
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
有关船舶领域的统计研究
Elisabeth M. Goodwin(伦敦理工学院)
船舶领域可能被认为是相对于其他船舶和固定设施,航行者在其船舶周围想要保持自由的水域范围。在1975年2月12日的学院会议上,会议主席Captain R. Mayboum 朗读了本篇文章,Mrs. Goodwin 说明了决定船舶领域维度的研究取决于在北海的雷达模拟器的性能和交通调查。她同时也建议将这个船舶领域的概念应用到海上交通工程和交通控制方案中。
- 介绍。
近年来人们对海洋越来越感兴趣,海洋是人们与世界交流的一种手段,同时也是一个食物与矿物质的来源。
所有这一切都有助于增加海洋运输的问题。据预测,在1969年的船舶基数上,到1980年时,船舶总数将增加40%。加之预期的海上交通量的增加,目前的趋势是建造更大和更快的船。在1963年,只有0.1%的船舶超过40000注册吨,到1973年,比例达到了2%,最大的船舶达到甚至超过了140000注册吨。这些更大的船需要更深的吃水所以尤其是在较浅的水域如北海,通航空间更少。
如果不采取行动,根据这些趋势不难想象可能的后果。目前每年严重的海上交通事故的数量很小,但是情节轻微的伤亡率很高。1973的数据显示一艘500注册吨或者更重的船舶有将近20%的可能性会在一年内在某种程度上会遭受到轻微的损毁。结果是丢掉性命的情况比较少但是许多轻微的伤亡事故却对环境造成了破坏,这个问题正受到越来越多的关注,也变得越来越重要。随着大量的石油和化学品以单独的单位进行运送,如果要阻止累积到最后灾难性的污染,降低目前的事故率是必要的。
因此普遍的要求是要更有效的使用可用的水域。这导致了近些年来一个全新的研究领域的发展—海上交通工程,使得这个问题的科学解决方法得以科学化。日本研究者在这个学科方面是先锋,但是现在许多国家也在各种海上交通问题上做了大量的工作。
- 船舶领域。
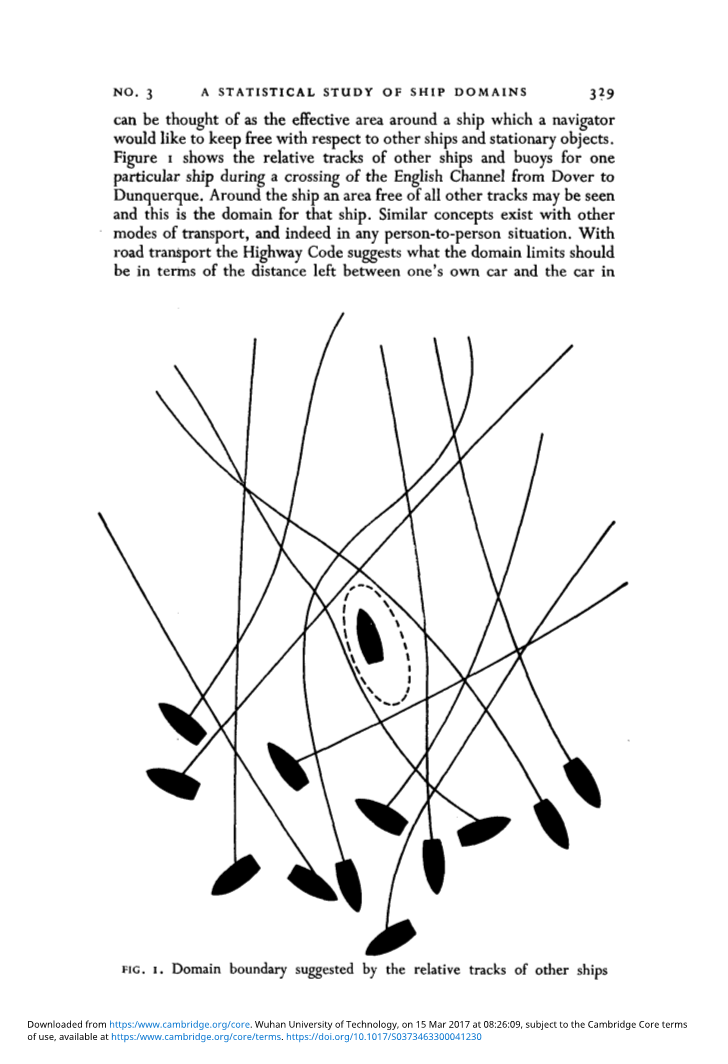
这篇文章关注的特定方面是建立任何一艘船舶所需要的安全航行水域。这里引出了有关船舶领域的概念,也可以看作驾驶者相对于其他船舶和固定设施所需要的保持自由航行的一段有效区域。图1显示了一个特定的船舶在穿越英吉利海峡从敦刻尔克到多佛的过程中相对于其他船只和浮标的轨迹。船舶周围在可见的所有其他轨迹之外的区域就是这艘船舶的船舶领域。相似的概念也存在于其他运输方式中,事实上也适用于人与人之间的情形。对于道路运输,交通法规说明了领域限制应该是依据自己的车和前面的车之间剩下的距离来确定,但是所有司机都知道在实践中这个标准很大程度上取决于特定驾驶员的脾气和经验。通常相关的想法是隔开的标准,但是实际上是在控制飞机的运动来维持这些标准,这将减少飞行碰撞风险引起的错误。
相反的是,船舶之间并没有什么明显的分隔物但看上去像船舶领域确实存在 自动保持但是几乎被驾驶者完全忽略。理所应当的,域的实际形状和大小将取决于各种因素,一般概括为下面三个标题:
- 心理因素,例如航海者的航海经验和里程;
- 船舶特定的物力因素,例如航行者船舶的尺寸和相对速度;
- 一个地区对所有船舶普遍的物理因素,例如交通密度和天气情况;
- 数据来源。
由于研究的最终目的之一是考虑船舶领域对刚刚建议的各种独立变量的依赖性,因此有必要能够测量这些变量同时记录船舶运动。一个数据来源来自船舶官员在海洋雷达模拟器上进行避免碰撞演习的行为,但是必须验证来自具有一些现实生活经验的模拟情况的结果,作为第二个数据来源,在北海南部,一些交通调查在以沉没光船为中心的地区进行。
所使用的模拟器是伦敦金融城理工学院的输力强雷达模拟器,它是一个“三本船”模拟器,最多可以引入四个移动目标船;存在根据船只类型改变每艘船的响应的设施,并且可以产生多个替代海岸线。在控制台,Kelvin-Hughes光刻设备形成了绘制特定运动中涉及的所有船只的运动的简便方法。船舶人员在不同的职业生涯阶段来到理工学院进行避碰的雷达模拟器课程。在分析的样品中,航行经验的范围为6至41年。演习都是“发现”类型,因为在遇到这种情况之前没有对情况进行初步讨论。学生们也不知道,除了练习之后的课堂讨论之外,还会对他们的演习进行进一步的分析。因为所有的导航决定都必须基于雷达观测,所有的练习都假定在有1\ 4海里的可见性的雾中。
练习可以分为四种类型:
- 简单的开放海洋情况
- 其他开放的海洋情况
- 直布罗陀海峡局势
- 多佛海峡局势
类型(i)中每个学生都在一个类似目的地的相似船上,只能在雷达屏幕上看到教练控制的目标船的回波。在其他情况下,他可以选择他正在航行的船类,并且在他的屏幕上看到除了目标船的那些之外的其他“自己”船的回声。每个练习都是实时运行,并持续到碰撞情况已经解决,通常需要一个小时。从光照图中追踪船舶演习,从起始处以六分钟的间隔显示每艘船的位置;还记录了船舶的尺寸和最大速度以及航海者的海上航行时间长度的信息。
虽然模拟器练习提供了一种简单而方便的获取数据的方法,但考虑到学生在学习情况下可能会有不同的表现;如果发生什么事情可能会过于谨慎,因此他们的行为将在后面讨论。由于该领域被认为是要保持空闲的领域,因此导航的后顾之忧被最小化,这并不重要,因为合理的做法获得最大值而不是最小值。然而,由于模拟器结果的可见性差,所以应用程度有限;另一个缺点是可以只能有限的交通密度。
海上交通调查由伦敦理工学院导航学院研究船舶的约翰·卡斯爵士主持,主要在泰晤士河用雷达训练,并为此配备了三个雷达屏幕。因此,在不影响船舶航行的情况下,可以用一个进行调查工作。这次调查是在距离哈里奇大约12英里的地方进行的,集中在沉没的轻型船上,这提供了一个有趣的混合的导航考量。伦敦地区的试点船在靠近轻型船只的地方巡航,往返泰晤士河口的船只在这一点上带上或者放下领航员。这些包括在泰晤士港口和北欧之间的航线上的船只以及来自于英吉利海峡的不合适爱丁堡航道的大型船只。还有一种运输沿着浮标通道运输进出哈里奇和费利克斯托,这使得考虑在这样一个航道和公海的运动成为可能。其他运输包括沿东海岸运送,同时该地区的良好渔场吸引的一些渔船提供了另一个变数。调查区域覆盖交叉路线,交通密集度高,交通流量从各个方向汇聚。
3厘米海洋雷达显示的照片每隔三分钟拍摄一段尽可能长的时段,据分析,到目前为止,已经分三次拍摄了四十八小时的电影。通过预测连续拍摄,在调查期间可以根据通过该地区的船只得到痕迹。在哈维奇试点站的帮助下,可以在稍后阶段识别该地区许多船只,并且还可以单独识别一些船只,如渔船和渡轮。至少部分的,可以识别全部船只中41%的船只。当考虑不同的独立变量的分析时,这很重要。
- 建立领域。
由这些数据来源的船舶轨迹的痕迹,可以从任何一艘船开始,以确定任何给定时间点附近的所有其他船舶的距离和相对方位,以便其中央船的绘制。如果这个过程重复了第二个时间点,而第二个分布叠加在第一个时间点上,它将随时提供中央船附近其他船只的典型分布情况。如果这个过程在很多时间点被重复,那么图片应该更加明确。除了在几个时间点考虑一艘船,还可以将给定地区的每艘船依次视为中央船舶,并叠加获得的不同分配,从而建立代表各种船舶和时间的图片。图2显示了以这种方式建立的典型分布,并且清水的中心区域也是明显的,表明了领域。
编写了一系列计算机程序,为不同类别的中央船舶生产这些分配。对两组数据采取了6分钟的时间间隔,以避免以相对较低的速度行驶的两艘船只的过度代表性。使用模拟器数据,还决定排除每次运动的前十二分钟,让学生独立评估情况。教练控制的目标船舶不包括在中央船舶中。对于Sunk的调查数据,任何不在正常公海条件下航行的船只被排除作为中央船舶,例如渔船,靠近试验船的船只和浮潜航道的渔船。
根据“国际碰撞条例”的规定,船只周围的所有方向都不对称被认为是可能的。因此,预计靠近船首左舷的船只数量将会多于船首右舷,因为通过端点相遇的机会将会是从港口到港口的。由于它们不再是中央船舶导航员的直接责任,船舶也可能允许相隔较近的距离。因此,决定将中央船舶周围的分布分解为三个扇形。将任何时间点的每个中央船舶的参考线作为船头的方向,其他船舶的相对方位是在顺时针方向上测量的角度theta;,连接两艘船的线和参考线。这三个扇形可以定义为:
扇形1(右舷扇形)
扇形2(左舷扇形)
扇形3(船尾扇形)
为了找到船舶领域的边界,有必要考虑如果没有船舶领域这样的概念是什么情况。如果这是真的,那么中央船没有任何影响,任何一个扇形的距离x到中央船舶的分配应该是一条直线,如图3所示。这条线的斜率取决于该地区船舶的总体密度以及该扇形的尺寸。但是,如果有一个领域,那么本应靠近中央船只周围的船只将会从它周边消失。图3中的虚线显示了这种情况;船舶由 x lt;xA已经被移动到由(xA lt;x lt;xc)定义的区域中。在由(x lt;xA)定义的区域中,给定了均匀密度,船舶数量小于预期的数量,而在由(xA lt; x lt;xc)定义的区域中,船舶数量将超过预期均匀密度。对于xgt; xc,情况恢复正常,扰动的影响结束。
5.域边界的范围。
已经考虑了域边界的范围的各种可选定义,在本文中将被称为“多米尼加”。最简单的定义可能是任何人观察到的最近距离,即图3中的XD。这不是非常令人满意的,因为它不符合导航员想要自由的区域的真实概念,由于没有物理原因来保证领域不被侵犯,有些船可能会比所需离的更近,也许是由于误判或低效率的监视。 “多米尼加”将被一个极值扭曲,不会反映大多数导航员的态度。第二个定义可能是将所有船只的任意比例,例如10%或者5%作为距离。虽然这是很简单的应用,目标过于任意,因为很少注意船舶实际去做什么。另一个难题在于确定在离中央船舶有多远的地方,在计算百分比时应考虑船舶总点数。
以前的工作成果中发表类似概念的只有富士和田中。他们将“多米尼加”定义为与其周围密度最大化的中央船的距离。这个定义显然考虑到导航员的行为,考虑到大量船只已经杂乱无章的距离,但出于实际目的,这可能是一个过于保守的估计,因为船只在不造成太多问题的情况下愿意接受较小距离。此外,典型曲线的峰度是这样的,即最大值不是明确地定义,特别是如果数据是“嘈杂”的。从实际的角度来看,已经发现使用船舶点的数量更容易而不是密度。
图3中的距离xD,在这里,局部的最大限度提高了船舶点的数量,使得数值非常接近富士和田中所定义的数值。补充说一点,这些作者只考虑船舶的一个领域,所以概念在不同情况下是不同的。
人们认为,最合适的定义是在目前考虑的最大极值和最小极值之间产生一个值,但仍反映已发生的实际位移过程。 “多米尼加”被定义为图3中的距离xA;这个距离使得对于所有x lt;xA,船舶点没有船舶域的数量少于预期,而对于x = xA,情况首次等同于正常。它具有简单的操作解释的重要优点,标志着中央船舶的存在导致其他船舶预期数量减少的边界,并且在其外的其他船舶预期数量有所增加的边界。
6.计算域边界的方法。
一旦确定了定义,下一个问题的是计算“多米尼加”的实用性,给出相当不完美的数据;我们的这两套数据都产生了非常“嘈杂”的结果。一个主要原因是任何时间点的某个地区的船只不受中央船只单独影响,也不受彼此的影响。另一个原因是后续的时间点并不完全独立。模拟器数据具有其他尴尬的特征,因为重复的演习将在某些点产生高峰,其次,一旦避免了碰撞威胁,演习就会停止,因此只有一种接近的模式不是分离的模式。最后是与中央船相距较远的数据下降的一个主要原因。调查数据在雷达目标距离雷达距离较远丢失是主要缺点。这种损失与距离的四次方成比例,当分布在较远距离时导致了损失。因此,认为有必要在分析之前平滑原始数据,最简单和最令人满意的平滑方法是简单的三点移动平均值:其中E(x)是距离x处的平滑值,Y(x-1)是即时较小的实际值,Y(x)是实际值和Y(x 1)是即时更大的实际值。
下一个阶段是绘制均匀密度线的观察值图。然而,纯粹的图形化方法太主观,由于数据的缺失,代数拟合方法也不是很容易。为了得到位移曲线的代数方程,尝试了这些方法,但由于噪声数据,这些方程也不能一直成功。最令人满意的方法,称为位移数字的方法,利用了图3中的一点C达到在(x lt;xc)定义的区域内观察到的船舶点总数将等于该区域中具有均匀密度的船舶点总数。一旦点C位于可以画出均匀密度的线,并且“多米尼加”从平滑的观测数据的曲线中读取出切割该线的距离。其示例如图4所示,这种方法总是最可能产生一个结果,即得出不完美的数据。然而,在项目的这个理论方面,更多的工作正在进行中,因为使用易于计算机化的分析方法是有用的,并且将给出一种估计“多米尼加”标准误差的方法。下面给出的结果显然仅来自数据样本,并没有引用其精度的估计。重要的是结果的模式,而不是任何个别的结果。本文提出仅考虑结果的选择。
7. 结果。
在一些不同因素的影响下考虑了船舶的大小和形状。调查的自变量及其资料来源如下:1.海域类型模拟器和沉没测量数据2.相对速度模拟器和沉没测量数据3.总吨位模拟器和沉没测量数据4.船舶长度沉没测量数据船舶5.最大速度模拟数据6.船舶航行器海上经验长度模拟数据7.作为中央船舶的渔船沉没调查数据 8.其他船舶对渔船的反应9.浮标10.限制通道11.交通密度12.中央船舶模拟器。
(1)海域类型。表1显示了从模拟器数据看不到的三个不同海域的“多数”的计算值,以及南海南部从Sunk调查数据的良好可见度。正如可以预见的那样,开放海洋的价值观是最大的,因为这里一艘船具有最大的机动自由度。同样,直布罗陀海峡的价值要大于交通堵塞的多佛海峡。应该提到的是,对这些价值观进行
全文共6191字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144322],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 基于换乘网络的公交接驳线网优化外文翻译资料
- 公路综合运输系统设计与开发研究外文翻译资料
- 然而,由于问题的复杂性,他们的模型只能由启发式解决方法,得到次优解。外文翻译资料
- 安吉川达集装箱码头后方堆场布局仿真优化设计外文翻译资料
- 3.1 基于EPQ模型无缺货延迟策略分析外文翻译资料
- 三峡库区船舶交通流分析及预测外文翻译资料
- O.R.运输规划在货运代理公司的创新应用tabu搜索算法的综合业务运输规划问题外文翻译资料
- 应急物流规划的稳定优化:人道主义救援供应链中的风险缓解外文翻译资料
- 一种预测和估计城市网络交通需求的组合方法外文翻译资料
- 基于GIS和数据包络分析的考虑社会优先级的城市公交路线运输系统效率评估的多模态数据建模外文翻译资料

