
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于动作识别和自适应阻抗控制的康复机器人主动交互控制
Wei Meng, Yilin Zhu, Zude Zhou, Kun Chen, Qingsong Ai
School of Information Engineering, Wuhan University of Technology
Key Laboratory of Fiber Optic Sensing Technology and Information Processing, Ministry of Education
Wuhan, Hubei 430070, China
摘要:虽然肌电信号与交互力已经被广泛应用于患者的协助或交互训练,但是传统的基于EMG的控制通常将过程分解为患者的主动控制期和单独的被动控制期。在这项研究中,提出了基于动作识别和自适应阻抗控制的方法并应用于一个六自由度并行机器人的下肢康复训练中。结合支持向量机(SVM)分类器与EMG信号的均方根(RMS)特征来在线预测下肢的运动意图并提前触发机器人进行辅助。采用阻抗控制策略来直接影响机器人辅助速度,并让训练遵循生理轨迹。此外,自适应方案能实时获知肌肉活动水平,并根据患者的自愿参与力度来调节机器人的阻抗。对几个健康受试者的实验结果表明,可以提前精确的预测下肢的运动意图,并且机器人辅助模式也可由人机相互作用和肌肉活动水平来调节。与传统的EMG触发辅助方法相比,这种策略可以增加患者的积极性,因为受试者的运动意图、主动程度以及肌肉活动水平变化都可以直接反映在轨迹模式和机器人辅助速度中。
关键词:康复机器人;EMG;动作识别;阻抗控制;主动交互控制
第一章 引言
显然,我们社会的快速老龄化趋势比预期的还要强烈。根据联合国的官方统计数据,在2000年至2050年期间,世界60岁以上人口的比例将从11%增加一倍,达到22%。与此同时,肢体骨折通常因运动损伤、交通事故和其他意外伤害而发生。随着社会老龄化的趋势,医疗保健和康复的需求大大增加,特别是老年人和残疾人群体[1]。机器人辅助康复训练在恢复肢体运动功能中具有重要作用。此外,在康复期间,评估患者的康复情况和提供适当辅助的主动交互控制策略是非常需要的[2]。Marchai-Crespo等人总结了基于患者参与表现的辅助策略方法与技术的系统概述[3]。
由于EMG信号包含了肌肉活动的许多关键信息,并且可以提前30~100ms反映人的运动行为[4],它们已经被广泛应用于临床诊断、康复、假肢控制以及人机交互中。近年来,已经提出了许多从EMG信号中提取有用信息的方法[5]。然而,大多数研究都是对上肢进行的[6]。例如,Kiguchi等人提出了一种基于EMG信号的方法,根据使用者的运动意图来控制上肢机器人。此方法通过使用十六个通道的EMG信号来预测上肢的运动情况[7]。Krebs等人描述了一种基于表现的渐进疗法,通过使用EMG信号来启动机器人辅助[8]。在这项研究中,收集了上肢14个肌肉的EMG信号,并且当一个肌肉的活动增加到阈值以上时触发机器人。这种EMG触发的辅助鼓励患者进行自发运动,然而该方法可能无法获得令人满意的康复效果,因为它将运动分成了由患者驱动的主动期和由机器人驱动的被动期的两个独立阶段,而不是为受试者提供无缝对接的帮助[9]。
EMG触发辅助的潜在问题是它不考虑患者的参与程度。患者的恢复水平可以由EMG信号反映,而自愿参与程度则与患者和机器人之间的交互作用力有关。根据患者的残疾水平及其自愿参与程度已经开发了几种控制策略来提供机器人的辅助。交互式训练策略主要是通过阻抗控制器来实现。为了提供交互式机器人步态训练,在文献[10]中开发了基于阻抗控制的按需辅助步态训练方法,并在整个实验期间都应用了恒定的跑步机速度。类似地,Duschau-Wicke等人为了将患者的腿保持在期望路径周围的隧道内,提出了具有虚拟墙的路径控制策略,并在整个实验中采用了恒定的跑步机速度[11]。众所周知,自适应阻抗辅助的基础是以患者所期望的方式调节机器人的运动,并且这被认为是最适合于康复的方法。然而,参考轨迹适应的问题具有一些缺点,例如,轨迹适应的程度不能很好地确定,并且轨迹的变化有可能导致非生理模式。为了解决这个问题,可以根据人机交互来调整机器人的辅助速度。Duchaine等人设计了一个使用力来感知人的意图的可变阻抗控制器,并且这项工作还证明了为什么应该在机器人中使用速度控制,而不是典型的位置控制[12]。在这种情况下,期望的生理轨迹会被严格遵守,并且还可以获得患者影响的速度变化。与基于轨迹的训练相比,此设计可以为患者在训练过程中积极贡献他的肌肉努力提供更好的机会。
在本文中,提出了一种基于运动识别和自适应阻抗控制器的主动交互控制策略,并应用于一个六自由度并联下肢康复机器人。为了提前预测下肢的运动意图,创建了基于RMS特征和SVM分类器的简单为有效的识别控制器。为了增加患者在锻炼期间的积极性并保持生理路径,设计了阻抗控制器以使机器人速度适应患者的努力。此外,开发了用于提供所需辅助的机器人辅助的自适应方案。控制器考虑了患者的肌肉水平和人机交互,以此适应机器人的柔顺性和辅助速度。所提出的策略允许患者通过识别EMG信号来确定轨迹模式,并在康复期间影响他们腿部沿着生理路径的运动速度。
第二章 材料和方法
A.六自由度并联下肢康复机器人
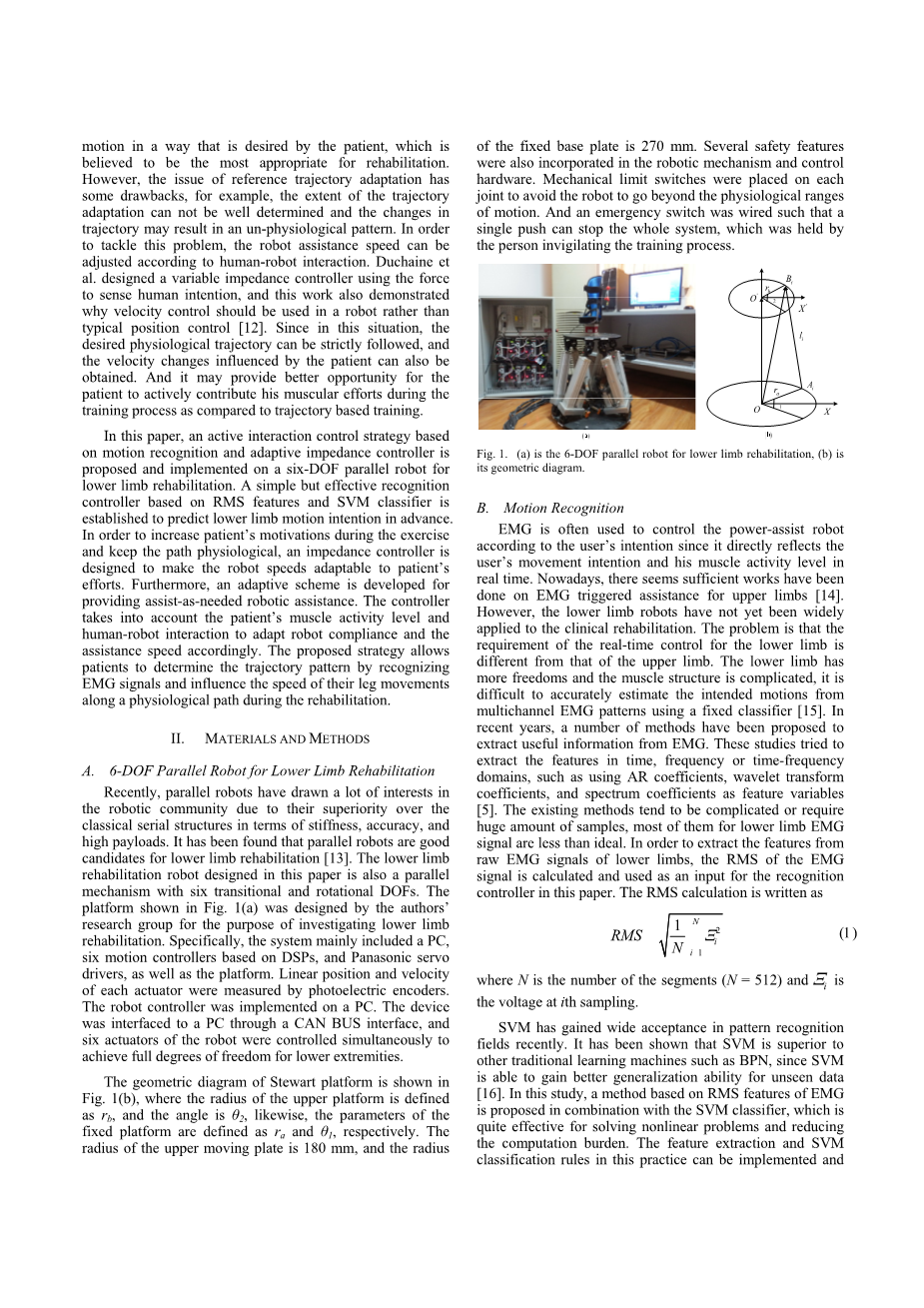
最近,并联机器人在机器人领域引起了很多兴趣,因为它们在刚度、精度和高有效载荷方面优于经典串联结构。人们已经发现,并联机器人是下肢康复的良好候选品[13]。本文设计的下肢康复机器人也是一种具有六个过渡和旋转自由度的并联装置。图1所示的平台是由作者的研究组设计的,旨在研究下肢康复。具体来说,系统主要包括PC、基于DSP的六个运动控制器、松下公司的伺服驱动器以及平台。其中每个驱动器的线性位置和速度由光电编码器测量,机器人控制器在PC上实现。该设备通过CAN总线接口连接到PC,并且同时控制六个驱动器以实现下肢的完全自由度。
Stewart平台的额几何图形如图1所示。如图1(b)所示,上平台的半径定义为,角度为,同样,固定平台的参数非别定义为和。上移动板的半径为180mm,固定基板的半径为270mm。机器人装置和控制硬件中还包括几个安全功能。在每个关节上放置机械限位开关,以避免机器人超出运动的生理范围。此外调整训练过程的人拥有一个紧急开关,使得单次推动可以停下整个系统。
图1. (a)是六自由度并联下肢康复机器人,(b)是其几何模型
B. 动作识别
EMG信号通常用于根据用户的意图控制助力机器人,因为它直接实时反映用户的运动意图及其肌肉活动水平。如今,似乎已经有足够的研究成果来完成上肢的EMG触发辅助了[14]。然而,下肢机器人仍未广泛应用于临床康复。其主要问题是对下肢的实时控制的要求不同于上肢的实时控制的要求。下肢具有更多的自由度,肌肉结构复杂,难以使用固定分类器从多通道EMG模式中精确估计预期运动[15]。近年来,已经提出了许多方法来从EMG信号中提取有用信息。这些研究试图提取时间,频率或时—频域中的特征,例如使用AR系数,小波变换系数和频谱系数作为特征变量[5]。现有的方法往往是复杂的或需要大量的样品,其中大多数对于下肢EMG信号的提取都不理想。为了从下肢的原始EMG信号中提取特征,在本文中计算了EMG信号的RMS,并将其用作识别控制器的输入。RMS计算写为
(1)
其中是分段的数量(),是第次采样的电压。
近年来,SVM在模式识别领域已经得到了广泛的认可。SVM已经被表明优于其他传统学习机器,如BP神经网络,因为其能够为未见数据获得更好的泛化能力[16]。在这项研究中,提出了一种基于EMG信号的RMS特征与SVM分类器结合的方法,此方法对于解决非线性问题和减少计算负担是非常有效的。在本实践中的特征提取和SVM分类规则可以实现,因此适合于实时机器人控制应用。在我们的工作中应用的分类器的结构图如图2所示。关于SVM的更详细的描述可以在论文中[17,18]找到。本文应用的方法的主要优点是它可以在下肢运动期间用于实时动作识别,并相应地提供机器人辅助。
图2. 基于EMG的动作识别分类原理
C. 自适应阻抗模型
为了在触发机器人之后提供互补环境,可以通过监测用户和机器人之间的相互作用力来提供灵活的辅助。因此,创建了导纳或基于位置的阻抗控制器。通过测量用户施加到足板的相互作用力,可以计算出给定质量、刚度和阻尼特征所需的参考位置和速度[19]。与人有交互作用的装置的阻抗模型表示为:
(2)
其中,,和分别表示机器人的目标惯性、阻尼和刚度矩阵,和分别是笛卡尔空间中的实际位置和期望位置。是末端执行器上的交互力,是期望的交互力。
传统的阻抗控制器对患者施加固定参数,并且不能向不同用户提供不同的阻抗模式。如果阻抗设置过于僵硬,患者感觉被动移动;如果设置太软过于柔顺,患者可能会移动在非期望的模式中[11]。因此,应通过监测患者的肌肉状况并实时更新阻抗参数来考虑康复。在本文中,患者的肌肉活动水平在运动期间就被考虑了。EMG信号的归一化RMS用于计算肌肉活动比得:
(3)
其中,表示在时间时第通道内的RMS值,是第个通道的初始值(在训练阶段),四个通道的EMG信号都使用(n=4)。
为了保证训练是符合生理要求,该控制器应以恒定的参考轨迹工作,同时适应不同的速度。因此,控制器的阻尼系数是要调整的参数。当检测到少量肌肉活动比时,将阻抗(这里的阻尼)设置得较低,从而可以轻易地改变机器人的辅助速度来适应患者的主动性。一旦检测到增加的肌肉活动比,阻抗就增加,使得患者可以尽力克服挑战。参考轨迹不变,只有阻尼参数B调整如下:
(4)
其中,是初始阻尼系数,是EMG效应的系数,是受EMG信号影响的肌肉活动比。是饱和函数以使最大和最小饱和水平之间的区域线性化。因此,当相关的下肢肌肉的活动水平同时增加时,阻尼参数B的量增加。
在这种积极的交互训练中,需要患者的自愿参与。机器人的速度与主动交互力成正比,转换公式可以通过阻抗模型给出[20]。自适应阻抗控制器的架构如图3所示。下部环路是具有阻尼参数的阻抗控制,上部环路是位置/速度控制器。这种结构表明,为了实现更高的训练速度需要更积极的交互作用力。 同时,可以根据从EMG信号计算的肌肉活动水平来改变针对不同训练阻力的阻尼系数。肌肉能力越高,阻尼越大,因此需要贡献更多的主动力来达到相同的运动速度。
图3. 基于肌肉活动评估的自适应阻抗控制模型
D. 主动交互控制
在本文中,我们提出了一种用于人类下肢运动辅助的多自由度并联机器人,其中EMG信号和主动交互作用力与自适应阻抗控制器结合,以实现为机器人用户提供有效运动辅助。本研究中的主动交互控制过程包含四个步骤,如图4所示:(1)EMG信号采集和预处理,包括滤波和放大;(2)通过EMG信号的RMS特征和SVM分类器的结合来进行肢体意图预测和运动解码;(3)实时更新阻抗参数和关节速度命令,提出了将肌肉活动比与阻尼参数相关联的控制定律,以便根据人的交互作用力调节训练速度;(4)基于逆运动学和模糊自适应控制来遵循预定义的平滑轨迹。并联康复机器人具有六个自由度,基于模糊控制器的轨迹跟踪方法被作为位置/速度控制器来引导受试者的肢体在参考轨迹上行进[1]。由于人类控制的参与,患者在运动期间的积极性将必然增加。这样的策略可以增加患者的动机,因为肌肉活动的变化和交互程度会直接反映在训练速度中并给予患者与成功一样的感觉。
图4. 康复机器人主动交互控制流程
第三章 实验与结果
A. 实验方案
为了评估康复机器人为下肢提供交互式康复的能力,将前述的机器人和控制器在初步实验中实现。表面EMG信号由便携式EMG信号采集仪获得,如图5(a)所示。此外,Futek力传感器安装在移动平台和脚踏板之间,以感测人和机器人之间的等效交互作用力。
图5. (a)是EMG采集设备,(b)是EMG电极的位置,(c)是实验装置
用年龄范围在20至42的9名受试者进行实验,包括男性和女性受试者。实施了包括背屈、跎屈、内翻、外翻、内收和外展在内的六个动作[13]。在实验前,将四个电极分别附接在对应肌肉上。实验中选择受试者右腿的腓肠肌、胫骨前肌、趾长屈肌和比目鱼肌进行试验。电极的位置如图5(b)所示。经过一个熟悉阶段后,受试者站在椅子上,右脚被约束在矫 正器上,如图5(c)所示。考虑到安全性问题,用健康受试者进行初步测试。未来,将会改变机器人以适应受伤的人,并配备一个高度可调的椅子来使受试者更舒服。
进行了两种形式的实验来评估所提出的控制方法的有效性。在第一个试验中,所有受试者用机器人的被动辅助进行下肢运动。在这种被动的康复模式中,要求受试者在机器人被触发后不施加任何力并保持松弛,并且控制机器人按照预定义的轨迹行进。然后进行基于实时肌肉活动评价和参数更新的主动控制的实验,其中调整阻抗参数以允许患者自己改
全文共12187字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144669],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

