英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
减少车辆燃耗及提高驾驶安全性的公路线形设计新方法
摘要:为评估已给公路路线燃料效率、视距不足、预期交通事故成本三方面的问题,本文根据其几何要素指标值提出了独立计算方法。燃料消耗模型的建立基于以下两个重要思想:一是车辆燃油消耗量的变化取决于公路线形的变化,二是在确保适用于巡航速度的条件下将燃耗最小化。该方法可预估在驱动力能够保证车辆以巡航速度在被评估路段行驶过程的总燃耗值。建立的视距离模型,不仅能够自动计算可视视距 (ASD) 和停车视距 (SSD),而且还可以评估路线的视距不足程度。路线的总视距不足评估基于以下两个部分,可视视距小于停车视距的路段长度,以及视距受限的严重性性。采用公路安全手册(HSM)中提出的事故预测模型,从安全角度评估和比较路线方案。本文还提出了一个实例来证明开发方法的可行性。这些方法与作者先前开发的公路线形优化模型(HAO模型)相结合,通过权衡各类相关参考因素来评价一条公路的多个路线方案。这些参考因素包括车辆燃料使用效率、视距以及安全性,除此之外还包括各类成本,例如建设成本、养护成本、运营成本以及环境影响代价等。这样的综合模型将有助于评价绿色和环境友好型的公路,除此之外还有一些拓展问题将在今后进行探讨,例如当车辆从坡顶开往坡底时驱动力产生的附加影响以及在车辆类型、行驶坡度、天气和其他因素影响下车辆燃料消耗率的变化情况。
关键词:绿色公路设计,公路线形评价,优化设计,燃耗,视距,安全性
概述
燃料价格的上涨促使我们开发新的方法来评价公路路线方案,在尽可能减少车辆燃耗的同时提高驾驶安全及舒适性。车辆燃料使用的增加不仅会加重人们的纳税负担,同时会导致更加严重的环境污染,从而对人类健康造成危害。一些学者主要从成本最小化的角度研究出了优化方案。同时,遗传算法、动态编程、线性编程以及混合整数规划问题也被应用于拟建道路最佳路线设计中。路线优化模型的主要决策标准是将建设总成本最小化,建设总成本包括土方工程成本、土地征收成本和路面建设成本等。然而,该优化方案实际只是将总造价最小化,没有考虑其他重要相关问题,例如车辆燃耗、出行时间以及对环境影响的最小化。
最近,作者提出了评价优化现有路网中公路路线对交通影响的数学模型。该模型基于路线优化模型扩展了遗传算法,其中还包括出行成本的目标函数,使得公路路线优化问题成为一个双层规划,该模型被称为HAO模型。 结果表明,在考虑与不考虑出行成本的情况下,路线优化结果存在明显的差异。该模型的优化过程中还考虑到了公路路线对环境脆弱地区的影响。
路线方案比选是为了使车辆燃耗更经济、行驶更安全,因此在公路路线优化中,还需要考虑燃料消耗和交通安全这两个重要因素。目前,一些车辆燃耗模型与交通事故预测模型仍在开发中。公路等级、平曲线半径和超高值这些道路几何特征现已被用来评估给定公路的车辆行驶燃耗值与交通事故发生频率。但是它们没有一个作为决策标准被有效的整合到前面提到的公路路线优化过程中。本文根据车辆燃耗、视距、安全性以及建设成本,并结合路线优化工作,提出了一个较为实用的数学模型来评价各类公路路线。
设计一条行驶安全与舒适的公路必须考虑到视距这一要素,如今已开发出很多分析模型来计算公路的可视视距(ASD)以及判断在哪些路段上驾驶员的可视视距(ASD)小于停车视距(SSD)。通过对现有模型的仔细研究本文提出了一种不仅能够自动计算白天与夜间的可视视距,还能对一条公路视距不足的严重性进行评价的方法。
车辆燃耗效率评价
公路线形的变化程度对车辆燃料使用量的影响较大。燃耗量又直接关系到车辆行驶成本;此外,化石燃料的使用还将造成温室气体和污染物的排放。因此,为了建造一条燃耗高效型与环境友好型的公路,需要重视公路几何线形对车辆燃耗的影响评价。相关学者的现场实验证实了道路坡度对轻型车辆的燃耗有着明显的影响。同时路面粗糙程度和不同等级道路路段长度也会影响车辆燃耗。本文作者建立了一种考虑到上述所有相关因素,并对公路几何线形敏感的车辆燃耗模型。
2.1车辆行驶阻力
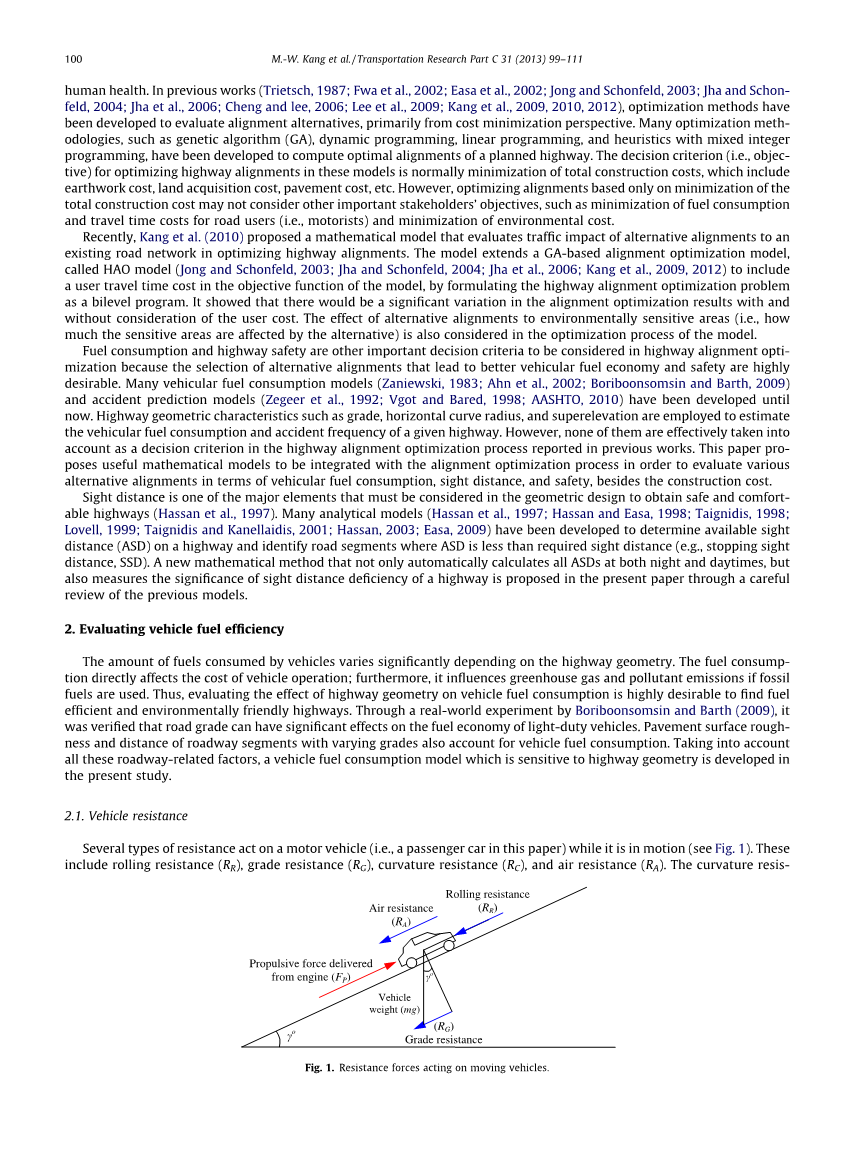
作用在行驶中的车辆上的阻力包括:滚动阻力(RR)、坡度阻力(RG)、曲率阻力(RC)和空气阻力(RA)。其中曲率阻力因超高、加宽、螺旋过度等对平曲线几何处理方法使其对高速行驶车辆的影响可以忽略不计,因此可以取零。根据之前学者研究发现,当车辆以巡航速度行驶时,其燃耗几乎达到最小值。在另一位学者研究出的车辆以巡航速度在不同路面条件下速度与燃耗曲线中,上述观点得到了证实。因此,车辆的驱动力需要克服在巡航速度下的所有阻力之和,各项阻力计算简式如下:
|
|
(1) |
|
|
(2) |
|
|
(3) |
|
|
(4) |
图1 车辆行驶过程中受到的阻力
其中,m为车辆质量;g为重力加速度,取9.8m/s2;Cr为滚阻系数,取决于公路路面类型和条件;c为坡度值;A为车辆迎风面积;q为空气密度;Ca为空气阻力系数;V为车辆行驶速度。
阻力基本计算公式来源于Vuchic (1981),其他阻力(如机械阻力)、车辆发动机效率、传动比等不在上述车辆驱动力计算中考虑,但在更精确的计算中需考虑。
2.2车辆燃耗评估
图2展示了利用维持车辆巡航速度的驱动力来估算燃耗值的例子。如图所示,驱动力随着公路几何线形的改变发生了明显的变化。在坡度为零的路段上,因为只有滚动阻力和空气阻力作用在车辆上,车辆只需相对较低的驱动力即可维持巡航速度。当车辆行驶在上坡路段时,车辆为克服自重需要更大的驱动力。当车辆行驶在下坡路段时,由于负的坡度阻力抵消了其它阻力,车辆可不需要驱动力行驶。无需驱动力即可行驶的路段长度取决于坡度与坡长。值得注意的是,驱动力再生系统能够在下坡时回收和存储能量,可以抵消在丘陵道路上产生的附加燃耗。本文提出了一种基于公路几何特征(坡度、坡长,坡顶位置、竖曲线等)、路面类型及环境、速度等因素估算车辆行驶燃耗计算模型。在已知车辆总燃耗(SFuel)与车辆驱动总功(WP)成正比的前提下,车辆在开始行驶到结束时的总燃耗值可通过下式计算:
|
|
(5) |
|
|
(6) |
图2 给定公路上车辆维持巡航速度所需的驱动力
其中,rFuel为燃耗率,WP为驱动总功,Xstart, Xend为被评价公路路段起讫点。
驱动总功由车辆在其路径上行驶所产生的。因此,如果车辆在任意一点x的驱动力记作FP(x),那么,车辆的驱动总功可通过驱动力在相应距离上的积分来估算(如图二中的阴影区域)。须注意的是,式(6)中的Eq是乘用车的驱动总功。在给出交通组成信息(如:交通流组分信息)的情况下,可通过加入其他类型车辆(客车、卡车等)的附加阻力来获得更加精确的驱动总功。还应指出的是,燃耗率 (rFuel) 在式 (5) 可能由于在档位和环境条件 (如温度) 、车辆类型、 驱动方式、 车龄和维护情况的不同而出现差异。
评估公路线形燃耗效率的基本假设是公路路况畅通。需注意,本文的重点是评价公路线形对车辆燃料消耗,而不是对交通流量的影响。因此,为了得到燃耗高效的公路线形,我们假设车辆在不受其他车辆干扰的畅通路段按照巡航速度行驶。在公路设计寿命内,交通混合及交通量增长会产生延误成本与车辆工作成本,它们在路线优化模型中被独立估算为用户成本,同时也是公路寿命周期中需考虑的成本之一。有兴趣的读者可以参考作者之前发表的公路寿命周期成本探讨来了解更多相关问题。
视距评价
3.1平面线形上的可视视距计算
目前已有一些在平曲线、竖曲线、三维曲线中各类视距计算的研究成果被发表出来,其中部分研究提出了基于多项式函数的三维道路设计方法,从而不需要将平面线形和横断面线形分开设计。平曲线内侧的视距通常受到视障限制,例如挡土墙,建筑物和纵向障碍物。因此,为判断公路线形设计是否合理,应着重分析其每个独立平曲线上是否满足视距要求。本节提出了一种新的方法,通过该方法可计算车辆在平曲线任意位置的可视视距(ASD)。 通过下式计算出的可视视距记作ASDhor,各符号意义如图3。
步骤一:沿道路前进方向,从车辆当前位置(A)至驾驶员能看到的最远位置(B)建立向量,从车辆当前位置(A)至停车视距末端位置(B)建立向量。
步骤二:检查在和向量上是否有障碍物:
(1)如果在两向量上无障碍物(如图3中情况H1),则ASDhor等于MSD;
(2)如果在向量上存在障碍物(如图3中情况H2),那么D点位于B与C之间;然后以A为起点,终点D设在B与C之间并且在障碍物边缘,建立一个新的向量; 这时SSD le;ASDhor<MSD;
(3)如果在向量上存在障碍物(如图3中情况H3),那么D点位于A与B之间;然后以A为起点,终点D设在A与B之间并且在障碍物边缘,建立一个新的向量;此时ASDhor<SSD<MSD;
步骤三:将车辆向前行驶一小段距离(如1m),重复步骤一和步骤二,直到车辆到达评价路段终点。
图3 平曲线上的视线
根据AASHTO (2004),驾驶员反应时间内和制动器开始工作至车辆停止时车辆行驶的总距离(SSD),可表示为下式:
|
|
(7) |
其中,t为刹车反应时间,取2.5s;V为设计速度,单位km/h;a为减速速率,按照AASHTO (2004)推荐取3.4 m/s2;G为切线斜率的百分之一。*如果车辆位于竖曲线上,可使用平均值Gm。
3.2竖直方向上可视视距的计算
3.2.1切线上的可视视距
白天如果没有障碍物阻挡驾驶员的视线,驾驶员能看到很远的地方。但在夜间由于车灯照明范围有限,驾驶员的可视视距显著减少。夜间在没有路灯的公路上行驶时,可见道路长度等于车灯直射的道路长度(AASHTO,2004)。联邦机动车辆安全标准(FMVSS)中提到,“除摩托车之外的所有机动车都应安装至少一盏照明灯,并且能够以白光或者琥珀色光照亮车辆前方300m(1000英尺)的范围”。须注意的是,300m是指驾驶员能看到距其300m远的位置,而不是看清距其300m处的物体。在正常夜间条件下,使用近光灯时驾驶员仅能识别距其45m(150英尺)处的深色物体,使用远光灯时驾驶员能识别距其200m(650英尺)处的深色物体。尽管在无中央分隔带的道路上远光灯很少被使用,但本文仍采用200m作为驾驶员在夜间驾驶时竖直方向上的最大可视视距。
3.2.2凹曲线上的可视视距
由于夜间车辆前方被照亮的部分取决于车前灯的位置及光束方向,因此在凹曲线上的夜间视距受到限制。根据AASHTO (2004)建议,在计算凹曲线上的可视视距时,假设车前灯安装位置距离路面600mm以上且其发出的光束相对车辆平面向上倾斜至少1°。那么可根据(i)车辆位置(ii)光束与路面交点位置将ASD计算公式分为以下5个。
假设在凹曲线中BVC的x坐标为0(即Xbvc=0),如图6所示,令XEVC = Lseg。给定车辆位置坐标x,可通过(i)凹曲线方程和(ii)车前灯光束方程,将XBVC带入,假设车灯高度和照射角度,对凹曲线方程进行求导,可求得光束与路面交点位置XH的坐标,。综上,XH的算式如下:
情况SV1:
|
|
lt;
全文共8215字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[143762],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

