英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
机器视觉和应用(2015)26:55-68 DOI 10.1007 / s00138-014-0636-z
原始论文
用于视网膜血管检测的自适应匹配滤波器
Tapabrata Chakraborti · Dhiraj K. Jha ·Ananda S. Chowdhury · Xiaoyi Jiang
收稿日期:2013年11月12日/修订日期:2014年5月17日/接受日期:2014年7月16日/在线发布日期:2014年8月19日copy;柏林海德堡2014
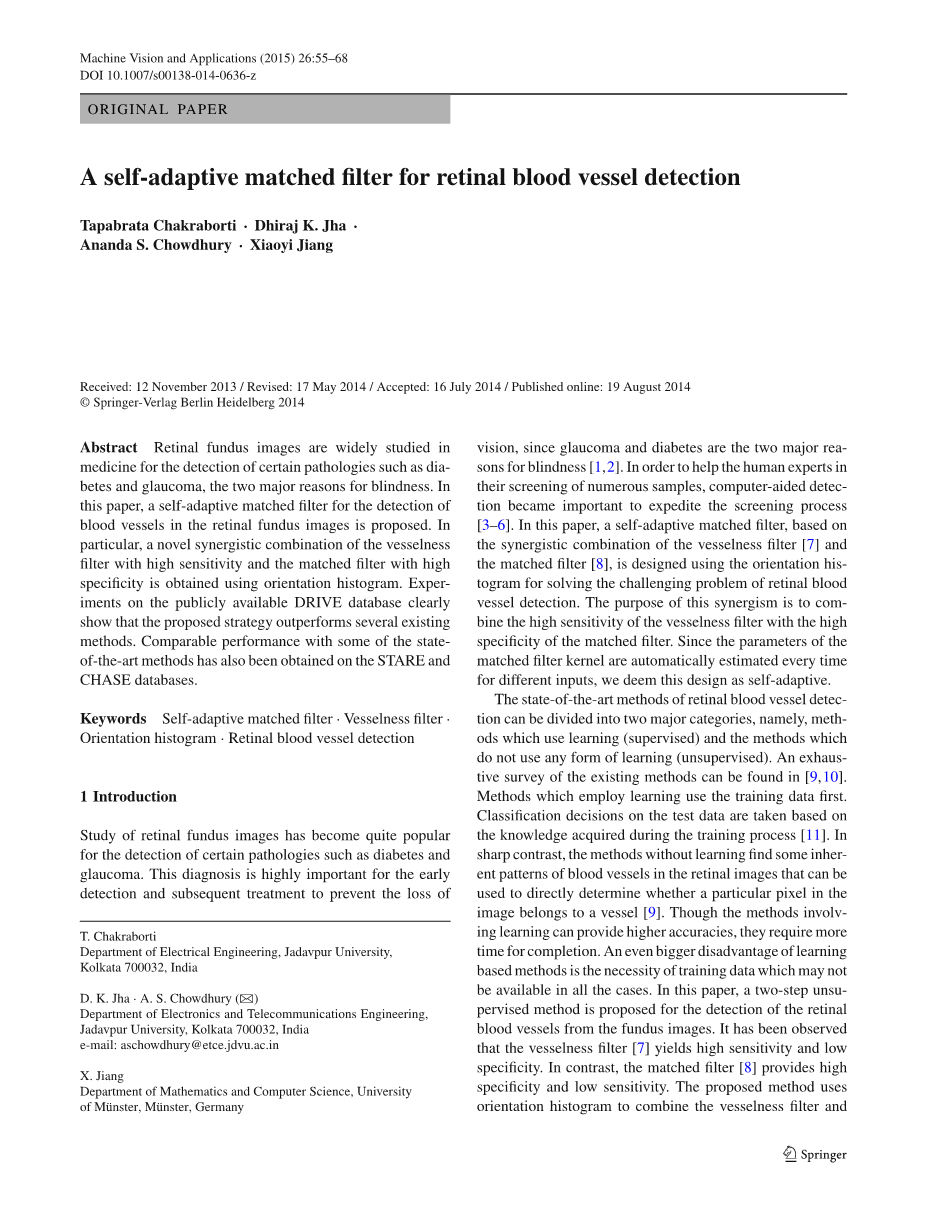
最先进的视网膜血管检测方法可分为两大类,即使用学习(监督)的方法和不使用任何形式学习(无监督)的方法。对现有方法进行详尽的调查之后可以发现[9,10]:采用监督的方法,首先得要使用测试数据。测试数据的分类决策是基于测试过程中获得的数据[11].根据测试过程中获得的知识对测试数据进行分类决策 [11]。与这些不需要监督的方法形成鲜明的对比,而不需要学习的方法可以在视网膜图像中找到一些血固有的血管图案,可以用来直接确定图像中是否有特定的像素 [9]。尽管涉及监督的方法可以提供更高的精度,但它们需要更多的时间才能完成。基于监督的方法的一个更大的缺点是测试数据的必要性,而这些数据可能并非在所有情况下都可用。本文献中,提出了一种两步无监督检测眼底图像视网膜血管的方法。据观察,血管性滤波器 [7] 具有高灵敏度和低准确性。相比之下,匹配滤波器 [8] 提供了高准确性和低灵敏度。该方法利用方向直方图将血管性滤波和匹配滤波相结合,实现了高精度(高灵敏度、高准确性)检测。此外,不同于其他一些无监督的方法[12],本文所提出的算法仅使用一次通过,因此速度相对较快。首先将基于 Hessian 矩阵特征值的血管滤波器[7]应用于视网膜图像的输入,下一步计算血管滤波器输出的方向直方图,该方向直方图由5种优秀的高斯函数组成,匹配滤波器[8]以这五个高斯函数的线性组合为核心算子并且根据方向直方图自动估计内核的相关参数。最后利用上述核的匹配滤波器来提高对已有血管的检测能力。
摘要 视网膜眼底图像在医学上的研究非常广泛,用于检测糖尿病和青光眼等某些病变,这是导致失明的两个主要原因。本文提出了一种用于检测视网膜眼底图像血管的自适应匹配滤波器。特别的地方是,使用方向直方图获得具有高灵敏度的血管滤波器和具有高准确性的匹配滤波器。在公开的DRIVE数据库上进行的实验清楚地表明,所提出的策略优于现有的几种方法。在STARE和CHASE数据库方面,也采用了一些相互兼容的先进的方法。
关键词 自适应匹配滤波器·容器滤波器·
方位直方图·视网膜血管检测
1介绍
视网膜眼底图像的研究已经变得非常流行,用于检测诸如糖尿病和青光眼的某些病症。这种诊断对于早期发现和之后的治疗非常重要,以防止伤害视力,因为青光眼和糖尿病是导致失明的两个主要原因[1,2].为了帮助专家筛选大量样本,计算机辅助检测对于加快筛查过程非常重要[3–6].在本文中,一个自适应匹配滤波器,基于容器滤波器和匹配的过滤器[8]的组合[7],使用方向直方图理念,以解决视网膜血管检测的问题。这种组合作用的目的是将容器过滤器的高灵敏度与匹配过滤器的高准确性相结合。由于每次针对不同输入,会自动估计匹配滤波器内核的参数,所以我们认为该设计是自适应的。
图1所提方法的流程图
[15]使用匹配滤波器和蚁群的混合模型来实现改进的血管检测。Frangi 等人[7]利用Hessian 矩阵的特征值设计了一个多尺度的血管滤波函数,用来评估图像的每个像素。该方法的灵敏度仍然很低。这些技术从一定程度上改善了匹配滤波器的性能。但是,这些方法都没有根据单个输入自动设计匹配的过滤器内核。一些作者已经将蚁群优化技术与匹配滤波方法结合起来。蚁群优化是一种元启发式算法,迭代过程的时间成本很高。Frangi等人提出了一种易受噪声影响、特异性低的血管性滤波器。
本文的其余部分安排如下:在第2部分,介绍了一些相关的工作以及我们的贡献。在第3部分,详细描述了所提出的方法。在第4部分,实验结果与几种现有方法的比较一起显示。该论文在第5部分中得出结论,概述了未来研究的方向。
本文利用方向直方图实现了血管滤波器和匹配滤波器的非线性协同组合。这种组合提高了血管滤波器的准确性和匹配滤波器的灵敏性,以产生较高的总体准确性。血管的方向信息是自动自适应设计的关键输入,对特定的输入图像是唯一的。匹配滤波器的核心为方向直方图中五个显著的最小重叠高斯函数的线性组合。血管的方向信息是自动自适应设计的关键输入,对特定的输入图像是唯一的。
2 相关工作
由于血管分割问题在人类视网膜病理学中的许多重要医学应用,多年来一直在进行广泛的研究,提出了一系列有根据和无根据的方法。由于所提出的算法不采用任何学习策略,我们只回顾一些流行的视网膜血液的血管检测方法。Chaudhuri等人[8]提出了一种基于匹配滤波器的方法,其中单个高斯核以零旋转角为中心,用于检测视网膜血管。Chanwimaluang和Fan[13]在[匹配滤波器]中添加熵阈值和长度滤波[8]用于进一步改善血管检测。Zhang等人[14]提出了一种具有高斯一阶导数的新型匹配滤波器,以便更好地进行检测。Cinsdikici和Aydin
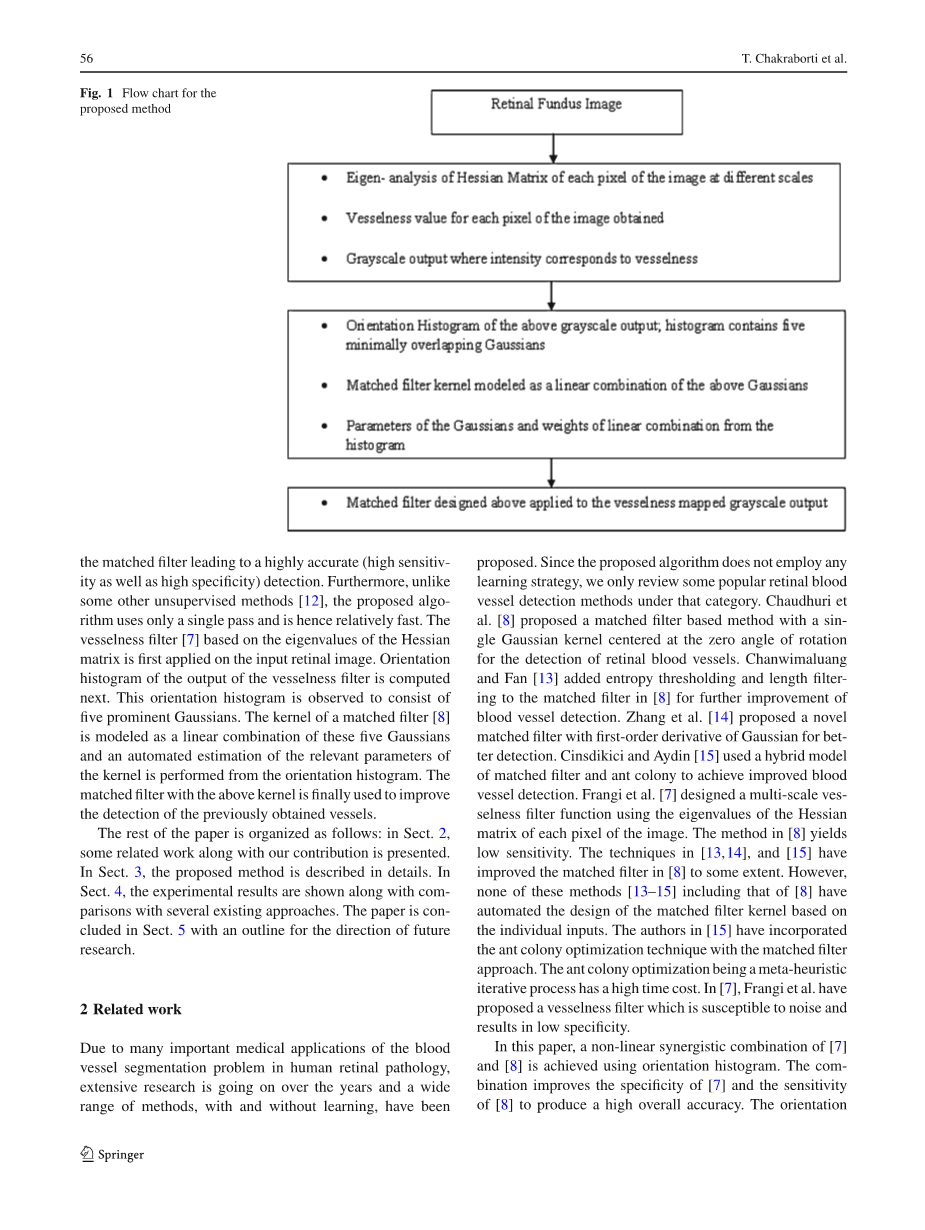
图2方向直方图:来自DRIVE数据库的图像
因此,我们的主要贡献是在第一阶段使用血管滤波器输出的方向直方图来设计第二阶段的自适应匹配滤波器的参数。这种自适应匹配滤波器具有高灵敏度和高特异性,因此具有较高的精度。此外,我们的算法只需要一次通过就可以完成整个过程。所提出的解决方案的另一个优点是它完全 无人监督,因此不需要训练集。
匹配滤波器的核心为方向直方图中五个显著的最小重叠高斯函数的线性组合。这些高斯函数的参数(平均值、标准差)以及线性组合(增益)直接从方向直方图自动估计。由于这些参数对于不同的输入图像具有不同的值,匹配的过滤器是对每个特定输入进行自适应。据我们所知,这种利用血管方向的血管滤过器和匹配滤过器的非线性协同组合对于视网膜血管检测还没有报道。
除了 [8,13–15],并将该方法的计算结果与其他几种已知方法[16–22]进行了比较。在[16]中,Jiang and Mojon使用了一种基于自适应阈值的血管分割算法。Al-Diri等人[17]提出了血管分割的两阶段方法。第一阶段包括形态滤波器,第二阶段使用神经成本函数解决交叉点配置。在[20]中,作者提出了一种基于线跟踪的多尺度血管分割算法。Kaba等人在[21]中提出了一种利用概率建模和期望最大化的血管提取方案。在[22]中,Bankhead等人使用了小波以及边缘位置优化,以开发视网膜血管分割方法。[16,17,20–22]中的方法都没有采用任何形式的研究。Staal等人[18]利用监督学习,提出了一种基于脊线的血管分割技术,采用了基于KNN的分类器。Marn等人[19]还提出了一种基于不变矩阵特征的血管分割监督的方法。与[18]和[19]相比较,进一步强调拟议战略的力度。
|
Image |
sigma;1 A1 |
sigma;2 A2 |
sigma;3 A3 |
sigma;4 A4 |
sigma;5 A5 |
|
01_test.tif |
2.33, 0.4365 |
2.23, 0.2800 |
1.93, 1.00 |
2.13, 0.3200 |
2.36, 0.4327 |
|
02_test.tif |
2.30, 0.4398 |
2.16, 0.2530 |
1.90, 1.00 |
2.10, 0.3220 |
2.30, 0.4403 |
|
03_test.tif |
2.36, 0.4142 |
2.23, 0.1850 |
1.96, 1.00 |
2.16, 0.1940 |
2.33, 0.4145 |
|
07_test.tif |
2.30, 0.4413 |
2.20, 0.1810 |
1.96, 1.00 |
2.10, 0.1910 |
2.33, 0.4435 |
|
09_test.tif |
2.36, 0.4450 |
2.20, 0.1860 |
1.90, 1.00 |
2.13, 0.2020 |
2.36, 0.4439 |
表1根据DRIVE数据库的五个数据集的方向直方图估计的参数
图4:对驱动器数据库的02_test.tif图像使用建议的方法进行血管检测。a输入图像,b输出电压滤波器,c方向直方图(B),d最终输出(精度=0.9421),e为真值
表2测量数据
现在对于某个尺度sigma;(标准偏差),(x,y)处的像素的Hessian矩阵Hsigma;,(x,y)由下式给出:
Hessian矩阵的不同元素表示为:
对于Eqs(3)–(5),I表示输入图像,*表示卷积。
特征值lambda;1和lambda;2 (其中lambda;1 lt;lambda;2 )然 后计算Hessian矩阵。对于特定像素,由容器值V给出[7].
图4使用针对DRIVE数据库的02_test.tif图像的建议方法的血管检测。a输入图像,b输出容器过滤器,c 方位直方图(b),d最终输出(精度= 0.9421),e基础真值
3拟议的方法
该方法包括两个步骤,如图1所示。第一步,Frangi等人的血管过滤器。血管滤波器应用于输入。在第二步中,根据血管滤波器输出的方向直方图,设计了一种自适应匹配滤波器。这是通过提取方向直方图中的相关信息来估计匹配滤波核的参数来实现的。该匹配滤波器应用于血管滤波器的输出。
3.1容器滤波器
基于Hessian矩阵特征值的图像结构检测是一种完善的程序。弗朗基等人根据上述原理设计了一种多尺度血管增强滤波器。近年来,Liu等人也使用了血管过滤器,检测图像中的斑点结构。一个二维高斯滤波器,它可以用以下公式表示:
图6 DRIVE数据库的ROC曲线。a 01_test.tif(AUC = 94.53)和b 02_test.tif(AUC = 95.21)
图5使用所提出的方法对STARE数据库的im0163.ppm图像进行血管检测。a输入图像,b输出容器过滤器,c方向直方图(b),d最终输出(精度= 0.9491),e基础真值
灰度化输出的方向直方图,而不是它的二进制版本。这是因为方向直方图保留了所有像素的完整方向信息,否则这些信息会由于二值化而丢失。要构建方向直方图[24],就要计算每个像素的方向角。对于Vesselness滤波器输出图像I1(x,y)处的每个像素,我们可以写:
对于完全二进制(即n位)图像,每个像素的强度值为0或2^nminus;1。因此,两个像素之间的强度差可以是{0、minus;2nminus;1和2nminus;1}之中的任何一个。因此,根据式(11),方向角属于集合{minus;90、minus;45、0、45、90}。由于方向直方图根据方向角绘制像素数,因此对于完全二值化的图像,方向直方图必须只在上述五个角度上给出脉冲。如果Vesselness滤波器的输出与二值图像的输出非常相似,那么我们可以期望找到五个最小重叠的Gaussian,其平均值在上述一组角度上(见图2b,d)。
图7驱动器数据库01_test.tif图像不同方法的输出。该方法的a输入图像、b真值图像、c输出(精度=0.9302)、Frangi等人的d输出[7](准确度=0.9231),Chaudhuri等人的e输出[8](精度=0.9170),Chanwimaluang和Fan的 f 输出[13](精度=0.9295)
3.2方向直方图
如第4节中的实验所示,Vesselness滤波器的输出图像往往具有较高的灵敏度和较低的准确性。该方法利用匹配滤波器克服了这一固有缺陷,匹配滤波器是根据Vesselness滤波器输出的方向直方图设计的。匹配的滤波器内核通过小角度旋转内核并注意最大匹配度来使用每个像素的方向角。血管系统的定位起着重要的作用,目前还没有人对其进行探讨。在这种情况下,强度直方图是不够的,因为不同的输入图像具有不同
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[439933],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

