
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
汽车刮水器系统的混沌振动控制
郑望,K.T. Chau 电气与电子工程学院,香港大学,薄扶林道香港,中国接受2007 1月2号
摘要:
在一定的擦拭速度下已确定汽车雨刷系统的混沌振动。这种不规则的振动不仅降低了擦拭效率,而且降低了驾驶舒适性。本文的目的是提出稳定雨刮系统混沌振动的一种新方法。关键是采用扩展时延反馈控制,这样就可以根据其电枢在线调整刮水器电机的施加电压和电流反馈。以一个实用的雨刷系统的为基础,它验证了所提出的方法可以成功地稳定混乱的振动,并提供了广泛的擦拭速度。
1.介绍
根据已知发现,混沌行为发生在机械系统的干摩擦或拍击振动[1,2]。雨刮系统作为汽车的重要设备,也存在着混沌振动。在雨刷系统中,一些研究人员实验检测到在一定的擦拭速度[ 3 ]下存在混沌或颤振。这种不规则的振动不仅降低了擦拭效率,而且降低了驾驶舒适性,此外,还存在着安全隐患。为了抑制这种混沌振动,也为了稳定[4 ],线性状态反馈控制方法已经出现。然而,这种控制方法需要在线测量的雨刷臂的角速度,这是不切实际的实现。
本文的目的是提出一种新的方法来稳定在汽车雨刷系统中的混沌振动。该方法具有两个明显的优点,即高实用性和高效率。前者可以在实际实施的基础上具有合理的成本,而后者则可以确保在不同条件下有效性的稳定。
为了实现高实用性,反馈参数应易于测量。因此,电气如刮水器电机的电压和电流的参数是优选的机械参数,如雨刷臂的角度偏转和角速度。由于电枢电流正比于雨刮电机产生的转矩,这实际上是一个永磁直流(PMDC)电机,它是作为可测量反馈参数稳定雨刷系统中的混沌振动的一种选择。事实上,电枢目前在DC传动系统的混沌运动识别和控制中发挥了重要作用[ 5 - 7 ]。
为了达到较高的效率,控制方法不应该涉及复杂的计算实现或对系统动力学施加不必要的扰动。常用的稳定混沌方法有,OGY方法[8,9],延迟反馈法[ 10 ],非反馈方法[11,12],比例反馈方法[13,14],非线性控制方[15,16],自适应控制方法[17,18],神经网络方法[19,20]和模糊控制方法[ 21 ]。其中,时滞反馈方法具有一定的优势:它不要求先验分析系统动力学的知识,它不需要应于所需的不稳定周期轨道的参考信号(UPO);它不需要快速采样或系统状态的计算机分析。此外,当延迟时时间接近理想的UPO [ 22 ]的时,相应的扰动很小。扩展的延时自动同步(带动)方法是一个有吸引力的扩展版本的时间延迟反馈方法,因为它可以显着扩展参数域的有效控制方法[23,24]。因此,预计带动的方法可以用来稳定混沌在很宽的擦拭速度范围内的雨刷的振动。
2.动态模型
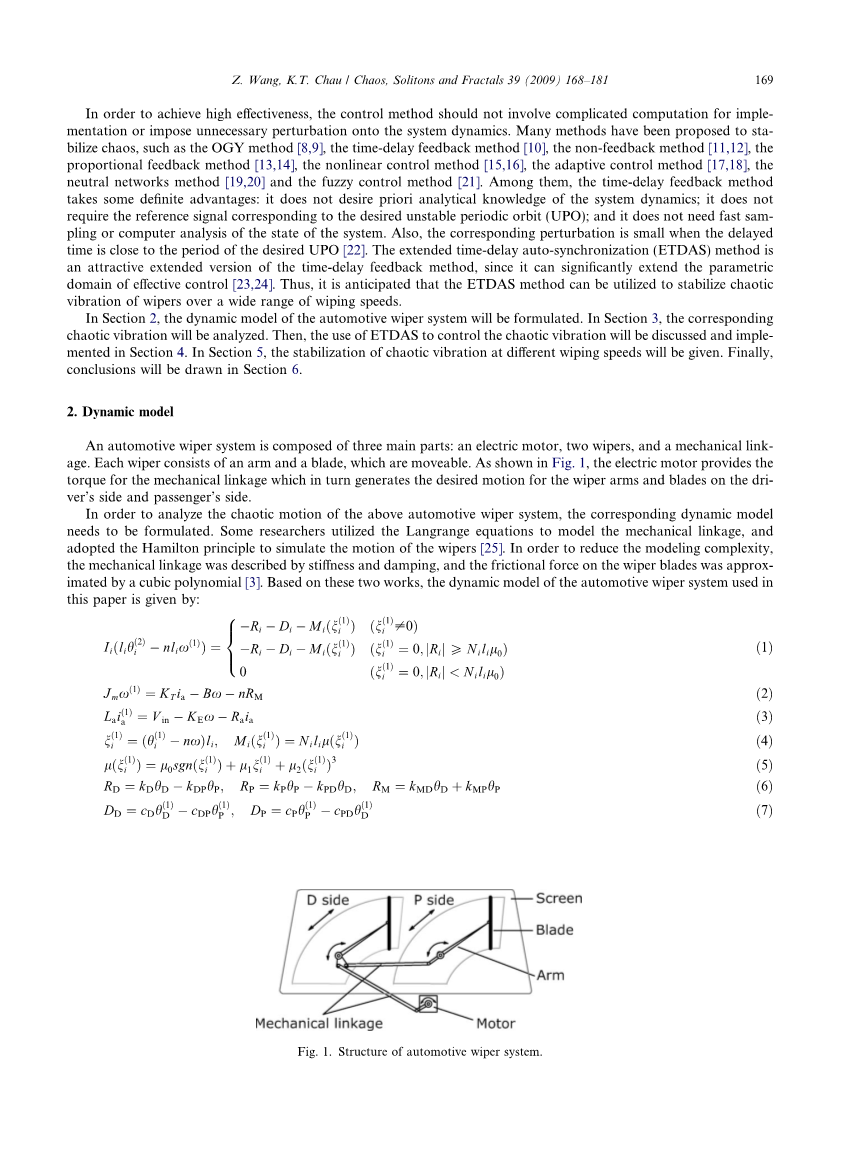
汽车刮水器系统由三个主要部分组成:电动机,两个雨刷,和机械联动。每个雨刮器由一个臂和一个刀片,这是可移动的。如图1所示,电动机提供机械联动的扭矩,从而产生雨刷臂和侧边和乘客侧的叶片上的驱动程序所需的运动。
为了分析上述汽车刮水器系统的混沌运动,需要建立相应的动力学模型。一些研究人员利用郎让锷方程来模拟机械联动,采用哈密顿原理模拟雨刷的运动[ 25 ]。为了减少建模的复杂性,机械连接描述的刚度和阻尼,以及在雨刷叶片上的摩擦力近似由三次多项式[ 3 ]。基于这两个工程,本文使用的动态模型的汽车雨刷系统为:
图1.汽车刮水器系统结构
i = D,P分别表示司机的一侧和乘客的一侧,;Ii是时刻的惯性的雨刮器手臂;李是雨刷臂的长度;HI是雨刷臂的角度偏差;n是减速比在机械连杆和电动机之间;X是电机转速;RI是由弹性力产生的力矩;DI是由阻尼力产生的扭矩;米是由之间的摩擦力产生的扭矩雨刮片和屏幕;Ni的力量压在雨刷臂弹簧;Neth;1THORN;我是相对速度的雨刷片相对于屏幕;Vin是电机的输入电压;IA是电枢电流的电机;KT是电机的转矩常数;柯是电机的反电动势常数;B是粘滞阻尼电机;Ra是电机的电枢电阻;La是电机的电枢电感;JM是力矩电机的惯性;RM是恢复电机转矩;L0、L1和L2之间的干摩擦系数雨刷叶片和屏幕,KD,KP和KM的刚度系数的机械联动;CP和CDP是机械连杆的阻尼系数。该动态模型的等效电路图显示在图2。
图2.汽车刮水器系统等效模型
应当指出的是,参数的雨刷是基于一个实用的汽车雨刷系统[ 3 ],电机的参数是基于三洋电机m818t031永磁直流电动机。所有这些参数都列在表1。
表一
系统参数:
3.混沌分析
由于Vin通常是由用于执行速度的永磁直流电机控制,因此把它作为分岔参数混沌分析。基于动态模型描述(1)-(10),分岔图的HD和HP关于VIN的绘制如图3所示。可以看出,该系统展品期间一个运动的区域IV和VI,而不稳定的振动在区域I,II,III,和V.这些现象实际上解释了为什么存在汽车雨刷有预定义的几个擦拭速度。此外,Heth;1THORN;轨迹D与HD在六典型VIN的值(对应于六个操作区域)绘制如图4所示。可以发现,轨迹与VIN = 3.5 V和VIN = 10.8 V表现出次谐波运动的区域II和V,分别的轨迹与VIN = 2 V和VIN = 4 V表现出混沌行为的区域I和III区,分别。因此,它证实了雨刷的混沌振动发生在一定范围内的VIN或擦拭速度。
从数学上证明了存在的混乱,最大Lyapunov指数前需要计算。这个
系统状态变量的解流表示为
在Tt描述X跳演化图,及其偏差DX溶液流动了:
图3.关于VIN的分岔图:驾驶员侧(a)和乘客侧(b)
图4.Heth;1THORN;轨迹D与HD:(a)VIN = 2 V;(b)VIN = 3.5 V;(c)VIN = 4 V;(d)VIN = 8 V;(E)VIN = 10.8 V和(f)VIN = 12 V
x0的Ut描述的是DX跳进化图。然后,对高维系统的Lyapunov指数KI可以计算为
其中Delta;t是进化的时间,eji是在两步的高维状态空间的3个基向量。它可以指出,eji应该是正交归一化在迭代的每一步。当Delta;tlt;lt;1且||eji||lt;lt;1(13)时,可以近似为[26,27]
图5.高清波形:(a)VIN = 2 V;(b)VIN = 3.5 V;(c)VIN = 4 V;(d)VIN = 8 V;(E)VIN = 10.8 V和(f)VIN = 12 V。
因此,lambda;i的最大值可以计算出,即lambda;max = 1.671当输入电压= 2 V和lambda;max = 0.346时,VIN = 4 V。相应的阳性值数学证明,在I和III的区域有混乱的振动。
此外,示于图5的在周期性运动表现出规律的theta;D的振动波形,混沌运动呈现不规则振动。如上所述,这种不规则的振动对安全有害驱动.以theta;(1)P的固定值抽样,相应的庞加莱acute;地图相对于theta;D—theta;(1)P如图6所示。可以看出,周期运动具有单点如图6D表现和F;次谐波运动显示了几点如图6B和E;和混沌运动的描述不规则分布点如图6A和C所示。
图6.庞加莱acute;图theta;(1)D versustheta;D:(a)输入电压为2 V;(b)输入电压为3.5 V;(c)输入电压为4 V;(d)VIN = 8 V;(e)VIN = 10.8 V(F)的VIN = 12 V。
- 控制方法
为了有效地稳定在汽车雨刮系统的混沌振动,采用带动法。控制原理可以表示为:
其中x和y是系统的状态变量,F(y,x)是扰动项,tau;是延迟时间,k是反馈
增益,Risin;[0,1)是回归参数。通过定义S(t),(16)可以
被写成:
其中S(t)为:
当gamma;=sigma;-1,(18)可以写为:
为了切实贯彻法的永磁直流电机带动,容易衡量的电气参数电动机,即电枢电流ia,用作反馈控制参数。因此,ia被选为y在(15)-(19),而x在(15)-(19)表示其他状态变量:theta;D,theta;(1)P,theta;P,theta;(1)D和omega;。然后,通过合并(16)成(3),动态方程可以得到:
因此,输入电压参考V*in在对永磁直流电动机的电压扰动Delta;V调制,这是
表示为:
相应的控制框图如图7所示。因此,整个控制系统可以很容易地实现由脉宽调制(PWM)直流-直流转换器,如图8所示,其中控制信号VC是由于V*in和瞬时输入电压Vin之间的差异造成的,和VST是锯齿波信号PWM的产生。
图7.ETDAS的控制框图
图8.PWM直流直流变换器的控制–带动
(22)实现的关键是确定R正确价值观,tau;和K。首先,既然R值影响K的范围为了有效的稳定[ 24 ],R被选择为0.85,使K的范围是足够宽,以稳定在不同的系统擦拭的速度。其次,通过分析IA的时间序列,基波和次谐波轨道的周期
嵌入式系统可确定[ 28 ]。因此,选择的是0.0339s等于基本周期在Vin的特定值轨道[ 29 ]。第三,在六个代表的K的HD的分岔图Vin的值绘制如图9所示。可以看出,当K被选择为2000,期间1运动可以达到所有地区。
在取代R = 0.85 s = 0.0339 s和K = 2000到(21)和(IA),波形的ia和V*in
在拟议中模拟如图10所示是带动控制方法。可以看出,相应的涟漪非常小,因此验证所提出的方法只施加非常小的扰动到系统上。
图9.分岔图的HD相对于K:(a)VIN = 2 V;(b)VIN = 3.5 V;(c)VIN = 4 V;(d)VIN = 8 V;(E)VIN = 10.8 V和(f)VIN = 12 V
图10.ia和V*in的波形在带动控制:(一)输入电压为2 V;(b)输入电压为3.5 V;(c)输入电压为4 V;(d)VIN = 8 V;(e)VIN = 10.8 V(f)VIN = 12 V.
- 结论
首先,theta;D—theta;D(1)板上的系统的轨迹进行评估时,Vin = 2 V,这对应于I区与混沌轨迹如图4a显示相比,稳定的轨迹如图11a显示验证该系统可以成功地稳定到周期1运动带动控制。图12a显示相应以带动2瞬态响应控制应用在t = 7 s可以看出混沌波形如图5A所示,可快速稳定。其次,当Vin = 3.5 V,如图4和5b,对应于区域II次谐波周期2运动描绘可以稳定到周期1运动带动控件如图11、12b所示。第三,类似的情况下,在该地区的I,当Vin = 4 V对应的区域III,混沌运动由图4和5C描绘成一段可以成功地稳定所控制的一种运动,带动无花果。11和12C。第四,当输入电压为8 V,对应于区域IV,原本稳定的周期运动如图所示。第4和第5与所带动的使用控制图11、12d没有任何的变化。第三,类似的情况下,在该地区的I,当Vin = 4 V对应的区域III,混沌运动由图4和5C描绘成一段可以成功地稳定所控制的一种运动,带动无花果。11和12C。第四,当输入电压为8 V,对应于区域IV,原本稳定的周期运动如图所示。第4和第5与所带动的使用控制图11、12d没有任何的变化。
图11.theta;D(1)轨迹theta;D与高清带动控制:(一)输入电压为2 V;(b)输入电压为3.5 V;(c)输入电压为4 V;(d)VIN = 8 V;(e)VIN = 10.8 V及(f)VIN = 12 V
第五,类似于在区域II的情况下,当Vin = 10.8 V对应于该地区V,次谐波图五所描述的周期。4和5E可以稳定到周期1运动带动控制无花果说明。11及12E。最后,当输入电压为12 V,对应于六区,原本稳定的时期—图所描述的一个运动。4和5F可以带动的使用进一步提高控制说明无花果。11、12层,从而实现一个较小的振幅。
需要注意的是,随着带动控制使用的振幅在IV区原本稳定期内的一项议案没有进一步改善,而在六区可以进一步提高利用带动控制。事实上这是由于,在该地区即使没有带动振动控制,IV已经提供了最小振幅。
为了评估的有效性能一目了然,图13显示了HD和HP的分岔图方面的Vin
带动控制。与没有控制的分岔图相比,如图3所示,很明显,所提出的控制方法不仅有效地稳定了混沌和次谐波运动,也最大限度地减少在整个工作范围内雨刷的振幅。
图12HD与带动控制瞬态响应:(一)输入电压为2 V;(b)输入电压为3.5 V;(c)输入电压为4 V;(d)VIN = 8 V;(e)VIN = 10.8 V及(f)VIN = 12 V.
- 结论
在本文中,已经提出了一种新的方法来稳定在汽车刮水器系统的混沌振动。关键是要采用这样一种方式,根
全文共9205字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[142717],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

