
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
2010年第二届WRI智能系统全球会议
基于图像设备仪表的数字识别
信息与控制工程系 计算机科学与工程 信息与控制工程系
沈阳建筑大学 同济大学 沈阳建筑大学
中国辽宁沈阳 中国上海 中国辽宁沈阳
摘要
考虑到仪表数字图像背景的复杂性,因此在分析仪表数字化结构的特征时,需要仪器数字图像预处理上的二值图像的动态阈值和全局阈值相结合。在仪器上定位数字,通过开运算消除了模式噪声和去除数字和边界之间的小粘连,利用了连通域筛选方法来实现仪表数字精确定位。讨论了基于特征向量的仪表数字识别方法。结果表明该解决方案的识别率为97.5%,并且识别速度非常快,完全达到了两个识别要求:精度和速度。
关键字 – 图像预处理;数字定位;特征向量;数字识别
I.引言
作为字符识别的一个分支,数字仪表主要是用于车牌识别,身份证识别,各种印刷数字的识别,序列号等等。基于图像的设备仪表数字识别是数字识别设备之一[1] - [3]。有许多数字识别方法,阎国立在《身份证图像数字识别中的一种快速识别算法的应用》一文中提出基于数字交叉点数和基线的识别方法,因为图像质量的严格要求,这个方法只适用于特定情况。吴伟在他的论文《基于豪斯多夫距离的车牌数字识别》中使用了基于模板匹配的识别方法,这种简单的模板匹配抗干扰能力差,计算量大,辨认缓慢。在论文《基于BP神经网络的数字仪表动态显示特征识别系统》中,唐宜君采用了一种基于BP神经的识别方法。在模式识别领域里,神经网络是一种非常重要的方法,在汉字识别,手写数字识别等方面有很多成功的应用,但编程非常复杂,需要太多的训练,所以适用于对象具有复杂的结构特征或者难以鉴别。印刷体数字结构简单;它需要大量的计算并且使用神经网络方法时非常慢。 基于这些现有的方法,本文重点分析了设备仪器数字的结构,提出了一种基于特征向量的仪表数字识别方法,可以识别不同字体和任意大小的数字,这种方法有很好的前景。
II.数字识别的过程
本文使用低价格的OV7670 CMOS图像传感器收集仪表数字图像,因为相机的分辨率非常低,亮度不均匀,所以收集到的仪表数字图像包含大量的噪音并且质量非常低,难以区分数字区域和背景区域,几乎不可能直接从收集的仪表数字图像达到字符识别的目的。基于低价相机的特点,设计了如图1所示的仪表数字图像识别的整个过程。其中,图像预处理可以消除数字模式噪声,从复杂的背景中提取有用的二值仪表数字图象; 数字定位是要正确定位将要识别的仪表数字; 特征提取是要建立数字背景的特征值,确定特征向量; 数字识别是基于特征向量的仪表数字识别方法之一。
数字图像
图像预处理
数字定位
识别结果
数字字符识别
特征提取
图1 数字识别过程
III.图像预处理
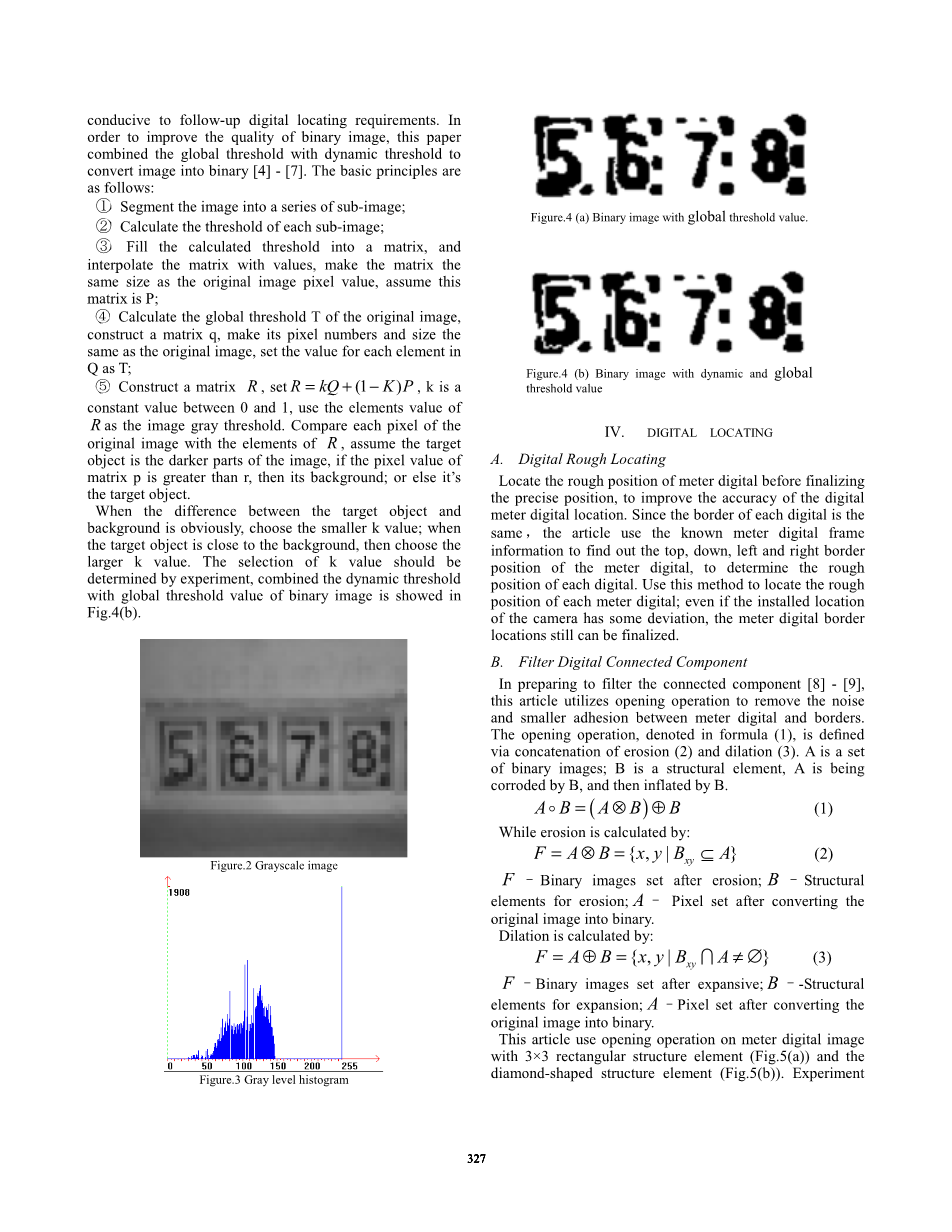
数字仪表的灰度图如图2所示,其灰度直方图如图3所示,数字仪表图像直方图不是双峰分布,所以图像背景是复杂的。当使用全局阈值将整个图像转换成二值图像时,图像会丢失一些有用的信息,而仪表数字和外部边界会有很大的粘连或破裂。如全局二值图像数字(图4(a))所示,“5”和“6”存在与外部边界的粘附,这不利于后续的数字定位要求。为了提高二值图像的质量,本文将全局阈值与动态阈值相结合将图像转换为二值图像[4] - [7]。基本原则如下:
①将图像分割成一系列子图像;
②计算每个子图像的阈值;
③将计算的阈值填充到矩阵中,用值内插矩阵,使矩阵为与原始图像像素值相同的大小,假定矩阵为P;
④计算原始图像的全局阈值T,构造矩阵q,使其像素数和大小与原始图像相同,设置每个元素的值Q为T;
⑤构造矩阵R,设R = kQ (1-k)P,k为a常数值介于0和1之间,使用元素值R作为图像灰度阈值。比较每个像素原始图像与R的元素,假定目标对象是图像的较暗部分,如果矩阵p的像素值大于r,则是背景;否则是目标对象。
当目标对象和背景差异显然,就选择较小的k值;什么时候目标对象和背景差异不明显,就选择较大的k值。 k值的选择应该是通过实验确定,结合动态阈值和全局阈值的二值图像如图4(b)所示。
图2 灰度图像
图3 灰度直方图
图4(a) 全局阈值的二值图像
图4(b) 全局阈值和动态阈值结合的二值图像
IV.数字定位
A.数字粗略定位
在确定精确位置前定位仪表数字的粗略位置,提高数字仪表位置的准确率。由于每个数字的边界都是同样的,本文使用已知的仪表数字框架信息来找到仪表数字的上、下、左、右边界位置,确定每个数字的粗略位置。使用此方法来定位每个仪表数字的粗略位置;即使相机的安装位置有一些偏差,仪表数字边界位置仍然可以确定。
B.过滤数字连接组件
准备过滤连接的组件[8] - [9]时,本文利用开运算来消除噪音和仪表数字、边界之间较小的粘连。如公式(1)所定义的开运算通过腐蚀(2)和膨胀(3)的连接确定。A是一系列的二值图像; B是一个结构元素,A是被B腐蚀,然后被B膨胀。
A B =(Aotimes;B)oplus;B (1)
腐蚀计算如下:
F = Aotimes;B = {x,y | Bxysube;A} (2)
F - 腐蚀后二值图像集; B – 腐蚀的结构元素;A – 将原始图像转变成二值图像的像素集。
膨胀计算如下:
F = Aoplus;B = {x,y | Bxycap;Ane;empty;} (3)
F – 膨胀后的二值图像集;B – 膨胀的结构要素;A – 将原始图像转变成二值图像的像素集。
本文在仪表数字图像上使用带有3times;3矩形结构元素的开运算(图5(a))和菱形结构元素(图5(b))。实验表明3times;3矩形结构元素可以消除亮点的干扰,但如果字符内的连接较弱会有字符错误,如图6(b)所示的数字“7”。钻石结构元素可以保持良好的字符形式,而且仪表数字与边框的粘连可以消除,消除一些小点的影响,如图6(c)所示数字“7”。
|
1 |
1 |
1 |
|
1 |
1 |
1 |
|
1 |
1 |
1 |
|
0 |
1 |
0 |
|
1 |
1 |
1 |
|
0 |
1 |
0 |
图5(a) 矩形结构元素 图5(b) 菱形结构元素
图6(a) 原始二值图像
图6(b) 采用矩形结构元素的二值图像
图6(c) 采用钻石结构元素的二值图像
这文使用二次扫描标记算法来标记连接组件[10],具体实现方法如下:首先,从左到右,从上到下扫描图像。如果当前像素的灰度级别是255,移动到下一个扫描位置。如果当前像素的灰度级为0,检查其四个相邻像素,分别位于左,左上,上,右上(取决于扫描顺序,当到达当前像素时四个相邻像素已被处理)。如果四个相邻像素的灰度级都为255,为当前像素分配一个新的标签值。如果四个相邻像素只有一个像素P的灰度级为0,为当前想输分配P像素的标签值。如果四个相邻像素具有m(1 lt;= m lt;= 4)个像素灰度值为0,按照左,左上,上,右上的优先级,确定当前像素标签的值。然后等效这m个像素的标签值,并将其放置进一个数组。例如,如果四个像素的灰度值为0,将左像素值的标签分配给当前像素,然后使左像素值等于左上像素值,左像素值等于上像素值,左像素值等于右上像素值,最后插入三个等效值进等价数组。第一次扫描后,全部灰度值为0的点已被标记,但有一些标记是等效的。
排列等价数组;使等效值等价关系。根据重新标记的等价关系,再次扫描图片。第二次扫描后,灰度值为0的所有目标区域都标有不同的标签值。基于不同的标签值区分不同的连接组件。标记的连接组件的结果如图7(b)所示。
图7(a) 原始二值图像 图7(b)二值图像标记的连接组件
标记连接组件后,根据尺寸和连接部件的位置,开发两个过滤条件来选择连接组件。
- 为第i(1 lt;= i lt;= n)个连接组件设置大小,设置两个区域阈值,(lt;),如果lt; ,表示连接的组件尺寸太小,这意味着它受到一个小点的影响,应该直接删除;如果 lt; lt; ,转到下面的条件②;如果 gt; ,连接的组件不能删除。
- 设置连接组件重心位置为(,),alpha;,beta;是比例因子(alpha;,beta;lt;0.5),字符边界高为H,宽为W,当组件的检查连接性不能满足条件(4)和(5),则删除。
alpha;Wlt; lt;(1- alpha;)W (4)
beta;H lt; lt;(1-beta;)H (5)
来自过滤的连接组件的二值图像如图8(b)所示,它删除了大部分小斑点噪声和一些字符粘连,可以非常好地满足数字精确定位的要求。然后使用图像水平和垂直投影,删除上,下,左,右边界,数字精确定位如图8(c)所示。
图8(a) 图像开运算 图8(a) 图像连接组件过滤
图8(c) 数字精确定位
V.数字识别算法
A.建立数字特征值
首先,将背景中的每个点向上,下,左,右引出,如果在方向3上遇到目标像素,特征值加1;如果在方向1上遇到目标像素,特征值加2;如果在方向2上遇到目标像素,特征值加4;如果在方向4上遇到目标像素,特征值加8;然后得到背景点的特征值[11]。详细过程如图9所示。
方向4
方向3
方向1
方向2
图9 数字背景表示
数字的特征将在图像预处理后归一化,每个背景点以及扫描线必须在四个方向上遇到目标像素,背景点转变为十五( = 15)个不同的特征值。例如,如果指向左和右方向的背景点遇到目标像素,则其特征值为2 1 = 3;如果背景点左和下方向遇到目标像素,特征值为2 4 = 6;如果背景点在四个方向遇到目标像素,特征值为8 4 2 1 = 15;根据这个可以得到所有情况下背景点的特征值;所有的特征值和背景类型都列在表I中。
表I 特征值和背景类型
全文共7254字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[142695],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
特征值 |
背景类型 |
特征值 |
背景类型 |
|
0 |
8 |
只存在于上边的目标像素 |
|
|
1 |
只存在于右边的目标像素 |
9 |
只存在于右和上的目标像素 |
|
2 |
只存在于左边的目标像素 |
10 |
只存在于左和上的目标像素 |
|
3 |
只存在于左与右的目标像素 |
11 |
除下边都存在的目标像素 |
|
4 |
只存在于下边的目标像素 |
12 |
只存在于上和下的目标像素 |
|
5 |
只存在于右与下的目标像素 |
13 |
除左边都存在的目标像素 |
|
6 |
只存在于左与下的目标像素 |
14 |
除右边都存在的目标像素 |
|
7 |
除上边都存在的目标像素 |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

