
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
为了进行疲劳强度的试验,我们需要一个适当的装置以能够在在实验室的条件下生成给定形式振动的振动载荷。目前,具有液压激励器的试验台被广泛用于这种试验。对于这种由许多基于旋转波轮的,可以编程控制振幅和频率的液压单元组成的非线性自动控制系统,其稳定性是正常操作的必要条件。
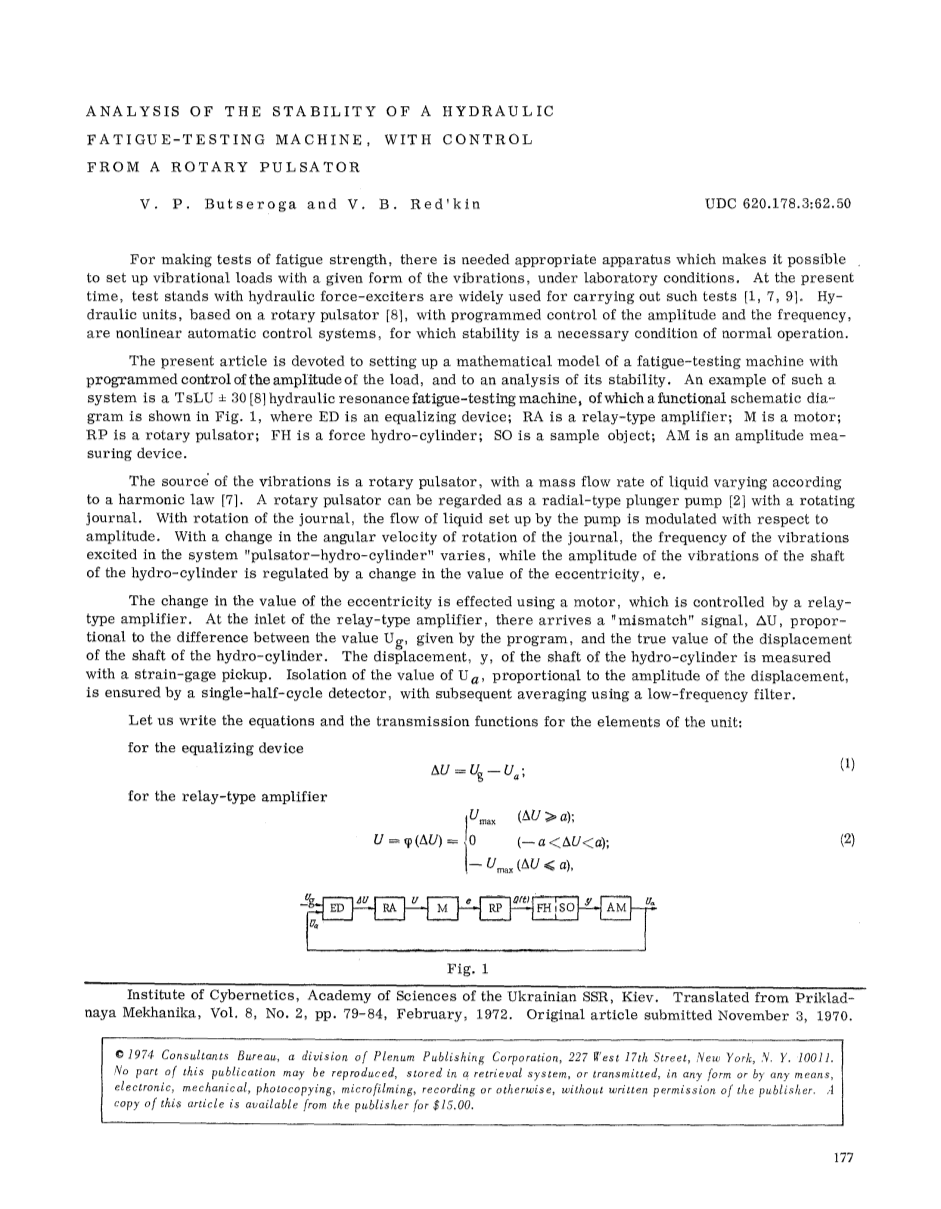
本文致力于建立由程序控制振动负载的疲劳试验机的数学模型,以及分析其稳定性。以TsLU·30液压共振疲劳试验机系统为例,其功能原理简图如图1所示。1,其中ED是均衡装置; RA是中继型放大器; M是电机;RP是旋转波轮; FH是力液压缸; SO是样本对象; AM是幅度测量设备。
该设备以旋转脉动器作为振动源,其中液体的质量流率根据谐波定律变化。旋转脉动器可以被认为是具有旋转轴颈的径向型柱塞泵。随着轴径的旋转,泵内的液体流也随着振幅的变化而变化。随着轴颈的旋转的角速度的变化,“脉动器 - 液压缸”中的振动频率也在发生变化,而液压缸的杆的振动的振幅被规定在偏心值e附件。
偏心值的变化是由继电放大器控制的电机产生的。在中继型放大器的入口处,接入由程序给出的值Ug和液压缸的轴的位移的真实值之间的差成比例的“失配”信号AU。使用应变计传感器器测量液压缸的y轴的位移。由单半周期检测器确保分离与位移的幅度成比例U a的值,随后使用低频滤波器将该值进行平均。
让我们写出单位元素的方程和传递函数:
用于均衡装置:
;(1)
用于继电器型放大器:
(2)
基辅乌克兰SSR科学院控制论研究所。naya Mekhanika,Vol。8,翻译自Priklad-第2期,第79-84页,1972年2月。原文于1970年11月3日提交。
1974顾问局,Plenum出版公司的一个部门,227 Gest 17th Street,纽约,N.Y I0011。本出版物的任何部分不得以任何形式或任何方式复制,存储在ct检索系统中,电子,机械,复印,缩微胶片,录音或其他方式,未经出版商书面许可。这篇文章的副本可从发行商处获得,价格为$ 15.00。
这里是继电器不敏感区域的尺寸; 是允许给电机的转子回路施加的电压的最大限度。
电机的传动功能,由偏心的值来控制,如公式:
(3)
其中K1是电机的传动系数,T1是电机的周期
通过下式描述旋转脉动器的质量流量
(4)
式子中Q(t)是由旋转脉动器设定的工作液体的质量流量; S是柱塞区域的横截面; e是转子相对于定子的偏心率; w是转子的角速度; w1是轴的旋转角速度; z是柱塞总数。
在线性近似中,由应变计放大器,检测器,和低频滤波器组成的测量装置的原理,由传输函数[4]可得:
(5)
其中是滤波器的透射系数;是滤波器的时间常数;是[4]中检测器的等效传输函数。
让我们考虑一个带有旋转脉动器激励的装载液压缸的方程式。 一个“波轮 - 液压缸”系统的液压运动方案如图1所示。 2:RP是旋转波轮; 1是转子; 2是定子; 3是柱塞; 4是分配器轴; 图5是液压蓄能器;FH是一个液压缸; SO是一个示例对象。
为了简化计算,我们做出以下假设:a)“波轮 - 液压缸”系统的工作液体的损失可以忽略不计; b)工作液体的温度条件稳定; c)管道变形可忽略不计。
这些假设没有考虑一些很严重的情况,因为在“波轮 - 液压缸”系统中,在制造管道时,有一个增压泵来补偿损失和工作液体的热稳定装置 具有很大的安全余地。
鉴于“波轮 - 液压缸”系统关闭,我们用下式表示质量流量速率方程式
(6)
其中(t)是用于液压缸轴的位移的有用质量流量;(t)是辅助质量流量,是溢出到蓄能器中的工作液体。
无负载力缸由等式[1,9]
(7)
这里F是液压缸活塞的面积; y是其轴的位移。
考虑到“波轮 - 水力发电机”处于负载状态,考虑到连接的水力蓄能器,液体的补充质量流量可以由等式[6]描述:
,(8)
其中K是液体的质量流量系数; AP是液压缸的空腔之间的压强差。
在疲劳试验机的工作条件下,液压缸轴处的力的方程式形式如[1,9]
(9)
这其中h是阻尼系数; e是待测样品的刚度。
将公式(7),(8)和(9)代入(6)中,我们得到负载力液压缸的方程,作为质量流对位移的依据:
(10)
然后,装载的液压缸的传动功能可以写成:
(11)
其中K 3 = F / oK是液压缸的传动系数; T 3 =(Kh F2)/ eK是液压缸的时间常数。
图3示出了基于所获得的表达式建立的测试单元的结构方案。该方案类似于在交流电上工作的系统。 由于在所考虑的系统中,满足相移的常数值的条件,则为了描述环路ab,在使用包络线时,发送装置功能。 因此,表达式(11)可以由等效传输函数[6]
(12)
现在该系统被降低到如图1所示的结构。 4,其中W(p)是线性部分(LP)的传输函数,即,
(13)
现在很容易得:
(14)
从上述制度的稳定性的角度来看,存在两个特殊的特征:存在无根和非线性的非均衡位置的均衡。 这种系统的稳定性在[3]中讨论。 以下[3],我们介绍点稳定性的概念。 让我们考虑一下系统:
(15)
一个稳定的集合,如果它在Lyapunov意义上的一个小区域是稳定的,那么这个整体就称为稳定的,如果它们整体上是稳定的,并且所有解决方案在整个t〜 ,此外,t〜〜的每个解都接近某个确定的均衡位置。
根据[3],〜o(AU)的非线性必须满足如下条件
(16)
而线性部分具有如下特征:1)虚轴上的一个极点,其余部分在左半平面; 2)p = lim XW *(X)gt; 0; 3)存在q的实际值,使得在w的所有值下,满足以下频率不等式
(17)
在qgt; 0的情况下, 1 / p的数值不是W *(p)的极点。 然后,系统的“固定段”整体上是稳定的。
我们可以看到,非线性(2)满足条件(16),其中#= .o。 在考虑的情况下,线性部分总是满足条件1)和2)。因此,只有条件3)仍有待验证。 接下来我们注意到:
(18)
并且函数rt(p)采用该形式
(19)
然后
(20)
将表达式(19)代入(17),在明显的变换之后,我们获得关于w的偶次幂的多项式
(21)
继续考虑,由(18)和(20)得:
(22)
条件3)如果多项式P(x)= Bo x2 Blx r B 2不具有正实根,则满足条件3)。根据笛卡尔定理,对于B 0gt; 0是足够的[5] B 1gt; 0; B2gt; 0.这些关系决定了q值变化的范围
(23)
因此,如果表达式(23)确定非空集合,则满足条件3),即,
(24)
这就是系统的当量不等式
(25)
考虑到(14)的分析导致稳定性的以下条件:
(26)
(27)
(28
)
在等式(26)中,假设co〜2 gt;gt; 1.关系(27)允许选择负载的值,这将确保系统的稳定性。相关性(28)对滤波器T的时间常数施加限制 2和电机T 1.当T 1 lt;1时,它始终保持; T 2 lt;1.条件(26),(27)和(28)的完成确保了在由“表达式(24)”确定的间隔中存在参数q,并且同样地,确保系统的稳定性。
因此,我们在疲劳试验机的数学模型的基础上,对单元的稳定性进行了分析,并且对单元的参数以及负载允许的值。
摘要:液压疲劳试验机结合机械液压脉动器和闭环控制系统建成试点。 动态容量负载和行程范围为1 MN,由a重叠平均载荷分别为0至1 MN和5 ram,在3.3至10 Hz的频率范围内。 消费的电力和给这台机器的水是大约三分之一的伺服控制电动液压机。该控制系统的稳定性为0.5%的范围。 提出了一些实验结果来证明疲劳试验过程中载荷的极好稳定性。
介绍
液压和谐振式疲劳试验机用于高负荷疲劳试验。1,共振型机器可以运行少量电力;然而,它不能在标本的高阻尼状态下运行,或者长时间行程
高负荷疲劳试验。液压式机器可以在这些条件下运行。因此,液压疲劳试验机用于高负荷和长行程疲劳试验。这种机器通常分为两类:一类是伺服电液电机;另一个是机械式液压波轮。 1-3伺服控制的电液疲劳试验机2具有闭环连续的“0”系统,并且从指令信号连续地校正负载或伸长信号的差异,因此伺服控制电液压机可以在有限频率条件下以负载或伸长的任意波形进行操作,也就是说,它不仅可以产生正弦波形,而且可以产生根据命令信号发生器的随机波形。然而,这种机器需要大量的电力和水来冷却油,所以在施工和运行中都是昂贵的。如果实验室没有足够大的电力供应系统,这种机器不能装备。另一方面,与伺服控制的电动液压机相比,机械液压波轮机3需要较少的电力和较少的冷却水。但是,这台机器有一个openloop控制系统。也就是说,一旦在测试开始时设定了负载的振幅值,则该值不被自动控制。此外,通过两个油压开关的作用,通过连接到工作气缸的旋转阀通过机械波轮单元连接,负载的平均值仅保持在负载范围的5%以内。由于试样的顺应性变化和油温的变化,该开关控制系统在试验开始时不能维持设定值。
然而,操作人员必须随着疲劳测试的进行手动纠正每分钟变化的负载。 此外,该机只能用于正弦波的恒载疲劳试验。
因此,为了获得低功耗的电力以及良好的控制稳定性,构成了配备有机械液压脉动器和闭环控制系统的液压疲劳试验机。 本文报道了该机的原理和优良的性能。
控制系统
如上所述,该机器是基于机械液压脉动器的发电机构构成的。 1-3这种机构独立地产生交变负载和平均负载。名称它由两部分组成:机械液压脉动器,其横截面较小,行程比执行机构更长,并通过a的往复运动产生交替的油压 柱塞和小型油泵,为执行器提供恒定的油压。
在该机器中,使用应变计式称重传感器来检测负载。从其输出检测负载的上下峰值。通过操作电路,从这些峰值计算负载的振幅和平均值。然后,用负载的幅度和平均值的独立反馈来控制负载。图1显示了本机的整体视图。本机控制系统的基本原理如图1所示。并用它进行说明。在机架上构造的致动器的上下缸的油压被独立地供给。样品通过上部气缸的油压与下部气缸的载荷相加。也就是说,施加在试样上的载荷等于上缸体与下缸体的压差和缸体截面面积的乘积。当进行疲劳试验时,上部气缸的油压维持在一定的压力Pv,下部气缸的油压按照公式Pt HPa sin_t进行交替。这里,Pt是下部气缸的平均压力;而Pa sin wt为其交替压力。因此,对应于来自下部气缸的上部气缸的压差的负载Pm〜Pasintheta;施加在试样上。
将高压氮气加压的蓄压器与管路连接到上缸体。 因此,伴随着试样的伸长率或收缩率的体积变化,该气缸的油压的变化变得可忽略地小,并且压力在短时间内被认为是恒定的。
为了补偿随着时间的流逝随之而来的油缸压力的降低,伺服阀通过来自伺服放大器的信号的命令而被致动,该伺服阀的等效于 从设定在恒压设定单元的开始时的值Pc设定在上部气缸中的压力传感器的输出信号。
下部气缸中的压力交变分量Pa sin〜t由机械液压脉动器激发。这是由摇臂上的一个波轮组成的,摇臂与一个曲轴的旋转一起摇摆。脉动器压头随着摇臂的运动而上下滚动,使气缸体积发生变化,激发油压的变化。以这种方式激发的交替油压通过管道到达下部气缸,并向样品施加交变负载。该交替油压Pa的幅度由柱塞在摇臂上的位置决定。位置越靠近摇臂的支点,变小的幅度就越大。因此,当Pa必须改变时,通过伺服马达的行程使波轮在摇臂上移动。通过峰值检测电路检测到的振幅值与在测试开始时先前设定在振幅值设定单元中的值进行比较。然后,通过伺服电机运行的负载幅度保持恒定放大信号的差异在这个比较。
对于平均负载控制,将平均值Pro的输出信号与先前在均值设置单元中设置的值进行比较。伺服阀将油压Pt提供给 在这种比较中对应于差分信号的下部气缸的平均值。用于控制平均负载,Pro和恒定压力Pc的伺服阀的流量比与之相比非常小 用于通常的伺服控制电动液压机的伺服阀,并且连续校正来自正弦波形或随机波形的指令信号的负载或伸长信号的差异。
如上所述,该机器具有三个控制回路:用于恒定压力,振幅值和平均值。 每个控制电路具有适当的积分电路,以避免彼此之间的干扰。
到目前为止,控制系统被解释为负载控制。 延伸控制可以通过将测力传感器与引伸计相互交换来进行。当需要程序测试时,振幅和平均值设置单位可以由适当的编程信号发生器代替。
峰值检测电路
峰值检测电路如图1所示。输入信号分为两个:一个用于检测上限峰值,另一个用于检测下限峰值。高峰值检测如下:二极管D1允许电流仅在一个方向流动,以对保持电容C1进行充电C1-D2在检测到峰值之后为A1提供反馈。 C1保持信号的高峰值。 4在这种情况下,当信号的上限值变小时,d-c电压不会随之而来。因此,为了复位该值,FET开关SW1由来自机械液压脉动器的同步脉冲eT1闭合。然后,eupl值在每个周期重置为〜〜Yrnax。在cup1复位之前,该电压已经通过同步脉冲er2传送到保持电容器C2。因此,高峰值响应与四分之一周期的de] ay。现在,通过反转二极管的方向和通过交换Er2的同步脉冲erl,以与上峰值检测器相同的方式检测较低峰值。
振幅值是通过从Cup中减去elf并将余数除以2来获得的。平均值是通过将e加到杯中,并将和除以2得到的。
以这种
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138079],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

