英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
HyQ机器人液压驱动的机械腿原型的设计和实验评估
摘要:本文主要针对液压驱动的机械腿的设计与实验评价。腿的样机测评是HyQ(液压驱动四足机器人)发展中的一个重要里程碑。样机的主要特征在于两个分别为4.5千克重的由液压缸驱动的旋转接头。我们进行了几项实验,来测试腿的样机在连接到一个垂直滑块的情况下,其力学设计和液压驱动系统的鲁棒性。除了液压元件的实验评估,我们还广泛研究了腿在周期性跳跃期间的传感器数据。实验结果表明,液压驱动因为其高功率重量比,高响应速度,以及应对高冲击力峰值的能力,而适用于多足机器人。此外,我们通过比较由负载传感器获得的液压缸压力数据与基于液压缸压力的计算值,来分析在将来它是否能够消除这个感知系统的冗余。通过这些研究,我们确定了设计中的缺陷,并就如何改善这些缺陷给出建议。
重点词汇—跳跃机器人,机械设计,液压驱动,合规性
.引言
目前大部分机器人为关节处采用电动装置来提供动力,这种方法十分流行,因为其价格便宜,适用于大型尺寸,准确且易于控制。它们产生的速度高,但产生的扭矩相对于它们的尺寸和重量通常非常小 [1] ,因此必须利用减速齿轮将速度转化为扭矩。但是这些齿轮给致动器单元引入了我们所不期望的摩擦和间隙,并降低了致动器单元的效率和背向驱动性 。确切的说,这些齿轮正日益成为电动机组件的最弱元件之一[2]。
多足机器人所需要的致动器,特别是那些被设计用于高动态的,高负荷的,如跑步,跳跃等的任务的致动器,必须足够健壮来应付脚向下接触地面时产生的大冲击力的峰值。但是受到过大的扭矩峰值时,减速齿轮很容易损坏,因此减速齿轮并不适用于高动态的多足机器人。
研究人员已经开发了多种解决方案来解决这个问题:机械弹簧串联电动机或流体驱动器,如气动或液压装置。前者的技术已经成功应用于一些跳跃和跑步机器人。
ARL单脚架是电驱动的平面机器人,它的棱柱形腿部安装了一个弹簧,其跳跃速度最高可达到1.2m/s。这是当时最快的电驱动多足机器人[3]。更多的近代机器人采用了这种技术,包括安装了板簧的ECD腿[4]和能够进行小跑的四足机器人KOLT [5]。
气动和液压致动器是由加压流体驱动的,如分别由空气或油驱动。这些流体的可压缩性使致动器有一定程度的固有柔度。虽然空气容易压缩,而石油十分稳定,油压系统的动态响应主要取决于液压油管的内部容积和油的体积模量(压缩率的倒数),它和夹带的空气量以及软管的弹性有关[6]。液压驱动系统通常在20MPa左右的高压下工作(但在某些系统中可高达70MPa)。这导致致动器具有非常高的功率重量比和快速响应。这些特性再加上固有的柔韧性使液压致动器成为十分适合高动态多足机器人的候选者。
在20世纪80年代,Raibert和他的团队先后在卡内基梅隆大学和麻省理工学院开发了一系列气动和液压机械腿的多足机器人,能够完成自主平衡,在三维空间单脚跳(单脚架),翻一个跟头(两足),以及用几种步态跑步,如慢跑,踱步和跳跃(四足)[7]。他们用液压执行器完成腿部定位和推力的产生,利用气动弹簧进行能量存储并产生柔韧性。
在二十世纪九十年代后期,Hyon等人构建了KENKEN,一个由液压驱动的平面单脚架,它包含了机械弹簧的仿生足设计。它成功地跳跃到了一个吊杆上[8]。Sarcos制造了几个液压致动的人形机器人(例如CB,DB),将它们用于研究动态平衡和动态全身体动作[9] - [11]。
近年来,Raibert等人在波士顿动力公司不出意外地用他们令人印象深刻的四足机器人BigDog的影片使市民感到震惊。该液压驱动机器人的最新版本长约1.1米,宽0.3米,高1.0米,重约110千克。其驱动系统由一个车载内燃机驱动,这使得它的功率自治可达到2.5小时 [12]。它能够以小跑或踱步的步态运行,在粗糙不平和倾斜的地面上移动,并在受到大的侧向力后,在雪地或冰面上保持其平衡。该项目的目标是创建一个机械骡,它能够携带设备,并在各种地形自主跟随士兵行进 [13]。虽然大狗的视频在网络上十分受欢迎,但不幸的是,几乎没有关于机器人的设计,规格以及控制的细节发布出来。
我们目前正在构建一个四足机器人(简称HyQ)它包含了液压和电动致动器的组合。每条腿有髋关节和膝关节屈曲/伸展关节两个液压自由度(DOF)和一个电自由度的髋外展/内收关节。该项目的目标是开发一个山羊或小马驹大小的机器人平台,能够执行高度动态的任务,如跳跃,跳跃和奔跑。除了四足运动,平衡和能源效率的研究,机器人将作为一个平台来测试多足机器人小型液压元件的适用性,可能被用于在灾区,雷区进行搜救任务,以及在危险的环境为人们运输人道主义物资并完成其他各种任务。关于该项目的更多细节示于[2] [14]。
第一个里程碑是构建一条腿部样机,来测试机械设计和液压驱动系统,并评估其潜力,使机器人能够执行高度动态的任务。本文重点介绍了腿部设计中的液压驱动并展示了将腿部连接到滑块的几项研究的实验结果。
本文结构如下:第二节给出了四肢动物生物学研究的概述。第三节介绍了液压腿部样机的设计,部件和运动学,并在第四节展示出的几个实验的结果。第五节提出结论和对未来工作的意见。
II.自然界中的四足运动
大自然已经创造了大量不同的,具有令人印象深刻的能力的四肢动物:例如猎豹是最快的陆地动物,能够以高达120公里/每小时的速度奔跑。山羊有很强的攀爬和平衡技能,猫非常敏捷,而马匹能够搬运重物。
生物学家广泛研究了他们生物力学的腿部结构和运动能力。这些报告对于多足机器人的设计者来说是很宝贵的资源。它们不仅提供了关于身体和四肢的功能信息,还为关于运动性能的身体质量/尺寸方面的规格建立了一个有用的基础。
对角小跑步态,这使处于对角线的腿合作,在很大的运行速度范围内显示出了良好的能量效率,在每一次跨步中没有显示出明显的倾斜或滚动运动,因此在自然界中十分常见[15]。一个大范围内对四肢动物的研究表明,有可供选择的常见的小跑速度和步幅频率可以通过对动物体重进行相关计算得到[16]。装有机载液压泵的HyQ的预估重量是80千克,可以得到以下前进速度和步幅频率的近似值:
bull;最小小跑步态 1.77米/秒 1.62赫兹
bull;最佳小跑步态 2.88米/秒 1.90赫兹
bull;最大小跑步态 3.97米/秒 2.17赫兹
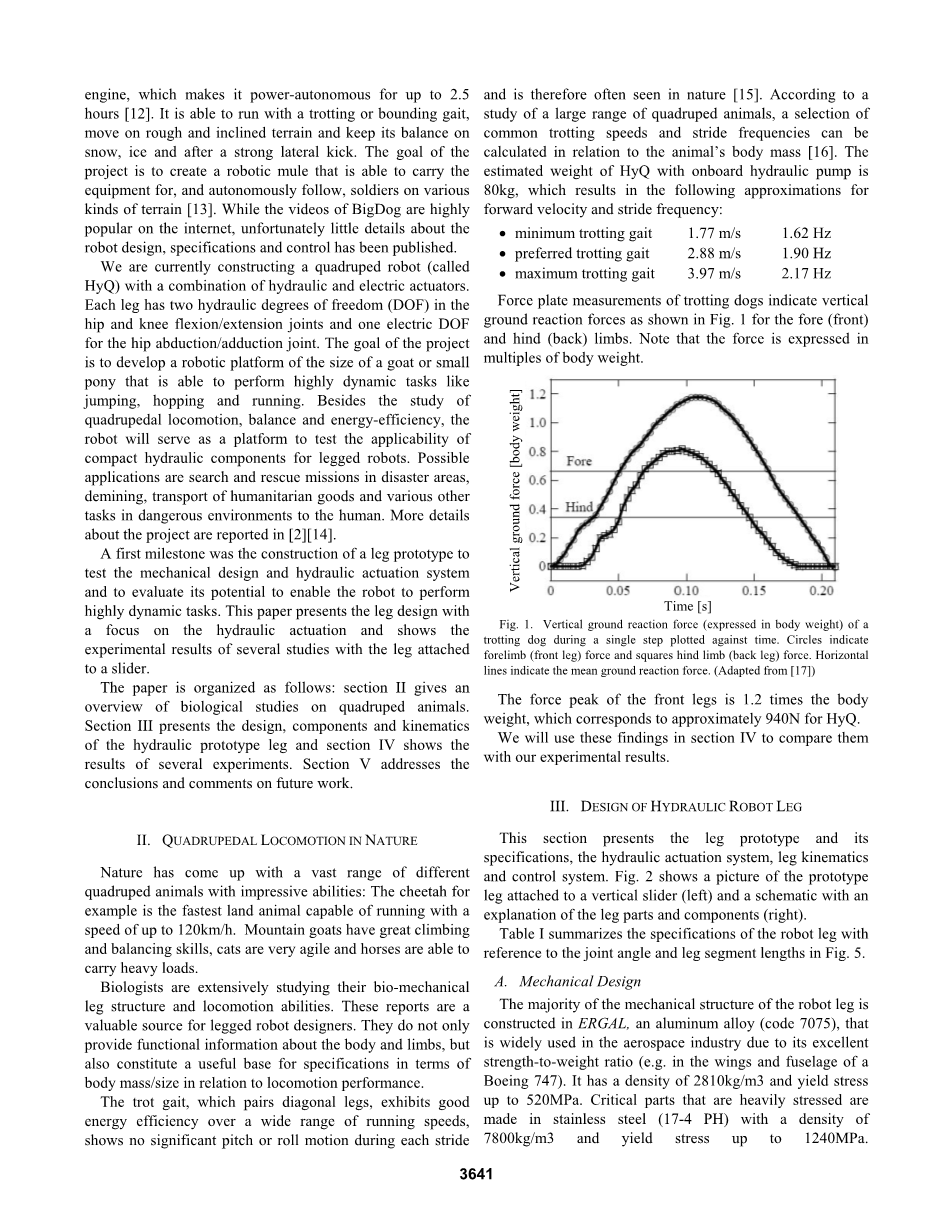
狗在小跑时,测力板测量得到的对前(正面)肢和后(背面)肢的垂直地面的反作用力如图1所示。注意,该力是用体重的倍数表示的。
图1 .小狗奔跑时,每一步垂直于地面的反作用力(用体重表示)相对时间坐标的绘制。圆圈表示前肢(前腿)的力量,方块表示后肢(后腿)的力量。水平线表示的是地面反作用力的平均值。
前腿力的最大值是体重的1.2倍,这对HyQ来说约相当于940N。
我们将在第四节利用这些研究结果,将它们与我们的实验结果进行比较。
III.液压机器人的腿部设计
本节将介绍腿部样机及其规格,液压驱动系统,腿部运动和控制系统。图2展示了连接到一个垂直滑块的腿部样机(左)和对腿部零部件进行解释的示意图(右)。
表I总结了机器人腿部在图五中的关节角度和腿部长度的规格。
A.机械设计
大多数机械腿的机械结构是用ERGAL制作的,ERGAL是一种铝合金(代码7075),由于其优异的强度 - 重量比,它被广泛应用于航空航天工业(例如,波音747的机翼和机身)。它具有2810kg/的密度和高达520Mpa的屈服应力。承受高应力的关键零件都用密度为7800 kg/,屈服强度为1240MPa的不锈钢(17-4 PH)制成。
图2. 图片展示了固定在一个垂直滑块上的二自由度的腿部样机(左),右侧的腿部草图显示了腿部的三部分:臀部装配(1),大腿(2)以及小腿(3),髋关节和膝关节的液压缸(4,5),髋关节和膝关节带有编码器的连接轴(6),载荷单元以及机械脚(8)。
表1
|
机械腿部原型说明书 |
|
|
自由度(DOF) |
2(液压) |
|
臀部关节活动范围(q1) |
|
|
膝关节活动范围(q2) |
|
|
腿部分的长度() |
0.3m |
|
位置传感器 |
2相对编码器 (8000计数/转) |
|
力/扭矩传感器 |
2载荷单元 (最大4440N) |
|
压力传感器 |
4传感器 (最大25MPa) |
|
关节扭矩理论最大值 160巴(伸展) |
125Nm |
|
关节扭矩理论最大值 160巴(压缩) |
77Nm |
|
腿部总质量(髋部装配,大腿,小腿) |
4.4Kg |
|
大腿部分质量(包括膝盖液压缸) |
1.5Kg |
|
小腿部分质量 |
0.8Kg |
腿由三个主要部分组成:臀部装配,大腿和小腿,如图2所示。 腿部利用一个管状结构(臀部装配和小腿)和一对由水平轴相连的平行板,如图3的CAD模型所示。液压缸被安装在腿部平板之间并固定到这些钢轴(直径8毫米)上。管的直径为30mm,厚度为5mm,构成了一个坚固但轻巧的腿部结构。平行板结构在扭转及轴向偏转方面较弱,但允许该气缸被内部收纳。每个关节的两个轴承为腿各部分提供一个坚固而低摩擦的连接。脚是直径为40mm的半球形。它被刚性地连接到小腿,并具有弹性橡胶涂层,以抑制接地时的影响,并在力达到峰值时保护结构。
图3.写有机械设计特征释义的腿部原型的CAD模型
B.液压驱动系统
图4表明了液压系统所有系统组件的解释方案。两个双作用液压缸(Hoerbiger LB6-1610-0080-4M)具有16毫米/10毫米的孔/棒直径和70mm的行程长度。他们的最大允许工作压力为16MPa。气缸室(PA和PB)的内部压力由压力传感器(见3.E.部分)测量。两个成比例的4位管路阀门(Wandfluh WDPFA03-ACB- S5-G24)安装在阀歧管,控制液体流动到阀门。
液压是通过流速为6升/分钟的容积泵连接到一个具有2至21MPa可调压力范围的溢流阀来产生的。如果需要,可由一个0.5升蓄电池提供额外的流量,并减少压力波动。热交换器保持油温恒定在45℃。
C.控制系统和传感器
联合控制采用两个成比例的阀来调节液压流至气缸。这些阀门的电磁阀由连接到运行1kHz控制回路的PC104奔腾板的Sensoray 526多I / O板产生的PWM信号控制。模拟传感器数据由具有16位分辨率的I / O板进行采样。
关节的角度位置由具有80,000计数/转的高分辨率的相关编码器(Avago AEDA-3300BE
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146252],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

