应力表示单元受拉,负应力表示单元受压。
例4.1
考虑图4.1a所示的一四杆桁架结构。已知所有单元E=29.5times;106psi,Ae=1 in.2完成下列问题:
- 确定每个单元的刚度矩阵。
- 组装得到整个桁架的结构刚度矩阵K。
- 通过消元法得到节点位移。
- 得到每个单元的应力值。
- 计算反作用力。
图E4.1
解答
- 建议以表格的形式表示节点坐标和单元信息。节点坐标表示如下:
单元连接表为
注意:用户可以自己定义单元连接的关系。比如,单元2 的连接可以定义为2-3而不是上表中的3-2。但是,计算方向余弦必须和所采用的连接关系一致。通过式4.6和4.7,联合节点坐标和所给单元的关系信息,可获得方向余弦表:
比如,可得单元3的方向余弦为l=(x3-x1)/le=(40-0)/50=0.8和 m=(y3-y1)/le=(30-0)/50=0.6。现在,通过式4.13,单元1的单元刚度矩阵为
K1表明单元1的整体自由度与节点1和2有关。图E4.1a所示为整体自由度和将用于组装的单元刚度矩阵。
单元2,3和4的单元刚度矩阵为
(b)结构的刚度单元矩阵K可由单元的刚度矩阵组装得到。通过叠加单元的刚度贡献,注意单元间关系,得到
(c)计算边界条件需对上式所给的结构刚度矩阵进行修改。第三章所讨论的消元法将在这里运用。由于固定支撑对应于自由度1,2,4,7和8,将K矩阵中所对应的相关行和相关列进行删除。缩减后的有限元式为:
求解方程组,得到位移值为
因此,整个结构的节点位移矢量可写为
(d)每个单元的应力可由式4.16确定,如下所示
单元1的关系为1-2.因此,单元的节点位移矢量为q=[0,0,27.12times;10-3,0]T,和式4.16得到
杆件2的应力为
同理,可得
sigma;3=5208.0psi
sigma;4=4167.0psi
(e)最后一步为确定支座反力。我们需要确定对应于固定自由度1,2,4,7和8方向上的支座反力。把Q代入初始得到的有限元方程R=KQ-F中,就可求得这些值。在代入过程中,只需要用到K 矩阵中与前面所说的自由度相对应的各行,而且对于这些自由度,有F=0,从而,我们有
结果为
包含支座反力与外加荷载的桁架结构的自由体受力状况如图4.1.(b)所示
温度效应
在这里我们考虑热应力问题。因为在局部坐标系中看,桁架结构只是简单的一维单元,在局部坐标系中单元温度荷载为(见式3.103b)
(4.17)
其中由温度改变引起的初应变ε0为
(4.18)
其中alpha;为热膨胀系数,Delta;T为单元内的平均温度改变量。可能需要注意是初应变ε0会由于制造误差而把杆件强制装入过长或过短位置的装配过程中而改变。
在整体坐标系中,我们用式4.17表示荷载矢量。因为无论是在局部还是整体坐标系中测量,与此荷载相关的势能是一样的,有
(4.19)
其中theta;为荷载矢量砸整体坐标系中。把qrsquo;=Lq代入式4.19,可得
(4.20)
和左右两边式子比较,可得
(4.21)
把式4.5中的L代入,我们可以写出单元温度荷载的表达式为
(4.22)
温度荷载与其他外部荷载一起,以通常的方式组装到节点荷载矩阵F中。一旦求解有限元方程的得到的位移值,每一桁架单元的应力可由下式计算得到(见式。3.100)
(4.23)
利用式4.16,单元应力方程可简化。注意ε0=alpha;Delta;T,可得
(4.24)
例4.2
同样考虑例4.1中的四杆桁架结构,但是荷载不同。取E=29.5times;106psi和alpha;=1/150000per 0F.
-
杆2和杆3温度只增加50°F(图4.2a)。结构无其他荷载。求解因温度升高而引起的节
全文共10404字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144201],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

