英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
2012年国际建模,优化和计算会议
使用自适应模拟PID控制器的无刷直流电机调速系统
无刷直流电机(BLDCM)由于其高效率而广泛用于许多工业应用,高扭矩和低体积。 本文提出了一种改进的自适应模糊PID控制器来控制无刷直流电机的速度。本文概述了常规PID控制器,模糊PID控制器和自适应模糊PID控制器。通过使用普通的常规PID控制器,很难调整参数并获得满意的控制特性。由于自适应模糊具有满足控制特性的能力,便于计算。实验结果验证了自适应模糊PID控制器比模糊PID控制器和常规PID控制器具有更好的控制性能。BLDC电机的建模,控制和仿真已经使用MATLAB / SIMULINK软件包完成了。
由Elsevier Ltd.出版Noorul Islam高等教育中心负责的选择和/或同行评审根据CC BY-NC-ND许可开放获取。
关键词:无刷直流(BLDC)电机,比例积分微分(PID)控制器,模糊PID控制器,自适应FuzzyPID控制器;
一、简介
主要有两种类型,其中第二种产生的助焊剂是工业中使用的无刷电机。第一种是常规电机通过固定极结构的励磁线圈的电流。 永磁体提供必要气隙磁通的电机而不是线绕场磁极。BLDC电机通常被定义为具有梯形反电动势波形形状的永磁同步电机。顾名思义,BLDG电机不会使用电刷进行换向; 相反,他们是电子换向的。最近,高性能BLDG电机驱动器广泛用于工业应用和电动车辆的变速驱动系统。
在实践中,BLDCM驱动器的设计涉及复杂的过程,如建模,控制方案选择,仿真和参数整定等。近来,各种现代控制解决方案被提出用于BLDC电机的速度控制设计[1-3]。然而,传统的PID控制器算法简单,稳定,调整方便,可靠性高,传统的速度控制系统采用传统的PID控制[4] [5]。但是,事实上,大多数工业过程具有不同程度的非线性,参数变化和系统数学模型的不确定性。 整定PID控制参数非常困难,鲁棒性差; 因此,在实际生产中很难在现场条件下达到最佳状态。
本文将自适应模糊PID控制引入到BLDC电机调速系统中[9]。 在自适应模糊PID控制下可实时调整参数。 为了提高自适应模糊PID控制器系统的性能,需要增加输入和隶属函数的数量,同时为每个Kp,Ki和Kd形成单独的规则集。 通过使用单独的一组规则,控制器可以适应任何参数变化。 但是在模糊PID控制器中只有Kp,Ki和Kd形成了一套共同的规则。
本文的目的是通过设计自适应模糊PID控制器来控制电机速度,以便在负载变化时保持电机速度恒定,从而显示速度的动态响应。 仿真结果表明,自适应模糊PID控制器的性能优于模糊PID控制器和传统PID控制器。
二、无刷直流电机调速系统结构
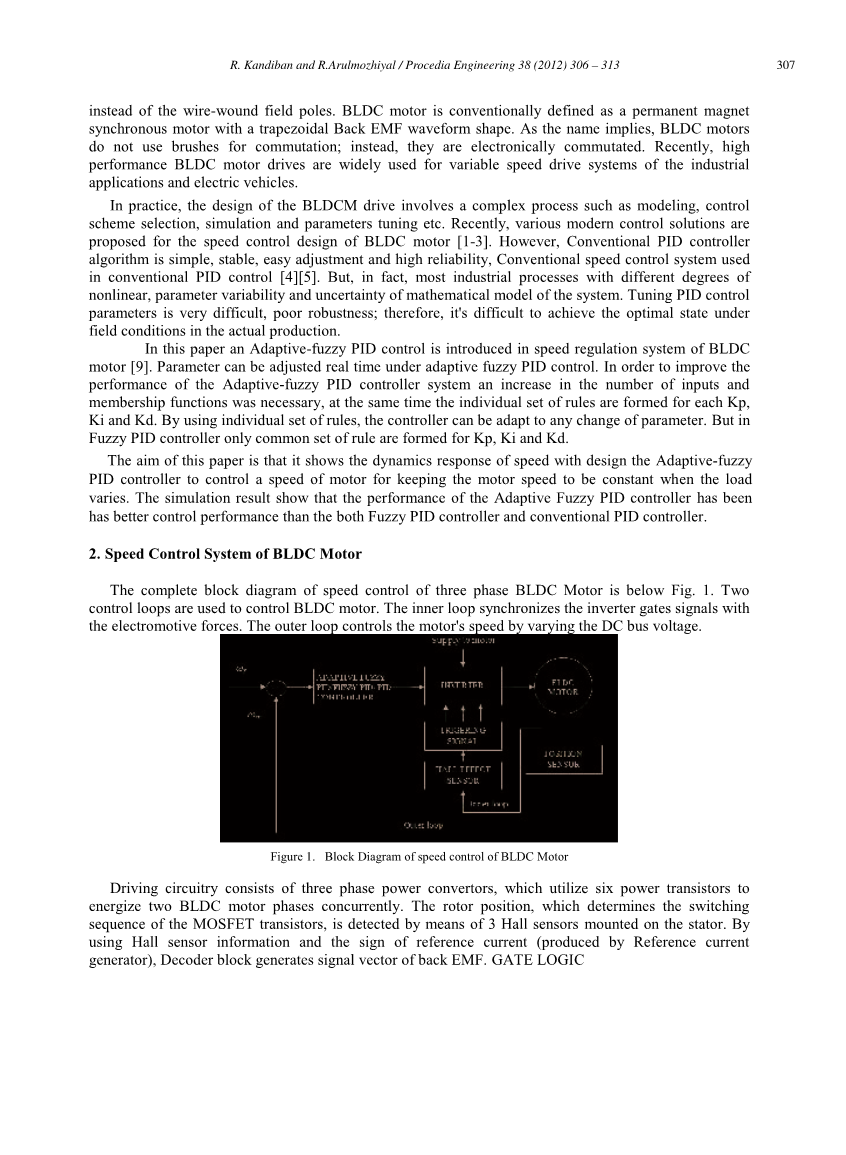
三相BLDC电机速度控制的完整框图如图1所示。两个控制回路用于控制BLDC电机。 内环使逆变器门信号与电动力同步。 外环通过改变直流母线电压来控制电机的转速。
驱动电路由三相电源转换器组成,利用六个功率晶体管同时激励两个BLDG电机相。 决定MOSFET晶体管开关顺序的转子位置通过安装在定子上的3个霍尔传感器来检测。 通过使用霍尔传感器信息和参考电流符号(由参考电流发生器产生),解码器模块产生反电动势的信号向量。
三、控制器回路
- PID控制器
考虑图2中下图所示的特性参数 - 比例(P),积分(I)和微分(D)控制,
PID控制器是简单的三项控制器。 字母P,I和D代表P-比例,I-积分,D-微分。 最基本形式的PID控制器的传递函数
其中KP =比例增益,KI =积分增益,KD =微分增益。
从控制器到工厂的控制a等于比例增益(KP)乘以误差的量值积分增益(K;)乘以误差的积分加上导数增益(Kd)乘以误差的导数。
PID控制器的KP,KI和Kd值的值如下表I所示,通过使用ZN方法获得。
- 模糊PID控制器
本文采用的模糊PID控制器是基于两个输入和一个输出。使用控制器的整体结构如图3所示。在模糊PID控制器中,只有一个输出连接到Kp,KI和Kd。
通过使用Se,Sde和Su的缩放因子来获得变量的实际区间。 模糊控制规则的形式如下:IF e = Ei和ce = dEj THAN UPD = UPD(i,j)。 这些规则被写入规则库查找表中,如图3所示。规则库结构是Mamdani类型。
FLC有两个输入和一个输出。 这分别是误差(e),误差改变(de)和控制信号。 含有输入和输出的语言变量已被分类为:NB,NM,NS,Z,PS,PM,PB。 输入和输出全部在[-3,3]区间内归一化,如图4所示。
用于描述模糊集合的语言标签是负大(NB),负中等(NM),负小(NS),“零”(Z),“正小”(PS) 正中等“(PM),”正大“(PB)。 可以如表II所示分配一组决策规则。 模糊规则是从关于过程的基本知识和人类经验中提取的。 这些规则包含定义控制策略的输入/输出关系。 每个控制输入有七个模糊集,所以最多有49个模糊规则。
四、仿真结果及讨论
图7显示了在(a)速度和(b)转矩的空载条件下,参考速度为3000rpm的BLDG电机的自适应模糊PID控制器,模糊PID控制器和常规PID控制器的性能。 结果表明,模糊PID控制器到达建立时间分别为常规PID控制器,模糊PID控制器和0.35秒,分别为0.10和0.10秒。
图8显示了在(a)速度和(b)转矩的负载条件下,在3000rpm的降速下,BLDG电机的自适应模糊PID控制器,模糊PID控制器和常规PID控制器的性能。。 结果表明,常规PID控制器,模糊PID控制器和模糊PID控制器达到稳定时间分别为0.35秒,0.10秒和0.10秒。
图9所示为在(a)速度和(b)转矩的负载冲击条件下,模拟PID控制器和BLDC电机的常规PID控制器在3000rpm速度下的性能。 在BLDG电机运行期间,突然在0.5秒时施加5N.m的载荷,并在0.7秒释放。 结果表明,传统PID控制器达到稳定时间为0.35秒,而模糊PID控制器达到稳定时间为0.15秒。
为了评估系统的性能,一系列的测量已经完成。 三相无刷直流电机的PID控制器,模糊PID控制器和自适应模糊PID控制器的性能比较如表4所示。 我们考虑以下特征:上升时间(tr),过冲(Mp)和稳定时间(ts)。
从性能比较来看,自适应模糊PID控制器比传统的PID控制器和模糊PID控制器具有更好的控制性能。
五、结论
本文提出了三相无刷直流电机的常规PID控制器,模糊PID控制器和自适应模糊PID控制器的仿真结果。 在传统的PID控制中,当参考速度改变时不需要改变控制参数。 从仿真结果可以看出,对于相同的运行条件,使用自适应模糊PID控制器技术的BLDC速度控制比传统PID控制器和模糊PID控制器具有更好的性能,主要是当电机工作在越来越高的速度时。 另外,当负载变化时,电动机速度是恒定的。
六、致谢
作者感谢来自泰米尔纳德邦Salem-5的Sona技术学院院长和电子电气工程系的支持和鼓励。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21310],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

