
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
基于plc的电梯设计与实现
S.B. Ron Carter 电子电气工程系 Rajalakshmi工程学院 金奈 印度
A. Selvaraj 电子电气工程系 Rajalakshmi工程学院 金奈 印度
摘要
本文介绍了用交流电机驱动的电梯。电梯使用完全自动化的plc。它的控制基于我们从运营商以及传感器得到的输入。通过该信号plc可使驱动电机以及门电机工作。
关键词:Plc控制电梯,电梯设计,匀速电梯,plc电梯的梯形逻辑
- 引言
由于城市人口的快速增长以及多储存建筑出现的原因,电梯的需求大幅增加。如今随着人们生活水平的提高以及对人与技术发展的关注,电梯系统变得更安全、更迅速,生产的电梯质量也越来越高。以前大部分系统关注的重点在于电梯的安装,但是在上个世纪80年代以后电梯行业对电梯维修人员的需求开始增加。例如,如今自动门被用来代替飞溅门,微处理器电子卡代替继电器卡,双速电梯、速度控制电梯代替单速电梯。这类的发展使得电梯系统的质量提高,与从前相比多样化的使用设置和维护、维修工具简化了工作,提高了电梯的可靠性。一些传统系统的弊端是:
由于多次接触,复杂的布线电路,控制系统具有较高的故障率。此外,电触点容易烧坏,可能会导致接触不良。
电气控制器和基于普通法的硬件都很难实现复杂的控制功能。
电磁制动机和触点动作慢,机械和电磁惯性大,因此,系统很难精确控制。
现在已经克服的电梯缺陷有:
Plc取代了传统的继电器和集成电路,方便了电梯的控制。
利用plc我们可以监控组态软件如intouch、citech等。
使用交流电机控制电梯平稳运动,他的优点是易于控制、能够快速的加速、减速。
实现高速九相永磁同步的电机。
使用运行平稳的直线感应电机,减少机房的规模。
在缺乏定子、转子中的两个绕组的情况下,会使用线性开关磁阻电机(LSRM),但是它现在依然有一些缺陷,例如电机难控制和难以产生涟漪。
- 硬件的设计与计算
本章讨论电梯的设计,定义了某些计算电梯运行的参数。为了满足本次项目的目标,在之前已经完成了机器模型的理论研究和设计。通过对模型仿真的仿真结果进行验证和实现,确定了一些关键参数。包括客舱的大小、电梯最大承载量、钢丝绳的强度,电机用型,电机额定功率和额定转矩。本系统的重要组成部分是控制器,由于电磁制动机和触点动作慢,机械和电磁元件有很大惯性,系统很难精度控制,因此必须使用现代类型控制器,本次我们使用的是plc。通过scada监视整个系统。
2.1块图
已开发需要的模块并绘制为框图如图1,设计该模块后,计算每个模块中的组件。
图1 基于plc电梯的框图
图1描述了一个plc电梯的框图。提供了两个plc以及电机,通过接近传感器确定电梯轿厢(LDR)小屋的位置,使用门传感器(LDR)确定门的位置并控制舱内进行工作。根据设计师选择的功率转换器的类型,电机驱动系统可以有一个整流器或逆变器。
2.2 电梯轿厢的设计
电梯应可以容纳我们预想的乘客数量,并有能力承受乘电梯乘客的体重,
我们拟定电梯能承受10个约65kg的乘客。最大乘客10人,所有人的体重近似650kg,因此最大承重650kg,能够容纳10人的电梯尺寸设计为5**5*7,这里提到的尺寸指的是英尺。
为了简化设计,我们将模拟系统与实际系统比例降到1:20,在绳及其选择的张力上可以用以下简单的计算确定。承受的力可以用牛顿公式计算。
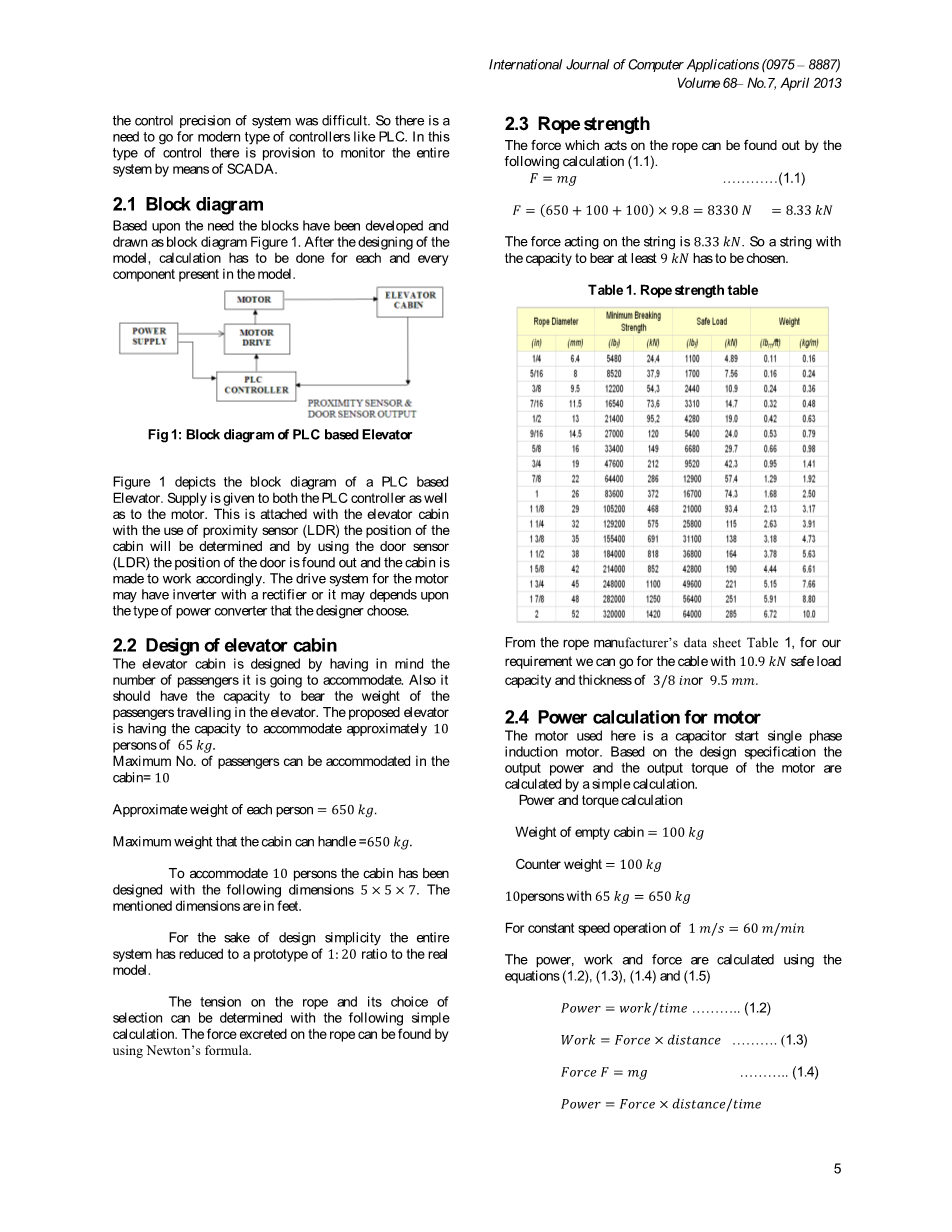
2.3钢丝绳强度
作用于绳上的力可用以下公式计算。
F=mg ....(1.1)
F=(650 100 100)*9.8=8330N=8.33kN
作用于绳上的力是8.33kN。所以要选择至少能承受9kN力的钢丝绳。
表1 钢丝绳强度表
从绳制造商的数据表表1我们可以找到安全的负载能力和厚度的电缆。10.9KN,,半径9.5mm
2.4电机功率计算
这里使用的电机是单相电容起动异步电动机,根据设计规范简单计算输出功率和电机的输出转矩。
功率和转矩计算
空仓重量=100kg
配重=100kg
10个65kg的乘客=650kg
恒速运行1m/s=60m/min
功率=工作/力
功率=力times;距离
F=mg
功率=力times;距离/时间
功率=力times;速度
电机的转矩可以用公式计算
原型比1:20
空仓5kg
配重5kg
10个人32.5kg
电梯恒速1m/s
利用方程计算功率,工作和力。
2.5齿轮计算
为了达到预期的速度1m/s,电机的输出为1500rpm,通过计算得到直径和齿轮的圆周。
舱的重量100kg
配重100kg
10个65kg的人650kg
恒速1m/s
所有光滑的齿轮具有相同的大小,因此它应该有相同的螺距p.螺距的计算公式
2.6传感器使用LDR
光敏电阻的电阻随着光的强度而变化。所以LDR是使传感器电路和LDR合为一体的潜在分压器电路中的电阻。
图2是修改后的分压器电路,添加了LDR和二极管。
输出电压的电阻R是由下列公式计算
电阻Rldr阻力穿过LDR,RIS阻力穿过R。
继电器从输出电压Vout获得的激励能量必须释放,否则继电器无法正常工作。因此使用一个二极管跨接电阻R。
2.7控制器的设计
这里使用的控制器是一个可编程逻辑控制器(PLC),它比起原有的继电式控制器有很多优点。继电器控制器有布线复杂等缺点,PLC控制器类型已经解决了这种缺陷。使用的PLC是GE FANUC VersaMax。它有16个直流输入和11路继电器输出,24V直流电源。它可以容纳多达32个I / O端口。在这个项目中要使用的端口超过了已有的端口数量。所以我们需要额外的I/O模块。根据Plc对应的传感器类型选择I/O端口,它可以是模拟或数字端口。需要为紧急情况下的安全运行提供一个单独的运行/停止手动切换模块。信号可以通过串行端口(232卢比)或以太网传输,可传输的数据量取决于我们选择的通信类型。GE FANUC VersaMax PLC具有64KB可配置的内存。
3. Versamax 1c200udr010 的布线
图3 PLC ic200udr010 的布线。从C1到C4的输入侧终端和C1至C7输出侧终端的共同点是其中任何一个终端的负载或源都必须连接。
所有plc的输入应为24伏直流电,但它将激活20伏和30伏之间的直流电。第一个输出端Q1是直流而其他输出端与继电器连接,因此可以根据我们的需求决定输出直流或交流。
4. 梯形逻辑
本章讨论了梯形逻辑网络的发展。选择了相应的PLC,开发我们要求的逻辑。这里选定versapro 2.02为开发和下载到PLC的梯形逻辑。对于不同操作的电梯逻辑的工作模式进行开发,并在下面进行讨论。
4.1从呼叫按钮获得的输入逻辑和锁存
用一个移动梯形逻辑接收来自呼叫按钮的输入信号,这就和程序得到基于输入的输出是一样的。一旦PLC接收信号那么对应的位将被锁存。
图4和表2描述了逻辑的发展,每当一层呼叫按钮获得输入时,开关相应的位会被锁存。
在plc上已被激活的相关位将被锁存,直到有另一个位释放后解除闭锁。
在获得来自呼叫按钮的输入后,该位被锁存。用于锁存呼叫按钮相应的输入信号,各位如下。
4.2逻辑对电机的运行和从地面传感器得到的信号
接收输入信号后我们要使电机能够正向或反向工作,因此我们需要进行相应的逻辑开发。
图5显示了在反向和正向运行的电机的逻辑快照。电机基于从呼叫按钮获取的PLC的输入运行。图中也交代了地面传感器的操作。通过特定的输入和相应的地面PLC可以控制电机停止。
用于电机运行输出
1)正向运动% q00001
2)反向驾驶% q00002
地面传感器:% i00007
ldr传感器的输出与PLC的输入端i00007 %与地板连接。为了减少输入计数器的数量,使用相同数量的PLC使电机停止。
4.3逻辑门
一旦电梯电机停止运作,基于从呼叫按钮的输入,地板上的传感器和PLC程序控制门的打开和关闭。逻辑必须以这种方式发展,它有利于门开放。以下是用于逻辑的输入和输出端口。
1)% q00003开门
2)开门传感器- % i00011
图6:开门梯形逻辑
图6描述了门机运行。根据逻辑,当正向和反向驾驶的电梯电机停止开门时,逻辑将被锁定并输出% q00003,在开门过程的最后传感器i00011将被锁定并停止电机开门。此操作将启动下一个关门过程。
4.4逻辑门的关闭
门关闭的过程,将传感器放置在门的末端,先将门完全打开,每当传感器信号被切断,就向plc发送关门信号。
图7:梯形逻辑门关闭
图7描述了关门操作,当开门完成,门打开操作结束,切断传感器信号。延迟定时器将被激活,这会提供门关闭前5秒钟的延迟。延迟后启动关门操作。最后关门完成后传感器会发出一个信号给PLC。
各种输入和输出使用,
1)% q00004关门
2)门关闭传感器- % i00012
4.5火灾传感器逻辑
作为一种安全措施,图8中描述了安装在电梯轿厢的火灾传感器逻辑
图8:火灾传感器的梯形逻辑
输入%1 i00015用于火灾探测传感器的输入端。一旦输入被激活,为了阻止电梯在最近的楼层停靠,PLC将启动反向驾驶。
5. 结论
因此,本文介绍了整个电路图和梯形逻辑的发展。梯形逻辑用versapro 2.02开发实现。输入和输出的正向和反向的电梯,在每层楼都有包含逻辑和程序解释的传感器和门开关电机运行。
基于plc的电梯控制系统的实现
Sandar Htay ,Su Su Yi Mon 电子工程系,曼德勒科技大学(MTU),缅甸
摘要
本文介绍了plc电梯控制系统。在自动应用电子控制模块中电梯是一个重点。现在缅甸是一个发展中国家,缅甸在发展中高层建筑也越来越多。本文重点介绍用plc对电路进行控制,并建立电梯模型。电梯使用霍尔效应传感器。用直流电动机来控制电梯轿厢的升降运动。用按钮来呼叫电梯轿厢。通过使用显示单元了解电梯的位置。在本文中,使用自动站软件梯形逻辑程序构建四楼层控制系统。
关键词:wplc,电梯设计、霍尔传感器、直流电机、梯形逻辑
1.引言
对于大多数居住在城市的市民,电梯已经成为他们日常生活中不可或缺的一部分。简单地说,电梯是一种升降装置,用于运载乘客或货物,并配有控制平台,通常在固定轨道上移动,并提供2个或更多的停靠站。液压电梯和牵引电梯是现今主要的两类电梯。基于楼层数、高度、运载人数、所需的乘客等待时间和使用频率的考虑来选择电动牵引驱动或液压系统。本次项目是设计和建造一个plc电梯,并通过霍尔效应传感器了解电梯位置,液压电梯和牵引电梯是现今在多层次结构中普遍存在的两类电梯。
2.工作结构
在[9]中,作者介绍了一种用plc的小规模电梯模型,控制器的设计基于GE Fanuc versamaxplc梯子逻辑语言,利用versapro实现。2.02.in控制设计技术,使用光敏电阻(LDR)确定电梯楼层.ge Fanuc VersaMax PLC具有一个64kbyte可配置的内存。为提高电梯系统的质量,提高使用环境和可靠性。作者还提到实现高速九相永磁同步的电机控制系统。在[10]中,作者提到了无线模块的实现,实现了用户信息的传输,采用plc控制系统,plc与无线模块之间通过adopted.si4432收发器串行通信,单片机和PLC用来修改施工电梯控制系统。系统由plc、无线呼叫装置和无线主机收发器组成。电梯控制系统可以根据呼叫信息确定下一个行驶方向,系统变为自动操作,实现无人操作。
在[11]中,作者描述了应用程序的状态图建模,电梯系统的设计与实现,其系统行为涉及到状态描述的聚合复杂度,并实施基本的控制策略。根据电梯的运行流程,他们得出相关的状态图模型。通过对电梯固有
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152596],资料为PDF文档或Word文档,PDF文档可免费转换为Word

