英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
相干海洋雷达观测小尺度流和海浪方向谱
Dennis B Trizna
摘要:具有6米分辨率的相参海洋雷达已经研发出来,被用于测量海浪的轨道波速度的径向分量以及平均径向海洋表面速度。这个装置以0.4Hz图像速率收集一系列相干雷达图像,再对这些图像做3D-FFT处理来直接测量海浪谱。通常,相参海洋雷达使用256个图像,覆盖周期约10分钟,可以测量适度数量的波群。通过收集的所有径向速度图像的叠加获得平均径向速度图,将波浪图与平均径向速度图混合,从而产生区域平均流场的图。在沿海地区运行的一对雷达,沿着海岸线分隔了几百米,测得的不同径向分量的组合形成平均海流矢量场。雷达的首次测试在美国海军实验场进行。
1、引言
海洋雷达提供沿海波场的快照序列,可用一些图像处理算法进行处理。许多研究人员已经建立了使用雷达和光学视频图像序列的实用机制,并且从这些数据中获得有用的沿海海洋信息。我们最近开发了一个集成的雷达和数据采集软件包使这种测量系统可以无人值守。原型系统已在美国陆军工程兵团(FRF)建成,并在DuckNC进行广泛的测试和地面实测对比。实时结果可以在FRF网站查看。在生成行波的图像时,相干海洋雷达的处理与非相干的非常相似。标准海洋雷达的图像是后向散射强度。对于相干海洋雷达,图像是轨道波速度的径向分量,这也将呈现行波的排列。由于这两种情况下的处理是相似的,我们首先给出标准的海洋雷达的一般方法。
2、微波雷达
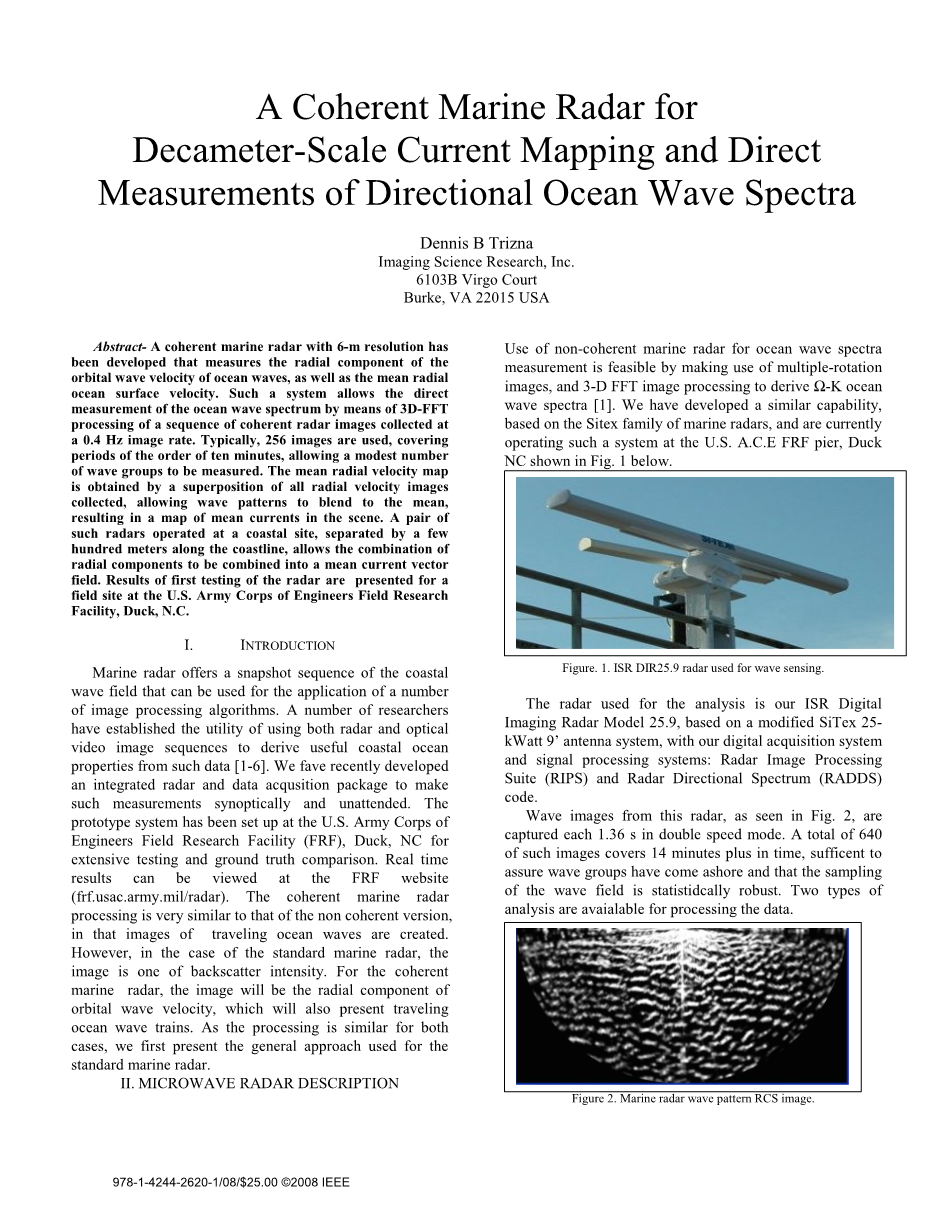
非相干雷达测量海浪谱是利用多个旋转图像,对图像序列作三维傅里叶变换获得频率波数谱()。基于Sitex系列海洋雷达,我们已经具有了一个类似的能力,目前该系统正在美国A.C.EFRF码头运行,位于DuckNC,如图1所示。
图1用于波浪遥感的ISRDIR25.9雷达
我们用于分析的雷达是使用的是ISR数字成像雷达模块25.9,是基于改进一个25千瓦、9英尺天线的SiTex雷达系统,加入我们的数字采集系统和信号处理系统,包括雷达图像处理套件(RIP)和雷达方向谱(雷声自动化数字设计系统)的代码。
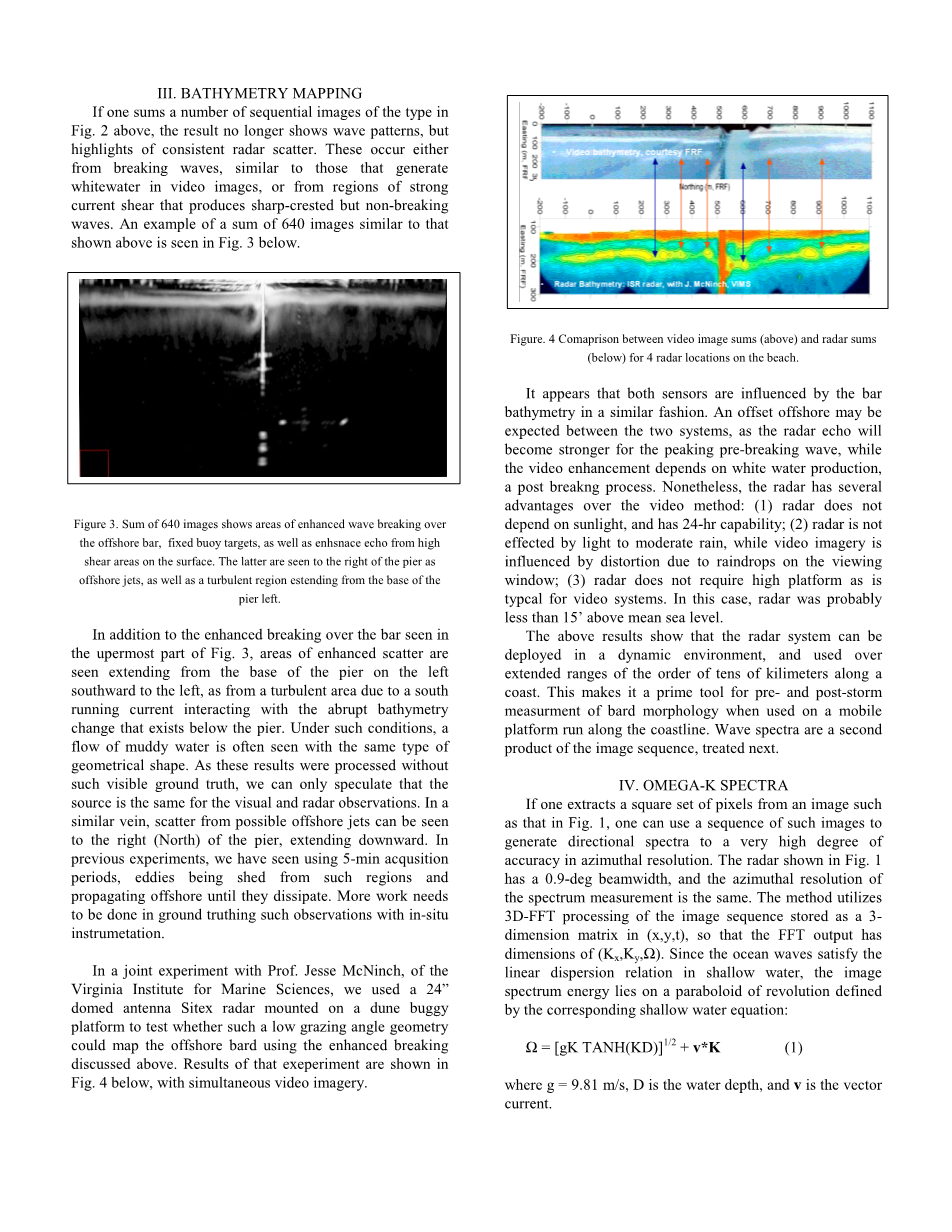
这个雷达的图像如图2所示,是由雷达在双速模式下1.36秒捕获的。在14分钟的时间里共有640个这样的图像,充分保证波场采样的统计稳定性。可以用两种方法处理这种数据。
图2海洋雷达观测的波面图像
3、水深测绘
如果对图2中的一个图像序列求和,结果将不再显示波浪的波形,而是一致的雷达散射亮点。它们是由破碎的波狼(类似于视频图像里的湍流)、或是从强流剪切产生尖口但波浪不破碎的区域产生的。对640幅图像求和的一个例子如图3所示。
图3 对640幅图像求和的图像。图中增强显示了沿岸的波浪破碎,海表固定浮标目标,以及高剪切区域。后者在码头右侧,就像离岸急流,像湍流区域一样扩展到码头的左侧。
除了在图3最高的部分看到增强的破碎波浪外,增强散射区域是从左边的码头向南延伸,这和湍流区域有关,是由于向南的流动到码头下方时水深急剧变化造成的。在这样的条件下,经常会看到浑水流动和几何形状类似。由于这些结果没有可见的现场实测数据,我们只能推测看到的是和雷达观测得到的结果是一样的。以类似的逻辑,我们可以看到离岸流的散射在码头的右侧(北)并向下延伸。在以前的实验中,我们使用的是5分钟采集周期,涡从这些区域脱落,并在近岸传播直到它们消失。但是地面实况调查与现场观察还需要更多的工作。
在与JesseMcNinch教授(弗吉尼亚海洋科学研究所)联合实验中,我们使用了一个24英寸圆顶天线Sitex雷达安装在一个车平台上,测试这样一个低掠射角是否可以用于观测近岸的海洋。这个实验的结果如图4所示,还有同时间的视频图像。
图4海滩上4个雷达地点的视频图像之和(上图)和雷达图像之和(下图)的比较
图4表明这两种传感器受水深影响的方式相似。这两个系统之间预计会有离岸补偿,雷达回波因为破碎波剧增而加强,而视频图像增强取决于湍流的产生,这是一个后期的过程。尽管如此,相比录像,雷达有几个优点:(1)雷达不依赖于阳光,有24小时监视的能力;(2)雷达不受小到中雨的影响,而视频图像会由于雨滴在取景器上而变形;(3)雷达并不需要放置在很高的平台上,但是录像需要。在这种情况下,雷达可以安装在距离海平面低于15英尺的高度。
以上结果表明,雷达系统可以部署在一个动态的环境里,并对沿海的覆盖范围可以达到10千米的量级。这使得它在前期和后期风暴测量地形形态时,成为在沿海运行的移动平台上的首要使用工具。海浪谱是图像序列的第二个产品。
4.1、频率波数谱
如果从图像中选取一个矩形区域(如图1),可以使用这样的图像序列来产生方向谱,而且在方位分辨率有非常高的精度。图1所示的雷达波束宽度是0.9度,波浪谱的方位角分辨率是和它相同的。该方法利用3D-FFT处理图像序列,将其存储为一个3维矩阵(X,Y,T),傅里叶变换后的输出是频域(KX,Ky,Omega;)。由于海浪在浅水中满足线性色散关系,所以图像的谱能量取决于相应的浅水方程所定义的频散关系:
(其中g=9.81米/秒,D是水的深度,v是海流的流速矢量。)
在图4a和图4b中分别显示了相应的浅水和v=0时的三维频散关系曲面。
图4a深水方程的频散关系曲面,其中TANH项的值为1
图4b同上图,但是流速非0的情况
由于FFT过程中产生离散频率和波数的步长,使得光谱能量发生离散,显示波数频率谱最简单的方法是:一系列的Kx-Ky谱,每个频率Omega;一个谱。对于一个64x64像素和2.72-sec旋转周期的64幅图像组成的时间序列,无模糊频率范围为0.367Hz,分辨率为0.0115Hz。典型的数据集合使用320个幅图像,覆盖时长为14.51分钟,足以采集足够数量的波来保证统计的有效性,并估计海浪谱。32个波浪谱中的两个例子如图5所示,其中的圆圈分别是深水和3.8米深度、流速为0时的频散关系。
4.2、海浪方向谱
64幅图像的3D-FFT处理结果生成32个正频率的波数谱,和32个负频率谱(负频率是冗余的)。图5显示了2个谱。红色区域对应谱峰的波数和方向。动态范围超过图像强度的60分贝。需要注意的是,随着频率的增大,海底对波浪的影响减小,深水和浅水的能量分布彼此接近。峰值的偏移量是由于表层流对谱峰的影响造成的。
图5 32个频率中的2个波数谱;圆表示深(红色)和浅水(白色)色散关系。白色圆圈的偏移是由于海表流引起的
通过对32个频谱求和,可以得到一个波浪谱,可以建立一个14分钟的频谱。得到的频率谱可以与实测的海浪相比较,例如浮标测量的波浪谱。
图6a北卡罗来纳州离岸三英里的Wave-Ride浮标测量的波浪频谱时间序列
图6b 海洋雷达观测的水深8米海区的波浪谱,与浮标测量的频率谱显示出类似的变化
与离岸5公里的海浪观测浮标进行比较的初步结果,如图6a和b所示,图上表明在2005年5月发生了一场波高4.5米的风暴。缩放比例的变更需要依据频率依赖性(由经验确定),这个比例被称为调制传递函数(MTF),一旦确定,可以用雷达图像谱来测量海浪波数谱。这个调制传递函数可能对掠入射角的依赖性较小,即给定现场的雷达高度,科研人员正在研究这种依赖性。
5.1、雷达调制传递函数的测定
确定该调制传递函数的实验结果如下图7所示。我们绘制了32个频率的雷达回波功率与海浪波能变化的散点图(m2/Hz)。数据按3米/秒风速的步长排序,以了解区间的异常值。通过分析黑色和红色符号数据,可以看出对于低于6m/s或12kts的风,典型的水平极化商用海洋雷达不能准确的进行海浪测量。对于绿色符号,也有一些异常点。
图7 雷达回波功率与海浪波能变化的散点图。黑线表示拟合的雷达调制传递函数,其中的异常点如文中所述
我们考虑了在FRF测量的风速的时间序列,发现图像中绿色高异常值数据以及绿色低值发生在风向变化的时期。绿色高风速期间有一个大气锋面通过,在这段时间内风从近岸吹向海洋。这种情况在开阔海域是不常见的,因为波场通常在相当短的时间内响应风的变化。然而,对于沿海波浪来说并不是这样,必须知道风向,从而确保在雷达图像中获得高质量的海浪谱。
提升我们实时海浪测量能力的下一步是将调制传递函数应用于雷达时间序列,确定相应的雷达反演的海浪方向谱,并实时显示结果。
5.2、相干雷达的设计
通过对非相干标准海洋雷达数据分析方法的理解,我们现在讨论一下相干雷达系统的设计和分析。如果基座中的所有SiTex组件都被相干雷达组件替代(除了通过SMA到波导连接到天线的最终接口,包括现有的信号限制器),其平台和图1的一样。旋转电机的旋转周期为2.5秒和5秒,而标准海洋雷达的周期为1.25秒和2.5秒。雷达以较慢的速度运行,以允许每个波束宽度步长内有更多的脉冲用于观测海洋表面,每个脉冲宽度内可以允许估计几个脉冲对的速度估计。非相干SiTex雷达发射功率范围为4至25KW峰值功率,脉冲宽度为60ns或9m。
对于典型的脉冲重复频率(PRF)2KHz(500mu;s周期),传输时间仅占脉冲的0.012%,因此传输的平均功率范围在0.48至3瓦特之间。用于简单脉冲操作的相干雷达源也具有这些参数,其常在价格在40,00到10,000美元之间,使得这种硬件对于遥感雷达是无用的。相反,我们使用5-10瓦峰值功率的低功率固态放大器,并使用类似于用于合成孔径雷达的脉冲压缩方法。雷达噪声的带宽决定了最终的压缩脉冲长度,对于5米的脉冲长度来说是30MHz。所获得的功率压缩增益是传输的扩展脉冲长度的时间的比率除以最终压缩脉冲长度,在此期间使用线性调频脉冲。因此,在30MHz(5m)采样的1mu;s脉冲(150m)传输传输功率,可以获得30或者900的脉冲压缩增益,或29.5分贝的功率压缩增益。因此,10瓦的线性放大器产生9KW的等效压缩脉冲。每增加一倍的调频脉冲长度,就会得到6倍的增益。
啁啾脉冲的方法是基于我们的ISR雷达收发器卡。可对脉冲波形进行编程,允许线性啁啾、巴克码和用户定义的相位编码信号。对于典型应用,可使用20-50MHz频率,带宽为30MHz的线性啁啾,该信号与9400MHz的锁相振荡器(PLO)源混合,锁定到收发器的信号为20MHz。这种锁定保证了脉冲到脉冲的一致性,以及获取与发射脉冲的一致性。然后将混合的中频输出反馈到功率放大器,产生一个用于传输的10瓦峰值功率啁啾脉冲。
以类似的方式,接收到的信号由低噪声放大器在微波频率下放大,然后将刚才的参考信号进行混频。所得到的20-50MHz信号以100MHzA/D的采样率进行数字化,用于存储和处理。该处理包括两个步骤:(1)脉冲压缩,以50MHz速率输出实数和虚数样本;(2)用多普勒处理或脉冲对相位差分来估计径向速度。在本文中,我们提供一些我们开发的系统在第一次现场试验中收集的海洋回波的多普勒处理结果。
6、相参多普勒谱
如图8所示,多普勒频谱使用128像素点的傅里叶变换,对于400 Hz的脉冲重复频率,相干积分时间是0.32 秒。零多普勒直流回波已被滤波,正多普勒频移对应地接近目标。
图8 一幅X波段相干雷达的多普勒频谱,显示出间距75米的前进波列,在250米处的浅水效应
由于发生在海滩陡峭处,短距离的脉冲会与负多普勒谱混叠。多普勒频移200Hz表示径向速度为3.2m/s。在范围内进一步查看四个或更多其他波峰,都具有不同的偏移,以及相对应的径向轨道波速度和波高。由于浅水波的破碎很混乱,所以会发生最短距离的较高偏移。范围扩大是由于波浪破裂而导致的增大的粗糙度。这样的图像的序列显示出的峰值多普勒频移随着每个波浪接近岸边而增加。
这些数据是用安装在货车顶部的雷达收集的,所以会有波谷的阴影出现。此外,这一天波场也相对较弱,波浪平缓向岸传播。在以后的计划里,使用较高的基座平台,可以观测到完整的波浪。随着适度的风使海表面变粗糙,多普勒谱在范围和频率上应该按正弦曲线变化,与在这里所观察到的峰值回波相比,波谷回波区域相等但有相反的位移。
7、波高和海流
将前面讨论过的类似分析方法应用于相干雷达数据,但是我们使用代表径向轨道波速度分量的多普勒频移来代替雷达后向散射强度。图8的数据是由雷达在不旋转的情况下收集的。在旋转模式下,必须使用较短的FFT积分周期(已成功使用64个样本)。或者,对于每个范围的样本,可以使用连续的I、Q分量对的相位差来确定每个像素处的速度偏移。关于信噪比是否以弱回波(例如波谷)在整个波上使用脉冲对相位差法进行测量的问题仍然存在。应该注意的是,图5所示的波数谱是在有显著波浪阴影的条件下计算的,使得径向回波不是正弦形状,而是更像一个剪切的波列。在这种情况下,波数谱边带不是很重要的,所以来自整个波束的强相干回波可能不需要获得类似的结果。然后可以直接从轨道波谱中获取波高频谱,而不需要调制传递函数。这种非相干和相干海洋雷达方法的比较与沿轨干涉SAR测量相比,是与从合成孔径雷达(SAR)反演波高的方法一致。在前一种情况下,需要调制传递函数,而在后一种情况下,波高的测量直接来自轨道波径向分量测量。对于海洋雷达,最强信号总是在迎面而来的波浪方向发生,使得回波强度和径向速度同时最大化。在SAR的情况下,必须通过SAR飞行轨迹相对于波浪方向的知识来估计径向速度最大值。
接下来估计一个多普勒频移,例如多普勒频谱中的峰值,用于每个像素范围-方位角。极坐标结果中的范围-方位图,与标准海洋雷达的强度回波非常相似。然后将多普勒范围方位像素转换为笛卡尔坐标,以产生类似的三维多普勒量级的xy图,类似于上面的图2(其中回波强度为z坐标)。以相似的方式,将这种笛卡尔多普勒图像的序列相加以产生类似于图3。波列相加后求平均值,任何偏移表示海表的平均径向流。使用这种
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26588],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

