英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
Data-Driven Online Speed Optimization in Autonomous Sailboats
Abstract
This paper addresses the issue of data-driven online velocity optimization of an autonomous sailboat. Autonomous sailboats represent an ideal for long range and duration reconnaissance missions. Sailboat control is a challenging control task; sailboats are characterized by a number of control variables, all of which affect the ship trajectory and state in a highly nonlinear fashion. In this paper, a path-following automatic sailboat controller is presented. The control system has two main components : a heading control, acting on the rudder, and a velocity optimizer, acting on the sails. The optimizer is based on a modified extremum seeking approach. This paper also derives a first-principle-based 4 DoF sailboat model that is experimentally validated and used to guide the design and tuning of the control system. In fact, the control system is first tuned and validated in simulation. The simulation environment enables the comparison of the proposed model against a theoretical benchmark and a state-of-the-art controller. The analysis reveals that the proposed control system achieves near-optimal performance and considerably outperforms the state-of-the-art solution. Finally, the controller is tested and validated on an instrumented scale model.
I.INTRODUCTION
SAILING has written entire chapters of human history. It played a role in commercial exchanges, exploration and human migration for centuries until the introduction of steam-powered vessels in the 18th century. Self propelled vessels quickly relegated sailing to leisure activity. Even as a purely leisure activity sailing has a long history; sailboat racing is believed to have formally started in the 17th century in the Netherlands [15]. Nowadays, despite remaining an extremely popular pastime in many regions of the world, sailboats are regaining interest thanks to recent developments in autonomous vehicles. Autonomous sailboats may serve as platforms for long range oceanic observing and monitoring missions [4], [16] and possibly also for low cost shipments.
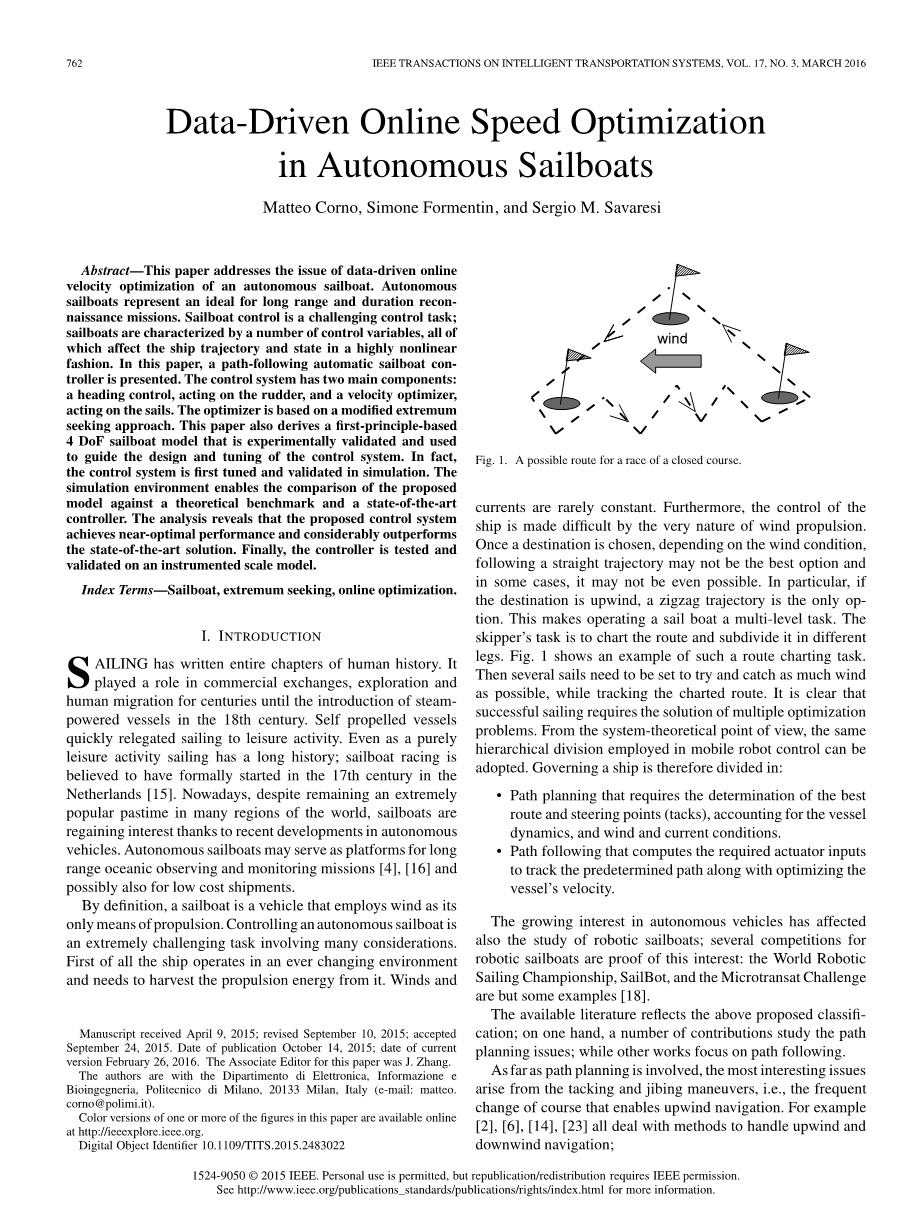
By definition, a sailboat is a vehicle that employs wind as its only means of propulsion. Controlling an autonomous sailboat is an extremely challenging task involving many considerations. First of all the ship operates in an ever changing environment and needs to harvest the propulsion energy from it. Winds and currents are rarely constant. Furthermore, the control of the ship is made difficult by the very nature of wind propulsion. Once a destination is chosen, depending on the wind condition, following a straight trajectory may not be the best option and in some cases, it may not be even possible. In particular, if the destination is upwind, a zigzag trajectory is the only option. This makes operating a sail boat a multi-level task. The skipperrsquo;s task is to chart the route and subdivide it in different legs. Fig. 1 shows an example of such a route charting task. Then several sails need to be set to try and catch as much wind as possible, while tracking the charted route. It is clear that successful sailing requires the solution of multiple optimization problems. From the system-theoretical point of view, the same hierarchical division employed in mobile robot control can be adopted. Governing a ship is therefore divided in:
bull; Path planning that requires the determination of the best route and steering points (tacks),accounting for the vessel dynamics, and wind and current conditions.
bull; Path following that computes the required actuator inputs to track the predetermined path along with optimizing the vesselrsquo;s velocity.
The growing interest in autonomous vehicles has affected also the study of robotic sailboats; several competitions for robotic sailboats are proof of this interest: the World Robotic Sailing Championship, SailBot, and the Microtransat Challenge are but some examples.
The available literature reflects the above proposed classification; on one hand, a number of contributions study the path planning issues; while other works focus on path following.
As far as path planning is involved, the most interesting issues arise from the tacking and jibing maneuvers, i.e., the frequent change of course that enables upwind navigation. For example[2], [6], [14], [23] all deal with methods to handle upwind and downwind navigation;
As for path following, several approaches have been developed [1], [12], [20]. In [5], the authors design a classical PI heading controller . The controller is designed based on a second order linear model and neglects the sail control. More advanced solutions employ nonlinear techniques. Among nonlinear control techniques, fuzzy controllers [17], [24] are popular thanks to their ability of accounting for the qualitative know-how of skippers and helmsman without the need of mathematically formalizing it. These solutions have the advantage of being model-free and can robustly track the desired route, but there is no explicit attempt at optimizing the ship velocity, one of the most daunting task. The issue of velocity optimization is explicitly addressed in [11] where a feedback linearization is executed and sails are operated to track their optimal working condition. However, the optimization is model-based and thus it suffers from possible modeling errors. The main drawback of the above methods is that either they do not consider the velocity optimization problem at all or the optimization is model-based. The open-loop model-based velocity optimization is problematic as it is based on sail polars [19]; which are static maps that describe the force exerted by the sail based on wind velocity and wind angle of attack. Sail polars are approximate and very costly to obtain as they require wind tunnel tests. To the best of the auth
全文共32487字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[143870],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 船舶在浅水航道中航行时的岸壁效应数值研究外文翻译资料
- 基于三维面元法限制水域船体下蹲的数值研究外文翻译资料
- 关于甲板大开口船体梁极限抗扭强度的实验研究外文翻译资料
- 基于斯托克斯方程计算和系统识别 方法预估实船操纵模型参数外文翻译资料
- 水面舰艇5415在PMM演习中的基准CFD验 证数据-第二部分:平均相位的立体PIV流 场测量外文翻译资料
- 初步设计阶段船舶功率推进预测第二部分初步设计中有用的服务速度船舶功率推进数学模型外文翻译资料
- 对某高速船模湍流自由表面的数值与试验研究外文翻译资料
- 第三章水下搜救与恢复操作外文翻译资料
- 液化天然气供求关系的现状与展望:一个全球性展望外文翻译资料
- 基于CFD的高层钢结构建筑风效应数值评估外文翻译资料

