
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于STM32Marta的宽带空中声纳原型
本文介绍了宽带空气声纳的低成本原型版本及其开发过程中出现的问题。这项工作的目的是利用任意形状的宽带信号创建周围环境的反射率图设计一个短程空气声纳。为这种应用选择的发射和接收换能器通常工作在脉冲操作模式。因此,必须设计专用输出和输入电路来扩展其功能而不造成信息损失。信号发生,发送,接收和存储由具有STM32微控制器的Discovery评估板管理。接收的数据保存在SD卡中,并进行离线处理。
关键词:成像声纳; STM32;超声换能器
1引言
设计系统的基本假设是由各种潜在的应用决定的。最受欢迎的航空声纳成像应用是合成孔径声纳(SAS)。传感器沿假定轨迹(通常是直线)移动,并记录扫描区域的回波。特殊信号处理算法允许将这些回波变换成反射率图并获得地形的高分辨率图像(Hansen,2011; Kawalec,2010)。另一种流行的应用是逆合成孔径声呐(ISAS)。静止的传感器记录来自移动物体的回声,并且专用算法允许获得目标的图像。Serafin等人提出了这种系统的操作原理和初步结果。(2017年)。空声纳还可以在有限空间内探测到小物体。在这种情况下,物体的大小由反射率定义,反射率定义了它在接收信号中的回波电平。最好的例子是无人机,它通常呈现出弱的回声。另一个潜在的应用是使用空气声纳作为移动机器人的导航传感器。检测障碍物帮助他们在房间周围导航。
为了在上述成像应用中使用空气声纳,系统必须是便携式的。这意味着它必须具有尽可能小的封装尺寸,并且必须由电池供电。成像应用需要宽的信号带宽,以便在范围分辨率方面实现更好的图像质量。假设信号的载波频率为50 kHz和至少10 kHz的带宽。在这个频率范围内,该设备不应该引起任何信号失真。
2系统设计
声纳系统就像雷达系统包含发射和接收通道,控制单元和处理单元(Richards,2005)。声纳的功能框图如图1所示。
图1 声呐功能框图
线表示功率路径和粗体信号路径。根据这些假设,整个系统由一个12 V小型Li-Pol电池供电。作为控制单元,应用了STM32F4微控制器。为了降低系统成本并避免设计处理器工作所需硬件的必要性,使用了具有包括SD cardocket的扩展板的STM评估“Discovery”套件。原始接收数据存储在外部存储器中,处理操作在PC应用程序中离线执行.SensComp(Polaroid)的超声波传感器系列600 Instrument GradeTransducer被选中。它在所考虑的频带中具有平坦的接收和发射特性。它是一个静电传感器,它需要高的工作电压范围,最大值为400 V,偏置电压在150 V和200 V之间。根据其数据表,在其标称应用中,它可以达到15米的最大范围,如果使用合适的驱动器,则分辨率为3毫米。在原型系统中使用STM32和SensComp系列600传感器并不是一个新想法。Holocomb等人(2015)使用这些组件来设计宽带超声波记录系统。在他们的解决方案中,没有必要传输信号,因此传输信道不在那里。
2.1传输信道
Sample Electronics(n.d.)公司提出SensComp 600系列传感器的发射和接收电路的设计标准。 他们假定使用变压器来获得所需的电压范围。仿真证明,它仅适用于短脉冲信号,如图2所示。
图2 由Samples提出的通过传输路径的信号通道
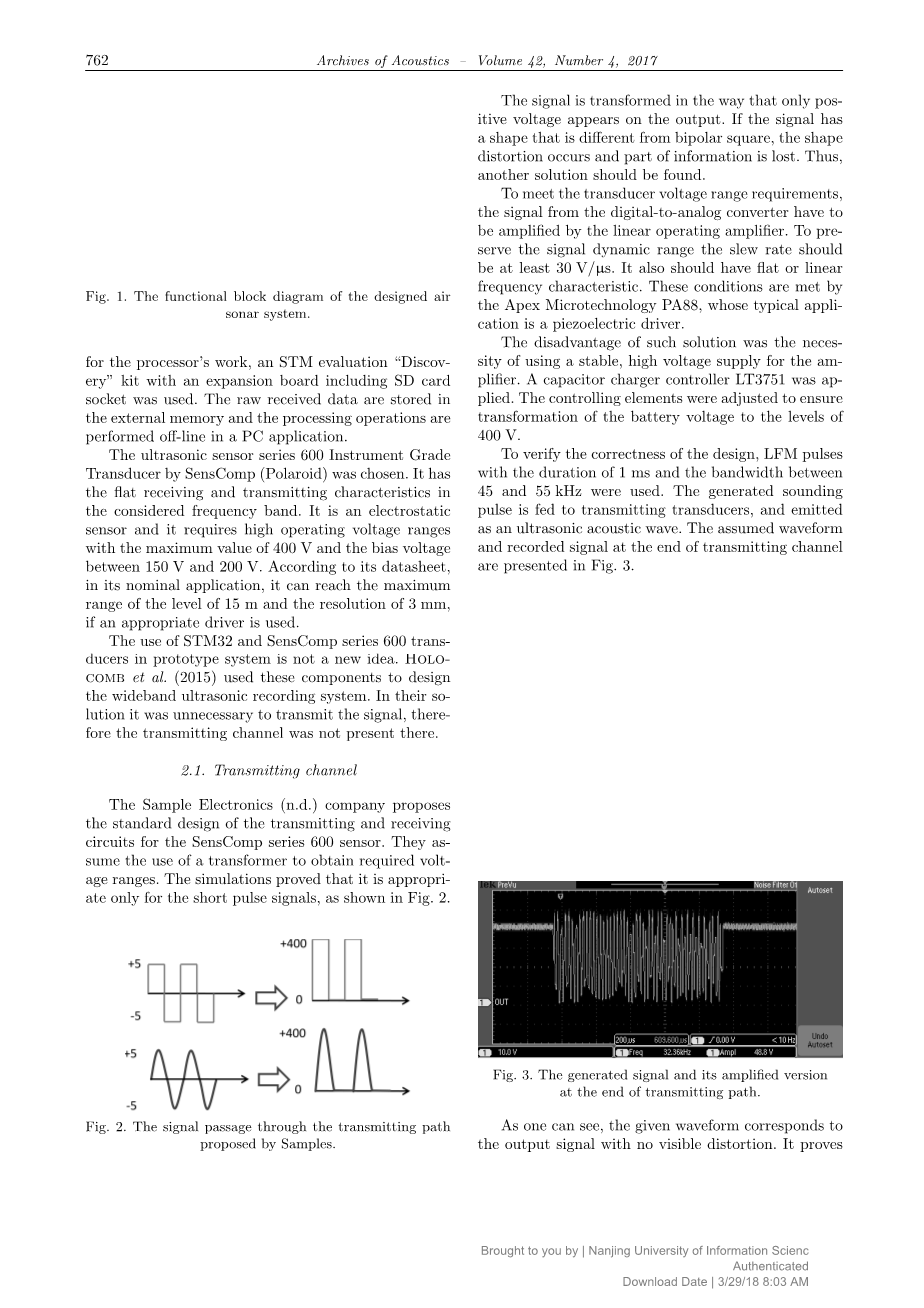
信号的变化方式是只在输出端出现正电压。如果信号具有不同于双极方形的形状,则会发生形变并且部分信息丢失。因此,应该找到另一种解决方案。为了满足传感器电压范围要求,来自数模转换器的信号必须由线性运算放大器放大。为了保持信号动态范围,摆率应至少为30 V /mu;s。它也应该具有平坦或线性频率特性。Apex Microtechnology PA88满足了这些条件,其典型应用是压电驱动器。这种解决方案的缺点是必须为放大器使用稳定的高压电源。采用电容器充电器控制器LT3751。控制元件进行了调整,以确保将电池电压转换为电池电压400 V.为了验证设计的正确性,使用了1 ms持续时间和45到55 kHz带宽的LFM脉冲。产生的探测脉冲被送到发射换能器,并且被发射作为超声声波。假设波形记录信号在传输通道结束时呈现在图3中。
图3 在传输路径的末尾生成的信号及其放大版本
可以看出,给定的波形与输出信号相对应,没有可见的失真。证明设计的发射通道工作正常。所需的150 V偏置电压清晰可见。
2.2接收信道
被观测物体反射的超声回波被另一个换能器接收并转换成电压变化。接收通道的主要目标是将来自传感器的信号转换为STM32模数转换器(ADC)输入的电压范围,即0-3V。该功能由图4所示的电路实现。
接收通道的三个主要部分可以被区分开来。第一个是取消偏置电压的RC高通滤波器。下一部分是一个求和放大器,它为信号增加了一个小的不变分量。其数值由R41和R42阻值的比值决定。除了它的主要功能之外,线性运算放大器U2由于其频率带宽,还可用作具有截止频率在100 kHz左右的低通滤波器。经过预处理的信号被放大器U3放大到所需的电压范围。所提出的信号转换顺序允许为每个模块保持单极电源。
为了验证接收通道设计的正确性,我们进行了简单的实验。声纳传感器在距离彼此70厘米处放置,传输的信号直接接收并由接收通道测量。这样的安排确保了最高的输入信号强度。实验的结果在图5中以波形图(幅度与时间)表示。接收信号在波形图中清楚地看到,但是也存在来自发送信道的干扰。 “泄漏”信号具有比接收信号更高的幅度。干扰源可能是通过地面路径传播的信号。这种干扰当然是一种不必要的因素,但可以用来同步连续的回声记录,并且可以在后处理软件中进一步删除。在进一步的系统开发过程中,这种现象将被消除。
图4 接收信道的方案
图5 接收信道结束时的信号幅度与时间的关系。
3结果
设计声纳的原型已经被用具有强反射性的物体测试过,即具有方形反射区域的三面体锥体。 设计的设备和测试场景在图中6给出。
图6 原型设备和测试场景
第一次测试的目的是检查SD存储卡上的信号存储的正确性。图7显示了实验的结果,所存储的信号表示所接收的高保真信号。发生的直流偏移与ADC输入电压范围0-3V相关联。
图7 从反射锥体反射的信号
从潜在应用的角度来看,下一个重要参数是空气声纳距离分辨率。 其理论值可以通过以下表达式估算(Richards,2005):
dR = v/2B
其中v是声波传播速度,B是发射信号带宽。 在我们的情况下,距离分辨率应该在1.7厘米的水平。为了验证这个值,两个反射锥被放置在声纳传感器的前面。他们的相互距离在0厘米和5厘米之间以1厘米为单位在变化。 重新映射的回波信号被存储并随后被压缩。反射器回波可区分的最后距离被指定为空气声纳的距离分辨率。 图8给出了两次连续扫描中记录的物体的回波。 它证明了接收结果是可重复的,它们之间的任何差异都与噪声有关。还可以看出,约2厘米的距离确保了回声分离。 结果表明,空气声纳的实际分辨率与其理论值一致。
图8 在两次连续扫描中记录两个相隔2厘米的物体的回声
类似的情况被用来验证声呐范围。将反射锥从转换器移开并记录回波信号的电平。物体在信号中不可见的距离被指定为声纳范围。所使用的反射锥体具有0.25平方米的反射面积,并且它们的空气声纳范围为5m左右。为了成像和扫描目的,空声纳就是为此而设计的。如前所强调的,项目假设之一是设计声纳的低成本,包括元素的价格和所谓的开发成本,总金额不超过200 AC。对于这种设备的原型来说这是一个相当合理的价格。
4总结
本文介绍了以STM32微控制器作为控制单元的宽带空气声纳的设计。该设计理论上满足了价格,带宽,分辨率和系统测距范围。进一步的工作将涉及信号纯度的改善。特别是接收通道需要进一步的工作来扩展电压范围并将有效滤波带仅缩减到发送信号的频率。还有使用更宽频带的操作放大器。虽然设备还需更深层次的研究,但制备好的空气声纳在信号处理的研究工作中很有用。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[22036],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

