基于螺旋理论的可变中心距齿轮的数学模型和力学性能
郑方焱、华林、韩星会
湖北武汉理工大学,湖北汽车零部件先进技术重点实验室,汽车工程学院,武汉430070
摘要:目前,平面齿轮(包括圆柱齿轮,非圆齿轮)的研究主要涉及固定中心距离的研究,即两个啮合齿轮之间的中心距离在驱动过程中保持不变,而可变中心距离的中心距离保持不变很少触及。固定中心距齿轮虽然没有得到广泛的应用,但可以在非圆形齿轮成形和高扭矩液压马达中找到可变中心距齿轮,展示出独特的机械性能。
本文重点介绍了这种特殊可变中心距离齿轮类型的系统开发优势和机械性能。 在螺旋理论的基础上,首先建立了运动学关系,瞬时螺旋轴,“非共轭”螺距曲线,成形器,包络面和生成面等数学模型。 然后,讨论了适用的可变中心距离齿轮系的机械性能,形式以及优点。
关键词:非圆齿轮,非圆形星齿轮液压马达,可变中心距齿轮。
1.引言
结构紧凑,传动精确,动态性能独特,以及非圆形齿轮的各种应用已经开发出来:Emura和Arakawa 采用非圆形齿轮进行转向机构分析;Dooner使用非圆形齿轮来减小旋转轴中的速度和扭矩波动;Litvin等人研究了用于速度变化和功能产生的非圆形齿轮的齿轮传动装置; Ottaviano等人分析了非圆形齿轮和凸轮从动系统作为功能成形器;H.Terada等人开发了具有非圆形齿轮和凹槽凸轮的耐磨机器人的膝盖运动辅助机构;刘等人设计了用于抛光机构的非圆形齿轮光纤成形器抛光机,执行图8模式。D. Mundo 开发了一种具有非圆形齿轮的行星齿轮系,用于设计高性能自行车的动力驱动机构。K.-H.Modler等人提出了一个将军用于与非圆形齿轮合成齿轮联动的方法。
同时,其他研究已经广泛关注非圆形齿轮的形成:Tong,S.H.和Yang,C.H. D.研究了相同的非圆形曲率曲线的产生;Litvin等人讨论了通过应用齿轮切割机,滚刀和整形机生成平面和螺旋椭圆齿轮; Figliolini,G.和Angeles,J.合成了整形机产生的椭圆齿轮和n型椭圆齿轮的基本曲线。 Bair,B.W。等 建立了数学模型椭圆齿轮分别通过公知的整形刀和圆弧成形刀制造。 Xia,L.et al.提出了滚刀轴向移动的滚齿非圆形斜齿轮联动模型; 江阳等人介绍由成形刀具产生的非圆形齿轮齿廓的数值计算方法。
基于这些研究,非圆齿轮通常被定义为具有固定中心距离的齿轮,其中齿轮的中心距设置为常数并且在运行过程中保持不变。 事实上,在Litvin等人讨论的过程中,使用切片机生产非圆形齿轮。Figliolini和Dooner ,圆形刀具与平面非圆形齿轮元件啮合,它们的中心距离变化。因此,啮合过程可以作为可变中心距离齿轮(VCDG)驱动的情况;; 此外,在特定类型的非圆形行星齿轮液压马达中,行星齿轮的中心距离在运行过程中发生变化,使其成为典型的VCDG驱动器。 总的来说,虽然已经对上述这种齿轮类型进行了研究,但是并没有明确提出VCDG的概念。
本文着重对这种特殊VCDG类型的数学模型和力学性质进行系统的研究:首先建立了运动学关系,瞬时螺旋轴,“非共轭”节曲线,成形器,包络面和生成的数学模型表面; 然后绘制了三种特殊示例和三种替代方法,讨论了机械性能; 最后,梳理数学模型和力学性能,开发出三种具有适用优点的齿轮系。
2.VCDGS数学模型
2.1.运动关系
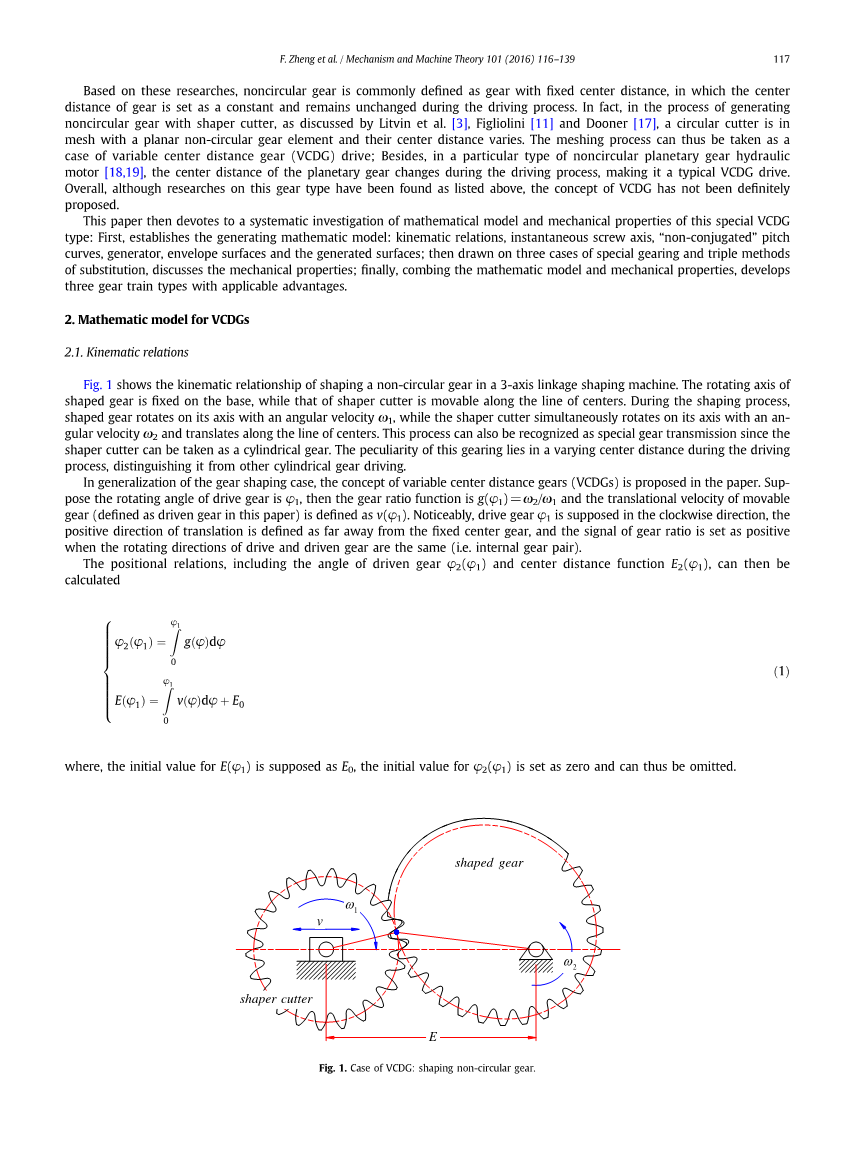
图1展示出了在三轴联动成形机中成形非圆形齿轮的运动学关系。 成形齿轮的旋转轴固定在基座上,而成型机的旋转轴线可沿着中心线移动。 在成形过程中,成形齿轮以其角速度omega;1在其轴上旋转,而成形器切割器同时以其轴向速度omega;2在其轴上旋转并沿着中心线平移。 该过程也可以被认为是特殊的齿轮传动装置,因为可以将切割器作为圆柱齿轮。 这种传动的特点在于驱动过程中的不同中心距离,将其与其他圆柱齿轮传动区分开来。
在齿轮成形机构的普遍推广中,提出了可变中心距齿轮(VCDG)的概念。 驱动齿轮的旋转角度为phi;1,则齿轮比函数为g(phi;1)=omega;2 /omega;1,移动平移速度齿轮(定义为本文中的从动齿轮)定义为v(phi;1)。 值得注意的是,当驱动齿轮和从动齿轮的旋转方向为相同(即内齿轮对),驱动齿轮phi;1为顺时针方向,平移的正方向被定义为远离固定中心齿轮。
然后可以计算包括从动齿轮角度phi;2(phi;1)和中心距离函数E 2(phi;1)的位置关系。
其中,E(phi;1)的初始值被假定为E 0,将phi;2(phi;1)的初始值设定为零,因此可以省略。
图1 VCDG实例;非圆齿轮成形
在设计固定中心距齿轮(FCDG)时,用于确保连续传动的螺距曲线闭合状态仅与从动齿轮的角度有关。 但是对于VCDGs也与中心距离有关,即:
其中,n i和n o分别是指驱动齿轮和从动齿轮的运动循环。
根据上述讨论,VCDG设计有两种特殊情况:
bull;给出了驱动齿轮和从动齿轮(包括俯仰曲线,齿廓)的形状,但齿轮比函数g(phi;1)和平移速度v(phi;1)仍然有待确定(类似于非圆形成形 齿轮)。
bull;给出齿轮比函数g(phi;1)和平移速度v(phi;1),但驱动齿轮和从动齿轮的形状需要确定。
为了简化推导,第二种情况用于建立齿轮类型的数学模型。 第二种情况又通过求解第二种情况下的方程来讨论。
2.2. 瞬时螺旋轴
图2显示了调查VCDG的坐标系。 注意,所有坐标系的z轴都被省略,因为它们沿着相同的方向并且垂直于运动平面。 由于所示的齿轮是外部的,所以从动齿轮的齿轮比和角度都是负的。
bull;坐标框架固定在基座上,其轴沿着驱动齿轮的旋转轴。
bull;坐标系刚性连接到驱动齿轮。 驱动齿轮phi;1的旋转角度是参考系和之间的角度。 从到的坐标变换矩阵如下:
bull;坐标系刚性地连接到从动齿轮。 其相对于的角度是指从动齿轮phi;2的旋转角度,而其相对于的位置是指中心距离E(phi;1)。 从到的坐标变换矩阵如下:
图.2 . 可变中心距齿轮的坐标系
在上述的定义方面,参考系中的输入螺栓(输入齿轮的螺钉)
(5)
其中,和相应地是输入螺钉的主要部分(主矢量)和次要部分(双矢量)。
并且固定参考系中的输出螺钉(输出齿轮的螺钉)为
其中,主矢量由齿轮比函数确定
并且双向量可以计算如下:
根据三轴定理,可以计算出驱动齿轮与从动齿轮之间的瞬时螺栓,如:
其中,主矢量被发现与轴平行,通过随后计算其方向向量(主矢量的单位矢量)如下:
其中,如果,的方向将相反,即
这可以忽略,因为方向不影响几何。
瞬时螺杆轴的位置矢量可以如下获得:
(11)
此外,瞬时轴的方程可以表示为:
其中,t是指z分量的值。 考虑到位置矢量的z分量等于零,沿轴方向,瞬时螺旋轴可以表示为点在平面,换句话说,瞬时中心,具有以下等式:
以这种方式,VCDG驱动器可以被认为是平面齿轮机构,或者甚至是圆柱齿轮。
众所周知,瞬时中心是圆柱形齿轮传动的轴(中心线)上的固定点,而轴上的可移动点是非圆柱齿轮传动。然而,对于VCDG驱动器,瞬时中心只是平面上的可移动点,更为通用。这意味着,如图2所示。对于每个齿轮,极地瞬时中心角(gamma;1和gamma;2)不再与旋转角(phi;1和phi;2)相同。旋转角与极角之间的差角Delta;gamma;1,Delta;gamma;2可以计算如下:
其中,当时,发现Delta;gamma;1=Delta;gamma;2= 0。在这方面,方程(14)可用于区分两种类型:VCDG和FCDG。
参考文献 [17]以及许多其他手册,对于平面齿轮,齿轮比被定义为驱动和从动齿轮的瞬时中心半径(节曲线半径)之间的比率。在本文中,如图2所示这个定义如下:
但是,对于VCDG,此定义无效,因为:
等式(15)不能得到。
通过观察方程 (16),发现齿轮比可以通过将驱动和从动齿轮中的瞬时中心半径的x分量得到(投影长度和在中心线上)即:
在这方面,齿轮比可以重新定义为在中心线上的驱动和从动齿轮的瞬时中心半径的投影之间的比率。 应该指出的是,这个新定义适用于FCDG,因为瞬时中心也在中心线上。 因此,对于所有圆柱齿轮,可以推广新的定义。
图.3.VCDG在不同位置的节曲线
2.3. “非共轭”节曲线
一般来说,共轭螺距表面或轴是通常产生齿廓的参考是在驱动循环期间分别在驱动齿轮和从动齿轮的坐标系中的螺杆轴线的轨迹。 通过将瞬时螺旋轴转换成相应的坐标系,可以获得驱动和从动齿轮的轴。
其中,通过在新列中将元素1添加到来获得。考虑到x分量和y分量独立于参数t,节曲面可以分为非圆柱体,并进一步简化为平面节曲线:
图3展示出了通过设定齿轮比函数,平移速度和初始中心距离= 20来说明VCDG的节曲线。其中 = 60°,120°,240°的三个位置被覆盖以示出变化的中心距离和旋转角度。如图所示。(a)中的中心距离与(b)中的不同,而(b)和(c)中的中心距离由于位置(b)和(c)的。然而,由于的不同符号,接触点在位置上变化,所以可以在(b)和(c)之间找到差异。
从图3和等式(13)中可以看出,接触点位于平面上。这意味着理论上通过设定齿轮比功能和中心距离速度的不同组合,可以实现的任何位置。相反地,对于两个切线(连续和可导出),如果共轭条件满足,则可以将其设置为圆柱齿轮传动的节曲线。可以定义共轭,即在纯滚动中,切点总是在中心线上。然而,对于VCDG,条件相对较宽,可以表示为:任何两个切线曲线,无干扰。换句话说,一对VCDG的节曲线是“非共轭”,并且任何两个没有干涉的切线可用作节曲线。图4示出了偏心圆形节距曲线(左侧的黑色曲线)与不同形状的椭圆形曲线(一阶黑色椭圆,二阶蓝色椭圆,三阶绿色椭圆和四阶黄色椭圆)相啮合。为了清楚地说明“非共轭”的概念,所有的节曲线对与相同的点相切,并且通常可以任意地位于平面上。
图.4. VCDG的“非共轭”节曲线
2.4.成形器
成形器具有特殊类型的表面,用于产生啮合齿轮的表面。 对于VCDG,成形器可以是齿条或圆柱形齿轮,原因如下:
bull;成形器的形状被证明是由两个齿轮的旋转轴之间的空间关系决定的。
▪虽然行驶过程中心距离不同,但驱动齿轮和从动齿轮的转轴保持平行。
▪圆柱齿轮成形器的推导不考虑中心距离。
此外,通过圆形齿轮的生成可以被认为是VCDG驱动的特殊情况:圆形和非圆形齿轮,与图1中的非圆形齿轮成形相同。 同时,机架式发电机可视为VCDG驱动的另一种特殊情况:机架非圆形齿轮传动,与非圆形滚齿机一样。
相比之下,发现VCDG一代是VCDG驱动的特例。 这反过来表明了相同的数学模型对于VCDG的驱动和生成的适用性,就像圆齿轮一样。
考虑到纸张的长度和齿条成形器的局限性,在论文中,圆形齿轮成形器的生成受到限制。 成形器的齿廓设置为常用的渐开线曲线,如图5所示。 参考参考文献 [32],渐开线齿轮成形器的齿面如下:
(20)
其中:
并且是渐开线齿轮的基圆半径,可计算为; 是指压力角。
此外,可以推导出生成表面的法向量:
2.5.包络面
图6展示出了用于生成VCDG的坐标系,与用于第2.1节中讨论的VCDG驱动的坐标系相同。 假设从动齿轮的半径为,产生齿轮的节曲线为,则切向矢量与位置向量之间的角度可以计算如下:
并且角度为:
图.5. 渐开线齿轮成形器的坐标系
图.6. 用于生成VCDG的坐标系
因此,可以根据余弦定律获得中心距离
同时,可以根据正弦定律获得所产生的齿轮的旋转角度
此外,基础端面的旋转角度可以基于正弦定律和纯滚动关系
其中,是成形齿轮的节曲线的长度,计算为:
因此,可以通过将生成表面从坐标系变换为来推导包络方程:
其中,是从到
全文共6410字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 24 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[143509],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

