英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
摘 要
船舶监控系统(VMS)为量化渔业研究提供了新的契机。基于渔船的类型,文章提出了许多利用VMS轨迹识别渔业活动的方法。然而,有一个研究问题仍然需要解决,那就是如何仅根据VMS轨迹来识别渔船的类型。这个问题很重要,因为它要求渔船类型作为从VMS轨迹识别捕鱼活动的一个初步依据。本文提出了一种基于VMS轨迹的渔船类型识别方案。FVID以XGBoost的特征工程和机器学习方案为两个关键模块,将渔船分为九类。该数据集包含2017年3月在东海的所有渔船轨迹,包括10031艘预先登记的渔船和1350艘未知类型的未登记的渔船。为了验证类型识别的准确性,我们首先对注册渔船的轨迹进行4次交叉验证。分类准确率为95.42%。然后,我们将FVID应用于未注册的渔船,以识别它们的类型。在对未登记的渔船类别进行分类后,会根据其类别进一步确认其捕鱼活动。最后,我们计算并比较了未注册渔船使用前后东海的捕捞密度分布,确认了未注册渔船类型识别的重要性。
关键词:VMS;船舶类型识别;捕鱼密度;轨迹分析;分类。
1.介绍
船舶监控系统(VMS)的最初目标是加强航行安全。它记录船舶航行信息,包括其身份、时间、位置、瞬时速度和航向等。当在渔船上部署卫星设备时,VMS会产生大量的轨迹数据。同时,随着轨迹数据处理的改进,这些VMS数据为量化渔业研究提供了新的机遇。
以往关于VMS轨迹的垂钓研究分为两个阶段。首先是识别所有VMS轨迹的捕鱼片区。在这一步中利用了不同的分类方法,包括速度和航向的阈值,统计推断,机器学习和图像处理。第二种是计算捕捞相关的指标,包括捕捞密度和捕捞力度。
以往的研究多以对渔船类型的认识为基础,因为渔船类型识别要求渔船类型适用不同的航速、航向等条件。然而,渔船的类型在实践中往往是未知的,因为并非所有的渔船都已向与某一渔区有关的渔政局登记。例如,2017年3月,浙江省海洋渔业局在其监控下,记录了10031艘在东海活动的渔船。与此同时,在同一地区出现了1350艘未注册的渔船,这就要求在进一步分析捕捞密度或捕捞力度等指标之前,必须先确定它们的类型。因此,本文的研究问题是如何基于VMS轨迹识别渔船类型。Campanis和Coro等人提出的方案试图计算未注册渔船的捕捞活动。这些方案直接利用速度、方向和水深信息来建立基于规则的分类器,这对于不同类型的渔船来说是容易出错的。
在船舶类型识别问题上存在两大挑战。首先,不同类型的渔船往往吨位和发动机相似,因此它们的航行和捕鱼活动可能相差不大。其次,VMS轨迹数据量大,需要一种有效的计算方法。在本文中,我们提出了一种仅基于VMS轨迹的渔船类型识别方案FVID。FVID利用XG Boost的特征工程和机器学习方案作为其两个关键块。FVID首先利用特征工程从VMS轨迹中提取特征,代表不同渔船类型之间的差异。由于一个特征向量表示了一艘渔船的轨迹特征,因此减小了下一航段的输入尺寸。XGBoost分类器利用训练阶段注册渔船的特征向量,识别出未注册渔船的类型。为了解决不同类型渔船数量之间的不平衡,我们在分类前进一步采用了SMOTE过度抽样法。
VMS数据集由浙江省海洋渔业局于2017年3月记录,共包含49236165和13.6 GB内存的记录数据。特别是,每艘船平均有4326条记录,最多12051条,最少2032条。此外,这些轨迹是由中国北斗卫星系统记录的,5分钟的分辨率。本地区登记注册的渔船有虾拖网、网板拖网、对拖网、刺网、帆布堆网、蟹笼、方网、轻型围网和运输等9种类型。因此,渔船识别的任务是将未登记的渔船归入这九种类型之一。
为了验证分类的准确性,我们首先利用注册渔船的轨迹对FVID进行4次交叉验证。分类精度为95.42%,验证了FVID的性能。然后对未登记的渔船进行FVID分类。未经注册的渔船被确定其类型后,我们确认其捕鱼活动。最后,利用注册渔船和未注册渔船的轨迹,计算渔船密度分布的变化,以确认未注册渔船类型识别的重要性。
2.数据集和方法
本节首先简要介绍在实践中带来了渔船类型识别的问题的VMS数据集。然后详细介绍了所提出的渔船类型识别方案FVID。
2.1 数据集
该数据集是由中国浙江省海洋与渔业局记录的活动渔船的VMS轨迹。轨迹数据包含201年3月东海渔船的时间、位置、航行速度和方向等。记录的轨迹具有5分钟的时间分辨率,数据集有49236165条记录。本月有10031艘注册“渔船”活动。此外,该数据集包含了1350艘未注册渔船的轨迹。
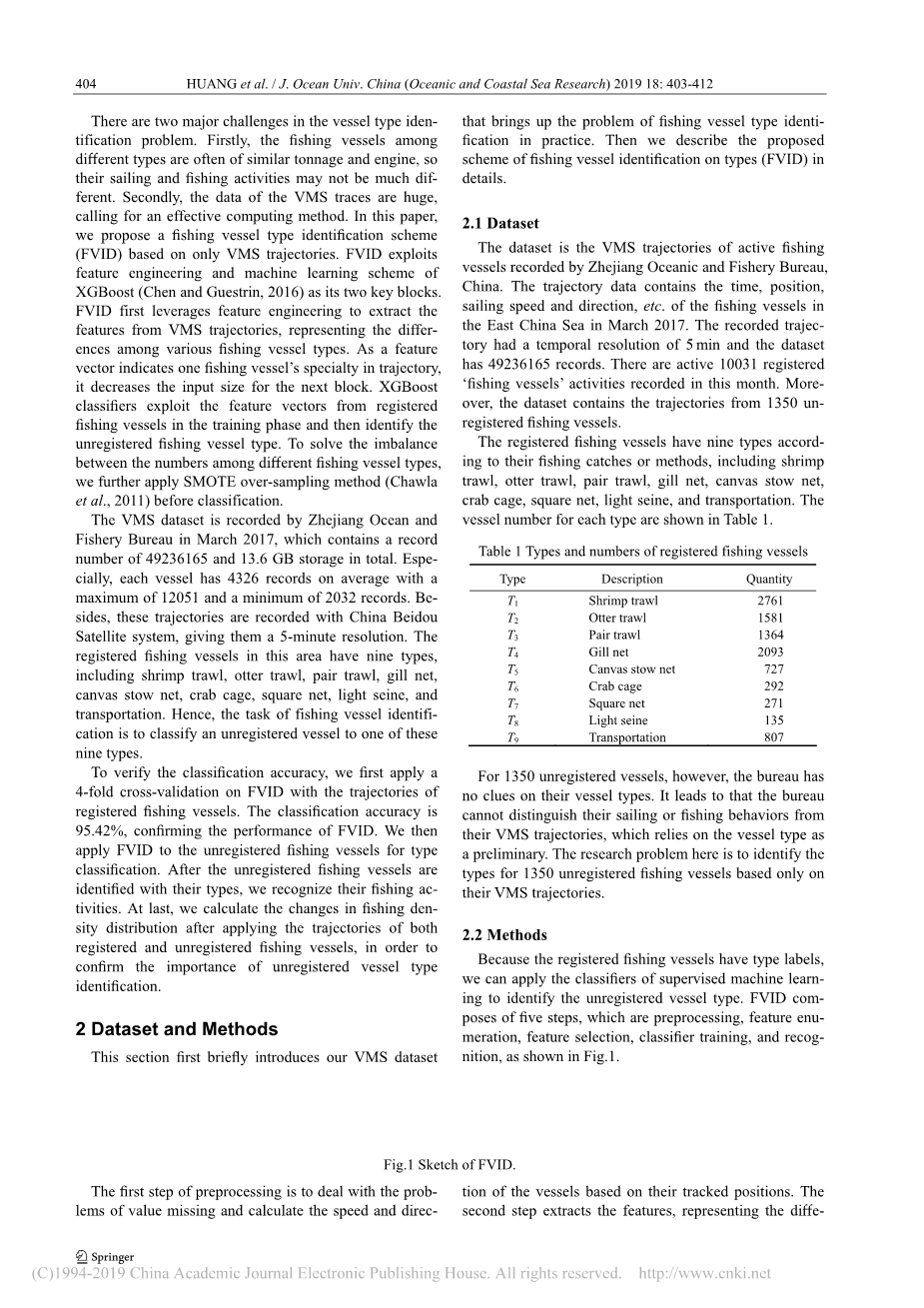
注册渔船按其捕捞量或捕捞方式分为虾网渔船、网板拖网渔船、对拖网渔船、刺网渔船、帆布堆网渔船、蟹笼渔船、方网渔船、轻型围网渔船和运输渔船等9种。每种型号船号如表2.1所示。
表2.1注册渔船的种类和数量
然而,对于1350艘未登记的船只,该局没有关于其船只类型的线索。这导致该局无法区分他们的航行或捕鱼行为和他们的VMS轨迹,而VMS轨迹依赖于船只类型作为初步判断。这里的研究问题是仅根据VMS轨迹来识别1350艘未注册渔船的类型。
2.2 方法
由于注册渔船有类型标签,我们可以使用监督机器学习的分类器来识别未注册的渔船类型。FVID 由预处理、特征枚举、特征选择、分类器训练和类型识别五个步骤组成,如图2.1所示。
图2.1 FVID的示意图
预处理的第一步是基于所捕捉的位置处理缺失值问题,计算船舶速度和航向。
第二步提取特征,表示在不同类型的渔船之间的轨迹差异。我们从轨迹分析中提取时间、速度、方向和区域的特征,并应用特征选择找到最佳特征向量进行分类。FVID利用了XGBoost分类器的准确性和轻量级成本。如表1所示,不同捕捞类型的分布是不平衡的。我们对那些数量少的船舶类型采用过度采样方法。对分类器进行训练后,利用分类器识别未注册渔船的类型。我们将在下面详细说明我们的方法的每个步骤。
1)预处理:由于传输错误和数据丢失非常普遍。一旦GPS时间、纬度或经度项上有一个空值,我们就删除记录。同时,记录的速度和方向是北斗终端设备观测到的瞬时值,这个瞬时值由于船舶的晃动和波浪,会出现较大的波动。我们计算了两个记录之间的平均方向和速度,这比瞬时记录更稳定。
2)特征枚举:本节描述特征枚举阶段。这里列举了61个特征表示不同渔船类型之间的差异。
对于每个VMS记录,我们选择时间、经度、纬度、方向和速度作为预处理后特性计数的原始字段。之前的研究指出,对于许多类型的渔船来说,捕捞活动的速度与航行速度是不同的。因此,我们计算数据集中的每种注册船只的速度分布。
图2.2为所有9种类型渔船的速度分布。所有类型渔船的整个航速段从0到12。对于不同类型的渔船,速度分布的密集区域存在一定的差异。例如,无论是捕虾拖网还是网板拖网的速度分布都只有一个(2.5,5.5)的清晰致密段,而刺网有两个(0.5,2.5)和(5.5,12)的致密段。在对每一种类的致密切片进行计数时,在图2.2中发现了三条分裂线,分别是0.5、2.5和5.5。根据这些线条,整个speed部分被划分为(0,0.5)、(0.5,2.5)、(2.5,5.5)和(5.5,12)四个部分。
图2.2 九种渔船的航速分布
根据这四种速度分布,九种类型的渔船有相似或不同的分布。这提供了将九种类型至少分成四组的线索。第一个只包含一种类型刺网渔船,有两个密集的部分(0.5,2.5)和(5.5,12)。第二个只有两个密集的螃蟹笼子,分别是(2.5,5.5)和(5.5,12)。第三种是两种类型的渔船,即帆布积网渔船和运输渔船。它们密集的部分在于速度(5.5,12)。最后一组共有五种类型,包括捕虾拖网渔船、网板拖网渔船、对拖网渔船、方网渔船和轻型围网渔船。如图2.2所示,这五种类型的分布在(2.5、5.5)中只有一个典型的致密断面。这四组数据表明,以四个速度区段的分布为特征进行分类是有帮助的。因此,我们将前四个特征量化为每条船速度值的四个速度部分的直方图。
当进一步比较最后一组内不同类型的分布时,图2.2所示的速度(2.5、5.5)的密度分布仍有一定差异。
图2.3 各类渔船捕捞活动的空间频率分布
方向场在渔船捕鱼时存在变化。这是因为不同类型的渔船采用不同的捕鱼方法。例如,网板拖网渔船拖着他们的网频繁转弯来抓鱼。这些类型的活动带来了快速改变方向。相反,刺网渔船在一个地方放下网,航行离开,然后回来把网拉出来。因此,它们唯一典型的捕鱼轨迹是沿着一条路径来回航行,只有一个转弯。除了唯一的转弯,没有明显的方向变化。
因此,我们使用速度区间(0,0.5)、(0.5,2.5)和(2.5,5.5)的方向标准差作为特征f26-f28。
不同类型渔船的捕捞周期也有一定的差异。尤其对于灯光网渔船,他们的捕鱼活动发生在第二天的下午4点到第二天早上6点,这段时间天空是黑暗的。我们设计了一些特征值来获取速度区间(2.5, 5.5)在每个小时所占的比例, 作为f29-f52。速度区间(2.5、5.5)是典型的轻型围网、捕虾拖网、网板拖网、对拖网和方网的密集段。例如,f29代表了一艘船在0:00到1:00在速度区间(2.5, 5.5)中所占的捕鱼记录的比例。我们也定义了 f53-f61分别为时间段 (0:00-5:00), (5:00-7:00), (5:00-8:00), (6:00-11:00), (6:00-17:00), (12:00,14:00), (12:00,17:00), (18:00-23:00) 和 (18:00-5:00)的捕鱼记录。
总结所有的特性,我们从原始VMS数据中提取了61个特征值。所有这些特征值分别与速度区段(0,0.5)、(0.5,2.5)、(2.5,5.5)和(5.5,12)有关。f1-f4表示(0,0.5)、(0.5,2.5)、(2.5,5.5)和(5.5,12)速度区间的直方图。f5-f13在速度区段(0,0.5)、(0.5、2.5)和(2.5、5.5)上标记平均值、中值和标准差。经纬度上的均值、中位数分别构成(0,0.5)、(0.5、2.5)、(2.5、5.5)速度区间的空间特征值f14-f25。f26-f28分别表示(0,0.5),(0.5,2.5)和(2.5,5.5)速度区间上方向的标准差。时间特征值f29-f52计算每小时占用的速度部分的比例。
特征值f53-f61作为某些特殊时期的捕鱼比例。
3)分类器和过度采样:由于特征选择方法属于包装类,所以我们在这一小节中对分类器进行说明,然后在下一小节中描述我们的特征选择。根据已知类型注册渔船的VMS轨迹,可以将未注册渔船类型识别问题定义为监督多类分类问题。由于我们的数据量很大,因此选择一个能够并行执行的分类器是很重要的。因此,我们选择XGBoost (Chen and Guestrin, 2016)作为分类器。此外, 取 One-Versus-Rest (OVR) (Boutell等人, 2004 ) 多层次分类问题的方法 即训练9个分类器用于类型 T1-T9。对于未注册的容器,每个分类器生成实例属于相应类型的概率。然后将实例标识为具有最大概率的类型。通过交叉验证调整XGBoost的超参数。
如表2.1所示,T6型、T7型和T8型的渔船数量与其他类型的渔船数量相比都很小。67 8 这导致了训练样本在类型间的不平衡。我们使用了Synthetic Minority Over-sampling Technique (SMOTE)来解决这个问题。SMOTE是一种利用过采样技术处理少数和合成新样本的过程。
应用SMOTE,对T6、T7和T8型分别对9739、9760和9896个阳性样品进行过采样。我们将在评估部分比较过采样前后的分类精度。
-
特征选择:在前面的特征枚举中,我们构造了速度、方向、空间和时间特征值。共有61个特征值。然而,并非所有的特征值都有助于分类;也许一些特征值相互矛盾或对分类器的贡献很小(Feng and Lang,2017)。我们应用特征值选择来评估每个特征值对分类的贡献,并为每种船舶类型分类器找到最佳的特征向量。首先,我们通过方差阈值法去降低方差特
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237034],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 船舶在浅水航道中航行时的岸壁效应数值研究外文翻译资料
- 基于三维面元法限制水域船体下蹲的数值研究外文翻译资料
- 关于甲板大开口船体梁极限抗扭强度的实验研究外文翻译资料
- 基于斯托克斯方程计算和系统识别 方法预估实船操纵模型参数外文翻译资料
- 水面舰艇5415在PMM演习中的基准CFD验 证数据-第二部分:平均相位的立体PIV流 场测量外文翻译资料
- 初步设计阶段船舶功率推进预测第二部分初步设计中有用的服务速度船舶功率推进数学模型外文翻译资料
- 对某高速船模湍流自由表面的数值与试验研究外文翻译资料
- 第三章水下搜救与恢复操作外文翻译资料
- 液化天然气供求关系的现状与展望:一个全球性展望外文翻译资料
- 基于CFD的高层钢结构建筑风效应数值评估外文翻译资料

