英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
激光雷达信号变精细的新方法
K. Stelmaszczyk, A. Czyzewski, A. Szymanski, A. Pietruczuk,
S. Chudzynski, K. Ernst, T. Stacewicz
Institute of Experimental Physics, Warsaw University, ul. Hoza˙ 69, 00-681 Warsaw, Poland
(Fax 48-22=621-0985, E-mail: kamil@fuw.edu.pl)
摘要:在激光雷达测量中,噪声和波动强烈影响结果。其原因是距离的增加伴随着信噪比的快速下降。差分吸收激光雷达(DIAL)对信号的不稳定性特别敏感。在本文中,我们提供一种信号采集方法,它适合于大型光通量和单光子的采集。我们还提出了DIAL方程组求解新方法,相比于用于改善信号的传统算法,我们的程序是更稳定的,并且它们能够增加激光雷达测量的有效距离。
0 引言
最近,已经发现激光雷达方法的快速发展。这些著名的技术中包括分析光脉冲在被研究对象散射的回波。在许多应用中,激光雷达广泛应用于大气研究和环境研究。
最简单的激光雷达,称为气溶胶激光雷达,是基于光脉冲在雾滴,冰晶,或悬浮在空气中的灰尘粒子的后向散射[1]。在这里,瑞利和米氏光散射的过程发挥最重要的作用[2,3]。
从环境的角度研究,最有用的是差分吸收激光雷达(所谓的DIAL),因为它能够检测在大气中具有选择性的各种类型的气体。DIAL发射两种脉冲:一个波长是lambda;on,它被调到被研究污染物的吸收线上而另一个波长是lambda;off,被研究污染物对lambda;off的吸收程度比对lambda;on要弱,且lambda;off被充当为参考信号。
对回波信号的两个波长可以写公式,分别为:
, (1)
, (2)
这里的NL表示在激光脉冲中发射的光子平均数,A0表示在激光雷达接收机使用望远镜的表面积,nsc(R)指散射粒子的浓度,Delta;R=ctau;/2指空间上光脉冲二分之一的长度,c指光速,xi;R指接收器的几何效率,且ϵ(lambda;)指光接收机的频谱效率。该指数因子描述的光强过大气传播的缩减即衰减,这里的alpha;tot(R)表示完全衰减的系数,同时考虑散射和吸收过程(alpha;tot(R)=alpha;sc(R) alpha;abs(R)=sigma;scnsc(R) sigma;lambda;nabs(R)这里的sigma;lambda;是波长lambda;的吸收截面,nsc(R)和nabs(R)分别是散射和吸收分子的绝对浓度)。
从(1)和(2)吸收分子的绝对浓度nabs(R)可以发现:
, (3)
这是DIAL问题解的传统或斜率方法。目前DIAL是独特的检测器,它提供了在大气中大约20种不同的气态化合物远程和选择性传感的机会[4-8]。
1 在激光雷达信号中的误差
激光雷达精度的主要限制是由该信噪比随距离R的增加,迅速下降的事实引起。它涉及到所有类型的激光雷达,然而DIAL的方法特别受噪声影响,因为差集和连续微分的过程在式(3)中得到应用。这是众所周知的,这两个操作对信号噪声的敏感很强烈。
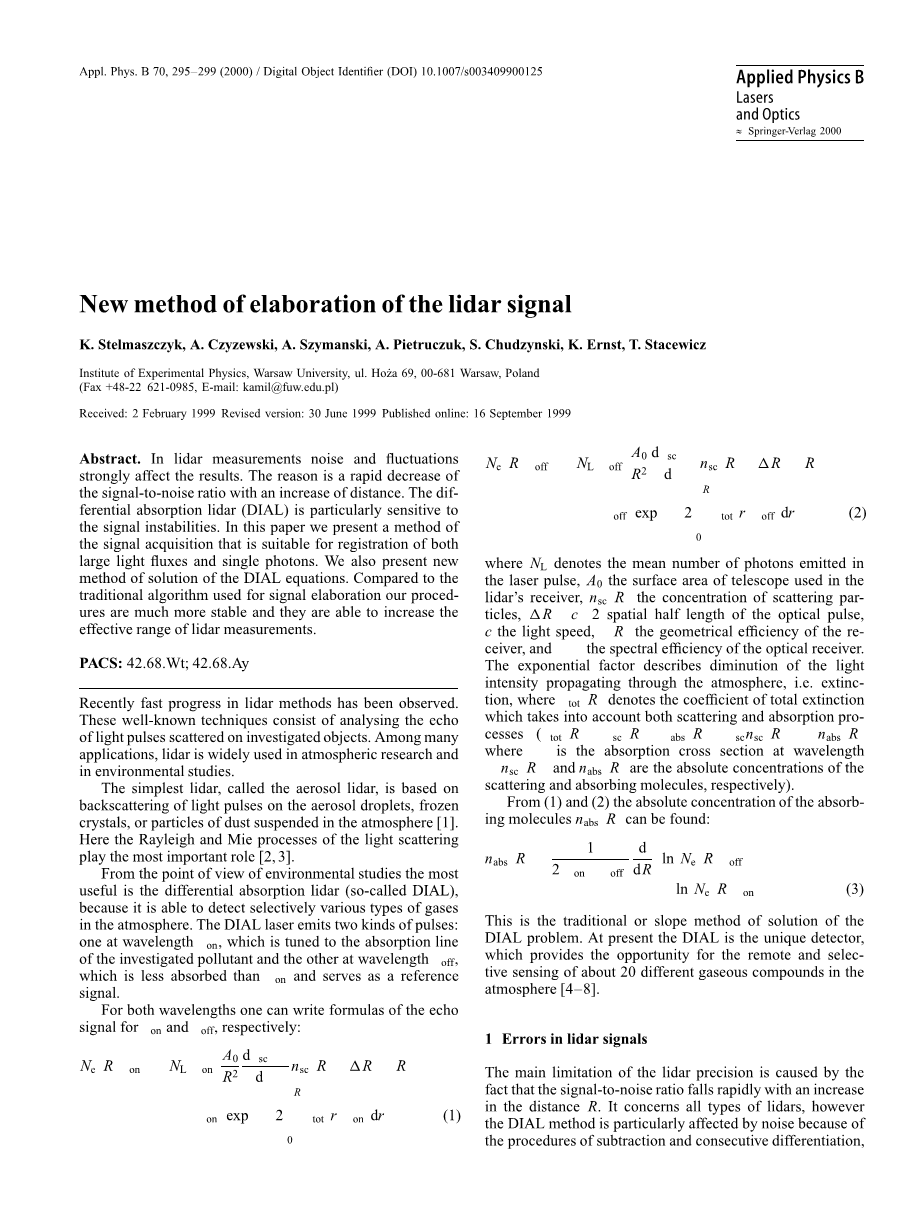
我们研究了噪声对使用数值模拟大气中吸收体(SO2)浓度分布的DIAL结果的影响。图1展现了被假设的云状吸收体的形状。且使用方程(1)和(2)可以得到lambda;on和lambda;off激光雷达信号。很明显,这个过程是完全可逆的即使用两个信号可以重新得到最初假定的吸收体的分布。
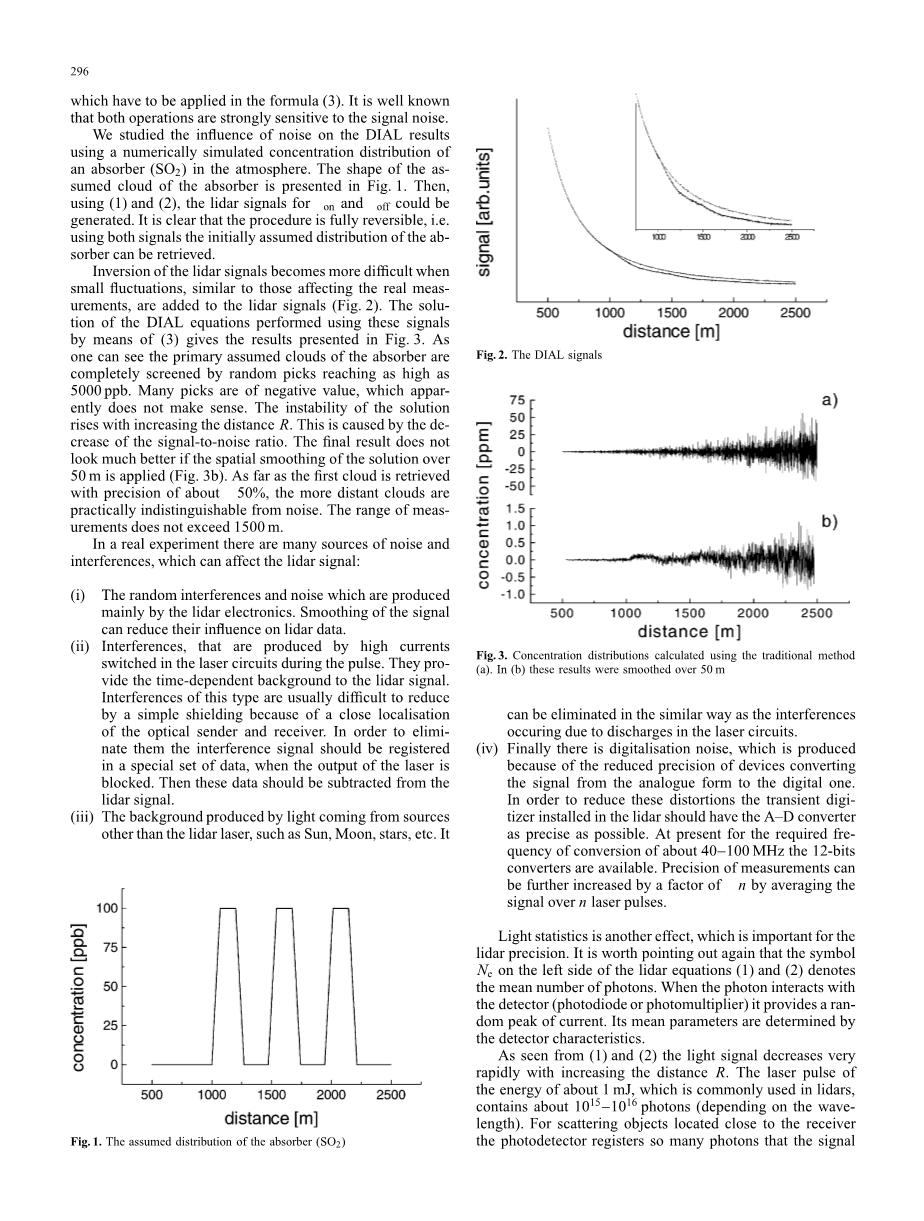
当小的波动,类似于那些影响实际测量,被添加到激光雷达信号中时(图2),激光雷达信号的反演会变得更加困难。借助于使用方程(3)的方法的信号的DIAL方程解给出的结果呈现在图3。作为一个可以看到的主要假定云吸收体完全由随机挑选的浓度高达5000 ppb筛选出来。许多挑选出来的是负值,这显然是没有道理的。方程解的不稳定性会随着距离R的增加而上升。这是由信噪比的降低引起的。如果应用的解在空间上的平滑超过50m,那么最终结果看起来比较差(图3b)。直到第一个云有50%左右精度被接收到为止,更远处的云信号基本不能从噪声中区分开。测量的范围不超过1500米。
在实际的实验中有许多噪声和干扰的来源,这会影响到激光雷达信号:
(i)主要是激光雷达的电子所生产的随机干扰和噪音。信号的滤波可以减少他们对激光雷
达数据的影响。
(ii)干扰,是在脉冲期间由高电流在激光电路切换所产生。它们给激光雷达信号提供与时
间相关的背景。这种类型的干扰通常难以通过简单的屏蔽减少,原因是光发送器和接收
器的位置紧密。为了消除这些干扰信号,当激光被阻止输出时,应该采集一组特殊的数
据,然后这些数据应该从激光雷达信号中减去。
(iii)背景光不是由激光雷达产生,而是来自于如太阳,月亮,星星,等。它可以用相似的
方法消除如果干扰是由于激光雷达电路的放电产生。
(iv)最后是数字化噪声,这是由于设备的信号从模拟形式转换到数字的精度降低产生的。
为了减少这些误差,安装在激光雷达里面的模数转换器应该尽可能和A-D转换器一样
精确。目前需要的转换器的频率在40-100MHz左右,12位字节的转换器是符合要求的。
由通过这个因子即平均n个激光脉冲的信号,测量精度可进一步提高。
光统计是另一种影响,这对激光雷达精度非常重要。值得再次指出的是,在激光雷达方程(1)和(2)左侧的符号Ne表示的是光子的平均数。当光子与检测器(光电二极管或光电倍增管)相互作用时,它提供一种无规律的电流峰值。其平均参数由检测器的特性来确定。
从(1)和(2)可以看出,光信号会随着距离R的增加迅速减少。激光雷达常用约1毫焦雷达脉冲能量包含1015-1016左右的光子(取决于波长)。对于位置靠近接收器的散射物,光子检测器收集到如此多的光子以至于信号可以认为是平滑的电流。然而在这种情况下,光子数的波动会产生的电流峰。针对几公里的距离,光子检测器的信号由代表单个光子的分离脉冲组成,即使是一个典型的干净大气的消光也是如此(大约每公里0.5dB)。这意味着光信号应在激光雷达方程(1)和(2)的使用前进行适当地平均。
这个问题通常是由光采集的双系统的手段解决。对于强信号,光检测器的电流由瞬态数字转换器的装置传送到计算机,而对于小信号,使用的是光子计数系统。然而这样的解决方案在中程效果不好,这里的光信号足够强时可能会导致光子重叠。这样的情况出现在图4,其中出现的典型电流峰代表单个光子或者光子群。有不同的阈值,这里用于光子计数,每被阈值区分出来就被看住是一个光子。该系统在光子脉冲被很好分离的情况下正常工作,在b和c情况下展示的两个光子脉冲将被错误地认为收集到单个脉冲。
图1 吸收体的假定分布(SO2)
图2 DIAL信号
图3 采用传统的方法来计算的浓度分布(a).在(b)中,超过50米的数据结果进行了平滑
图4 单光子脉冲形状:(a)很好地分离开,(b)和(C)重叠在一起
2 DIAL方程解的新方法
我们发现这个问题可以通过一个单独的、快速的数字转换器和光子检测器信号的合理平滑解决。在(1)和(2)左侧使用的激光雷达信号Ne(r)可以通过对光子检测器信号s(r)积分和微分的方法计算出来:
(4)
在数值积分中dr=cDelta;t,这里的Delta;t指数字点之间的时间间隔。由于对信号积分,可以得到正比于整个检测器脉冲总电荷的函数。积分过程模拟一个电荷放大器,该放大器通常用于光子计数技术。这些提供了机会,以避免由于光子重叠脉冲造成的错误。微分本地化了距离(时间)规模的光信号。此外,当Delta;Rgt;dr时,对于任何种类信号都是很好的平滑方法。最后,通过伴随距离R的增加,Delta;R(即平滑参数)值连续增长,根据信噪比的改变,它可以改变平滑能力。这种方法可以在数字化速度足够快以至于在几个点探测能够合理地使光子脉冲数字化时被成功应用。
在实际工作中,为了改善激光雷达数据的质量,几个其他的过程需要做。信号s(r)必须通过平均几百或几千个雷达脉冲后得到。此平均为减少随机噪声和干扰,也为增加数字化的精确度是必需的。然后,背景的信号被认为是一个独立的数据集b(r)。s(r)和b(r)信号都使用(4)平滑,(4)分别提供了函数S(R)和B(R)。最后,通过从S(R)数据中减去背景数据集B(R),应用于(1)和(2)中Ne(R)函数可以得到。
原则上,Ne(R,lambda;on)和Ne(R,lambda;off)函数在(3)中可以被取代。然而,残留噪声可以很强烈地影响提供了无意义浓度值的结果,尤其在更高的距离R。我们发现这个问题可以通过寻找以下表达式的最小值成功地解决,下式来自于DIAL方程(1)和(2):
, (5)
通过数值方法,通过用每个dr区间取代nabs(r)可以发现最小值。在我们的方案中,nabs(r)在伴随1ppb且dr=1.5m的精度,从0到5000ppb的区间中可以搜索到。为减少迭代次数,从最小的R和最小的nabs(r)开始搜索然后在系统上改变他们是很方便的。否则对于如2500个点组成数据集的例子,需要进行次迭代,问题变得无法解决。我们用于发现表达式(5)的最小值的方法是黄金分割法。
作为最终的结果,函数Nabs(r)最适合左侧即被选择的激光雷达信号比。该方法需要处理很快的电脑,甚至使用一台PC(Pentium,233MHz),解也需要几分钟才能出来。与传统的DIAL问题解决方法比较,(5)中另外需要lambda;on和lambda;off的激光脉冲能量比。但是,它可以很容易地使用能量计完成。
3 实例
DIAL问题解决的两种方法用图2所示的人工信号进行比较。超过100个激光脉冲被平均化的信号在这两种方法被取代。对于每一个脉冲,采用蒙特卡洛方法都是可以独立产生波动。
激光雷达问题的解决方案体现在图5中,这些信号没有在距离上进行平滑。上部曲线(a)对应于使用传统的方法获得的结果。人们可以看出,相比较于图3a所示的结果基本上没有任何改善。该解是非常不稳定的,波动超过10ppm并且仍然有负的浓度值出现,另一方面,用新方法(来自(5))得到的在图5b所示的解看起来更加合理。这种做法没有负浓度值且主要假定吸收云的精度对于第一、第二和第三种云分别重建为33%、46%和54%。
对于图6中的结果,超过30米的激光雷达信号被平滑也是适用的。这提高了使用传统的方法(图6a)取得的成果的质量,但噪音仍使最终结果有一个很大的不确定性,尤其是在距离超过2000m时。对于连续云,数据的不确定度分别达到9%,20%和40%。在这种情况下,新方法的优点(图6b)中是明显的:第一云导出的平均不确定度有7%,第二个有14%,然而超过2000m时的距离的平均值的波动仅达到约18%。
波动的进一步减少可通过新方法与激光雷达信号的更好的平滑结合来实现。对于图7呈现的结果,在信号范围末端(2500m),500m到300m的距离上,平滑距离从30m线性增加。然而,在这种情况下,远处的云的形状由平滑过程变形很强烈。
最后,我们取来自激光雷达测量中得真实数据集比较解激光雷达方程的两种方法,每个波长都是1000个激光脉冲以上的平均值。激光雷达信号在1998年7月20日时在帕布斯特嵩下午2时进行的柏林臭氧试验 (Berlioz) [9]通过DIAL系统[10]的方法记录下来。我们用来测量臭氧浓度的波长分别为282.4 nm和286.3毫微米对应着lambda;on和lambda;off[11]。使用(3)计算出的浓度分布示于图8a。显而易见的是,这两个有噪声的激光雷达信号简单的对数微分导致浓度夸张地高达80ppm,此外,他们通常都是负值,这显然是毫无意义的。
图8a展示的结果是另外超过50m距离被平均过的,图8b是浓度分布。尽管空间平均结果不能被认为是令人满意的,但是随机峰值的动态范围减少是有意义的。
对于DIAL方程两种解方法之间的比较:传统的(3)和在本文提出的(5),我们使用相同的数据根据有平滑参数(Delta;R=50m)的新方法计算臭氧浓度。结果呈现在图 9a。比较从图8和图9上的曲线,我们可以看出新方法更加稳定。如果另外采用在空间上超过50m的距离(图9b)平均一下,最终的结果变得更好,就
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[30967],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 气候变化对径流影响研究中多个gcm、统计降尺度和水文模型的比较与评价外文翻译资料
- 蒙古高原与青藏高原对北太平洋西风急流的影响外文翻译资料
- 用RAMS-CMAQ模拟北京气溶胶对大气能见度的影响外文翻译资料
- 春季江淮流域多尺度气旋活动及其与降水异常的关系外文翻译资料
- 中国东部地区春季1壤湿度和夏季降水关系的统计分析外文翻译资料
- 长江流域降水变率的AMIP GCM模拟外文翻译资料
- 中国水汽变化及气溶胶的影响外文翻译资料
- 大西洋盆地及其相邻大陆地区气溶胶的CALIPSO衍生三维结构外文翻译资料
- 基于雨量计观测数据的登陆中国的热带气旋的降水日变化外文翻译资料
- 基于CloudSat数据的热带云属现象描述外文翻译资料

