
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于STM32的智能巡线象棋机器人
摘 要
本文描述了一种以STM32微处理器为核心的智能巡线象棋机器人。其系统硬件主要包括检测电路、主控电路、电机驱动电路、舵机驱动电路和拨盘开关等,本文详细介绍了该系统的硬件结构和软件流程。该机器人由后轮电机驱动,根据红外传感器采集到的路径信息来确定机器人的实时位置,并由前轮安置的舵机1对机器人的行进方向进行调整。机器人机械手的张开角度由舵机2进行控制,使其在行进过程中能够快速准确地移动棋子。实测表明,该智能巡线象棋机器人可以较好地完成任务。
关键词: STM32;智能机器人;巡线;红外检测;舵机;探测电路
0引言
智能寻线机器人是机器人的一种系统,可以实现自主运动,通过感知环境和自身条件的传感器[1]实现一定的功能。在汽车电子的背景,设计该系统由几个创新的模块,如机械、电子技术、传感器技术和控制。
STM32芯片在智能寻线象棋机器人作为主控制芯片采用,它拥有先进的内核配置,功耗和性能良好的控制,红外传感器用于收集地面信息和机器人由后轮电机驱动[2]。机器人的移动方向是由前轮的转向机,自动线跟踪功能的机器人是一个快速和稳定的方式取得的确定。此外,机器人的机械手是由一个舵机和棋子控制可移动机器人的稳定和准确。
1工作原理
1.1控制系统结构图
控制的智能巡线机器人系统如图1所示,主要由检测电路、主控制电路、电机驱动电路、舵机驱动电路和电源模块。
图1控制系统结构框图
对智能机器人的动作过程可分为8个步骤:行走、旋转、线路跟踪、定位旋转、武装、启动按钮、状态选择和功率.three-roller体在设计机器人和机械手安装在机器人的前面抓住并移动棋子的采用,它的开启角度由舵机控制。七红外传感器安装在机器人的前面的方向,向地面和其他五个红外传感器也安装在两侧的机器人在向G轮分别。这样,机器人的行驶条件下可快速检测准确的。
1.2机器人的行走路径
机器人要在规定的时间内移动,然后依次把棋子“居”、“炮”、“马”的立场,“帅”根据有关国际象棋的规则,“象”是不动的棋子,棋盘的设计是网络因素所示。
图2棋盘示意图
2硬件设计
2.1电源电路
本系统采用双电源供电模式。
1)相对于stm32, 4.2V锂电池供电使用,并且可以通过ht7333芯片调整为3.3 V,STM32的恒定电源可以实现[3]。
2)直流电机用于驱动后轮,和一个低压差稳压器spx29302达到后轮电机和舵机的恒流电源。
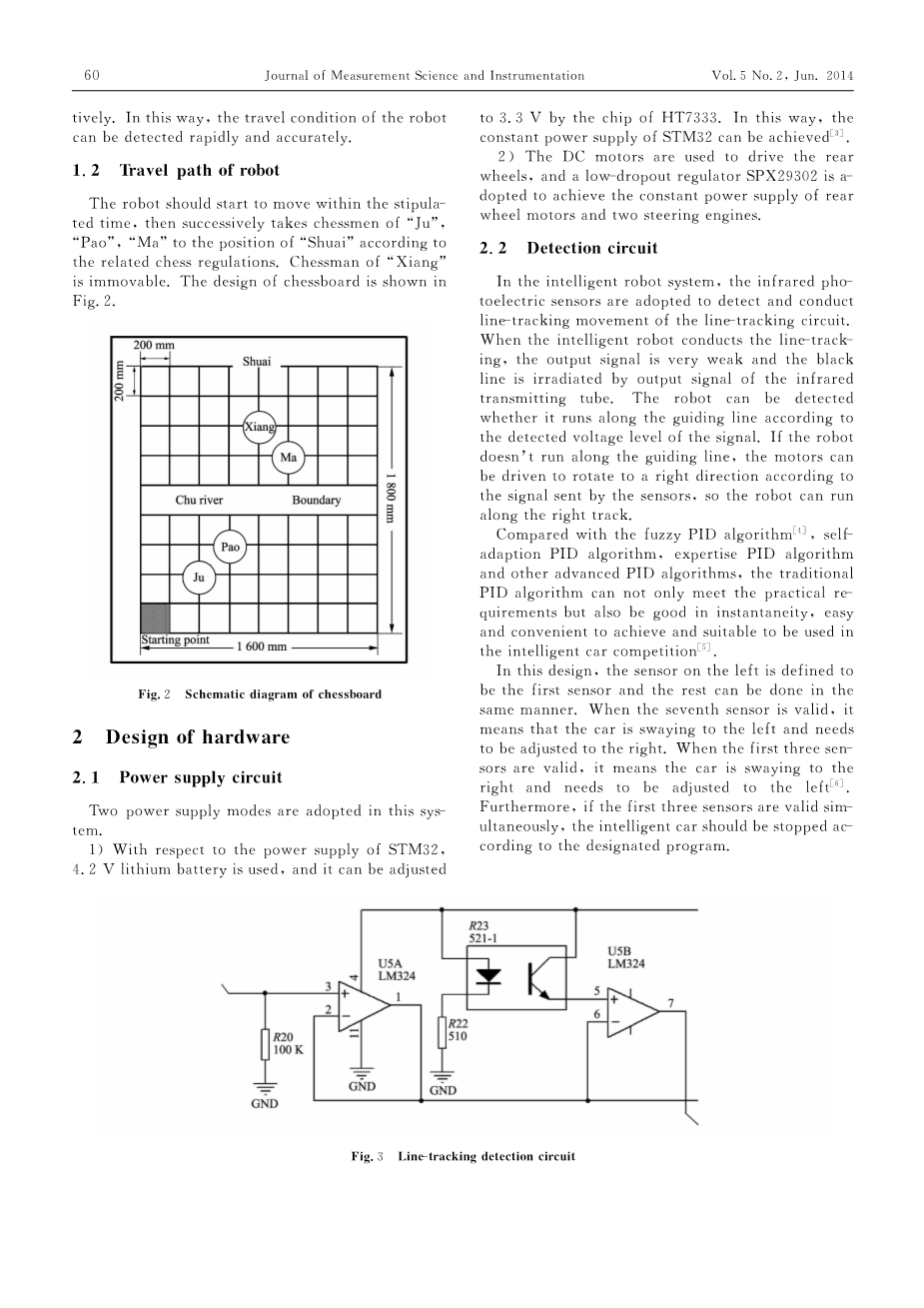
2.2检测电路
在智能机器人系统中,采用红外光电传感器检测并进行直线跟踪运动,当智能机器人进行线跟踪时,输出信号很弱,通过红外发射管输出信号,机器人可以检测到信号的检测电压水平,当机器人没有沿直线运动时,可以根据传感器发出的信号向正确的方向转动,从而使机器人沿着正确的轨迹运动。
采用模糊PID算法[4]相比,自适应PID算法,PID算法的专业知识和其他先进的PID算法,PID算法不仅能满足实际要求,而且实时性好,很容易和方便的实现,适用于智能车竞赛[5]。
在本设计中,左侧的传感器是第一个传感器和其余的可以以相同的方式完成。第七传感器时是有效的,这意味着汽车摇晃的左侧和需要调整的权利。当三个传感器都是有效的,这意味着车摇晃的权利和需要调整到左[6]。此外,如果前三个传感器是有效的同时,智能车应停止根据指定的程序。
图3线跟踪检测电路
2.3控制算法
经典的PID控制算法是通过在设计,其中采用PID控制可以产生快速和先进的控制效果和显著的改善了系统的动态性能指标。伺服转向控制框图显示在图4。PID控制在电机速度控制采用PID控制是一种比较理想的控制[7]其中集成元件的基础上采用比例控制元件和剩余误差是可以消除的。此外,分化是元进一步采用和改善系统稳定性,电机速度控制框图如图所示。
图4伺服转向控制框图
图5块图的电机转速控制
2.4电机驱动电路
智能寻线机器人是由后轮电机驱动和直流H桥驱动电路是用来控制电机的双运动[8]。双H桥电路来驱动电机。电机的正反向运动可以通过调整状态的三极管进行实现,和电机的旋转速度可以通过调节脉冲宽度调制(PWM)控制H桥电路的输入。
2.5转向发动机驱动电路
舵机是一种位置(或角度)伺服驱动器,适用于控制系统中的角可以稳定但需要不断变化,其工作原理是:控制信号传送到信号调制芯片通过接收隧道使直流偏置电压可以得到[9]。里面有舵机可产生20毫秒的时间和必要的[10]宽度参考信号电路与电位器的电压获得的直流偏置电压,输出电压的差异可以得到。
一个20毫秒时基脉冲宽度通常在舵机的控制要求,而脉冲高电平部分控制的角度在0.5毫秒至2.5毫秒。机器人的位置可通过检测电路和舵机的角度调整收购可以通过合适的PWM控制和输出通过STM32。舵机控制电路如图5所示。
图5舵机控制电路图
2.6拨码开关
鉴于国际象棋机器人可能偏离跑道的环境因素的影响(如光照强度、地面平整度和网站的流失率)的旅行过程中,机器人无法完成整个课程的同时,也允许继续下一个任务只完成后一周期性任务。针对这一问题,拨码开关[11]中使用这种设计,有三种工作模式,如下。
1)机器人开始从“起点”,并先后移动棋子的“居”、“炮”、“马”的立场,“帅”。我们把拨码开关1为“上”和复位拨码开关2、拨码开关3和开关4。
2)如果机器人偏离了棋盘上移动棋子后“居”的立场,“帅”,机器人应该回到“起点”,其主体应垂直放置,在这个时候。然后,它开始从“起点”再次,依次移动棋子“炮”和“马”的立场,“帅”又回到“起点”最后设置拨码开关2为“上”和复位拨码开关1、拨码开关3和开关4。
3)如果机器人偏离了棋盘上的棋子移动后先后“居”和“泡”的立场,“帅”,机器人应该回到“起点”和移动棋子“马”的立场,“帅”,然后回到“开始“我们把拨码开关3为“上”和复位开关1、拨码开关2和开关4。
3软件设计
鉴于象棋机器人行走过程相对复杂,软件流程移动棋子的“居”到“帅”只显示在本文的位置。如图所示。
图7软件流程移动棋子的“菊”的立场,“帅”
4结果与结论
智能象棋机器人的测试是在棋盘上进行(1600times;1800毫米2),和实验数据表明,智能机器人可以实现自动线-跟踪功能,它能快速、准确地抓住棋子在行走过程中,每个棋子的移动到相应的位置。智能寻线机器人的硬件和软件设计,本文提供了一个智能寻线机器人和整个系统有一个比较好的稳定可靠的方向控制策略描述。
基于STM32的智能巡线机器人设计
摘要:本文提出了一种以增强型微控制器STM32F103RBT6为核心的智能巡线机器人,阐述了系统的巡线控制原理、硬件构造,分析了传感器的黑白标定软件设计。该系统采用两个由 4个分立元件(MOS管)构成的H桥驱动电路分别驱动左右两个电机,并且通过改变电压极性及脉冲宽度调制波(PWM) 来调整机器人的行走方向和速度,并在行走过程中运用传统PID 控制进行调节。结果表明,设计方式科学合理,机器人对场地适应性强、成本低、实用性强。
关键词:智能机器人;STM32;巡线;PWM;PID 控制
0引言
在最近的机器人竞赛和电子设计竞赛中,大部分的比赛任务,要求机器人在白色的或在外地的黑色引导线走。提出智能寻线机器人基于STM32的设计策略,其中重点控制系统线跟踪原理以及传感器电路的设计,并介绍了比例积分微分(PID)的调速系统简述。
1线跟踪系统的控制原理
任何嵌入式智能系统需要获取外界信息通过传感器。根据反馈的信息,一个微控制器用于计算与决策,并能产生控制命令和控制系统的相应的驱动器通过输出端口,完成相关的任务。用白色KT板的背景和导航路线为了弥补黑色防滑胶带的颜色是从地面的颜色有很大的不同,它是用来指导机器人的方向。我们设计了一个智能机器人,它依赖于反射式红外光电传感器ST188向前沿导航路线移动探头,并利用STM32微控制器是基于输入传感器,控制伺服电机和引导机器人的方向。
2线跟踪系统的控制原理
机器人行走的地面是白色KT板,和导航线是黑色带。我们选择反射式红外光电传感器ST188目的利用不同颜色可以吸收不同程度的光的物质。传感器的发光二极管不断发出红外线向外发射,当进入白色区域,传感器的接收管检测到的反射红外线,当它进入到黑色带区,红外吸收,和接收管几乎检测不到,任何反射红外线由于接收到的红外线的强度,输入传感器将显示不同的水平(高或低),根据输入电平的变化,微控制器可以控制的机器人,并作出决定。
3系统硬件设计
为了准确定位与线在前面和两旁的汽车传感器跟踪机器人的位置,两个直流减速电机通过改变电压来控制电机的正反转,分别实现左右车轮的主传动,并采用光电编码器测试机器人的速度。该系统的结构图如图所示。
图1系统结构
3.1为片上资源
一种高性能ARM Cortex-M3内核的32位RISC–在STM32F103RBT6采用,在ARM Cortex-M3内核的32位RISC内核具有工作频率高达72MHz。一个建立在128 kV字节高速内存,三个USART,SPI,两i2cs,四个16位定时器/计数器和两个可衡量的12位同步ADC,每个有16个外部渠道分别。每个端口可以配置成不同的模块,通过软件编程,多个I/O设有多功能双向兼容能力,和翻转速度可高达18兆赫[1]。
3.2线跟踪传感器电路设计
3.2.1布局传感器
该系统安装在七的左边部分传感器水平间距的前面,和垂直安装间距五传感器右部设置在相邻的两传感器黑色防滑胶带带宽相同的部分。水平部分上安装的传感器为奇数准确判断前中线,当汽车在黑色胶带,偏转可以根据各传感器的位置判断。左、右传感器的前部分可根据各传感器的位置来确定车辆的位置调整姿态,对智能机器人在行驶中起着关键作用。该布局保证了车辆在经过多次试验后,由于反射红外传感器,其强度与地面高度有一定关系。因此,从地面到传感器的安装距离是至关重要的。实验得到的数据如表1所示,所以我们可以知道,地面传感器的最佳高度为0.8cm。
表1不同安装高度的电流输出
|
高度(厘米) |
0.6 |
0.7 |
0.8 |
0.9 |
1.0 |
|
输出电流(毫伏) |
5.1 |
7.4 |
7.9 |
7.2 |
5.4 |
3.2.2黑–白校正
该系统采用红外反射式光电传感器ST188,这是更敏感的外部光的干扰。因此,软件设计校准黑色和白色区域。拨码开关是用来校准的黑白区域前行走的机器人,它可以减少外界干扰,增加机器人的适应对外部环境的能力。硬件校准示意图如图2所示。
图2硬件校准示意图
首先,所有的传感器在汽车点黑色导航线。拨号开关被预定义的黑标级直到发光二极管闪烁和黑色导航线的校准完成。然后所有的传感器点白色区域,和拨码开关被预定义的黑色校准级直到发光二极管闪烁和验证的白色区域完成。软件流程图如图3所示。
图3软件校准流程图
3.3驱动电路设计
该系统采用双H桥驱动电路由金属氧化物半导体(MOS)四分立元件构成的驱动电机,左、右分别。每个电机的驱动电路有三个控制端,控制端分别与电机的使能控制,电机控制,电机正反转控制。通过对电压波动和脉冲宽度调制(PWM)极性改变的值来控制行驶方向和速度的智能机器人,它可以避免由集成电机驱动芯片引起的芯片发热,实现快速启动电机,使电机转速平稳。
4速度调节系统
数字PID控制器的三种典型形式的比例、比例积分、比例积分微分调节器,比例调节器控制的强度取决于比例系数,比例系数的增大而减小稳态误差,但如果比例系数过大,它会破坏系统的动态性能,甚至导致系统不稳定[2、3],比例积分调节器的积分作用消除了比例控制残余的稳态误差,提高系统的稳定性,但它降低了系统的快速反应能力的同时[4]的比例积分微分调节器的派生诉讼共同降低了系统的超调量,克服了振荡,使系统的稳定性。数字PID控制算法分为两个类型的位置PID控制器和增量式PID控制器[5]。系统采用增量式PID控制器,与标准形式
其中K是样本个数,k=0,1,2,3,hellip;;u(k)是第k个PWM输出;Delta;u(k)是PWM的第k个输出增量;E(k)是第k个采样偏差值;T为采样时间;KP是控制器的比例增益;Ti是控制器的积分时间常数;TD为控制器的微分时间常数的增量式PID控制器原理图如图4所示。
图4增量式PID控制器原理图
模糊PID控制相比,自适应PID和专家PID算法,PID不仅能满足实际需求,但也会好,实时性能的简单方便,且易于实现,因此适合于机器人汽车比赛[6]<!-- 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146830],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

