
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于单片机的两相流量传感器电容测量仪
S.Arunkumar,V.Kannan,M.Venkatesan*
萨斯特拉大学机械工程学院,Thanjaur–613401,India*mvenkat@mech.sastra.edu
摘要:针对电容器充放电过程中存在的时间滞后问题,研制了一种基于英特尔8051单片机的电容表。电容值使用LED接口显示。使用通过RS-232接口连接的PC机连续精确地测量两相流传感器。仪器的分辨率为0.0125 pF至1000uf,分辨率为0.0125 pF。该系统测量电容成功,精度为0.5%。
关键词:电容测量仪;微控制器;两相流传感器
产品介绍
两相流在工业和医疗领域有着广泛的应用。两相流的一些工业应用包括石油和天然气工业、发电厂和化学加工工业。需要发展测量技术,以了解存在的空隙率和每相的数量。已经开发出许多使用光学传感器和X射线的方法。但是,使用电容传感器的技术比任何其他测量方法都具有非侵入性和精确性。
贾沃克[1,2]用铜电极测量空隙率。采用相移检测法,Chun和Sung[3]采用高精度LCR测量仪,研究了参数对空隙率测量的影响。艾默生·多斯·瑞斯[4](Emerson Dos Reis)等使用了平行导线技术。测量水平段塞流中的速度。Kendoush[5]等试图提高电容法测量空隙率的精度。Reinecke和Mewes[6]使用多电极电容传感器来可视化瞬态两相流。雨果等人[7]基于电容式传感器信号聚类,绘制了水平制冷剂两相流动图。与其他技术相比,这些检测两相流的方法具有成本效益和非侵入性。文献中提供了各种流体介电常数的标准值。因此,各种流体的空隙率测量可以很容易地进行,与其他方法得到的结果有更大的印证空间。
传统的电容测量方法是基于电桥法。现代方法借助于电子和信息技术领域的进步,Kolle[8]提出了一种同步调制解调技术,用于精确测量电容式传感器。Yang[9]提出了一种电容层析成像(ECT)技术,用于测量多电极电容传感器的电容变化。
Matsumotoet等[10]使用电容直接转换成数字代码,其中被测电容构成模拟-数字转换器的一部分。上述技术的典型缺点是:
(1)传感器读数速度相对较慢(每秒只有几次转换);
(2)读数时间与被测值的依赖性。
Ashokkumaret等[11]和Reventeret等[12]使用了一种利用微控制器利用充电和放电来确定电容的技术。这种设计具有连续测量优于其他技术的优点。可通过串行接口进行连续测量。
在本研究中,我们使用一个模拟-数字转换器与一个基于8051的微控制器连接。在标准电容器的帮助下,验证了测量结果的正确。在Microsoft Excel中对各种电路元件引起的时间滞后进行了分析,并在算法中加入了误差控制功能,提高了算法的精度和精度。
工作原理
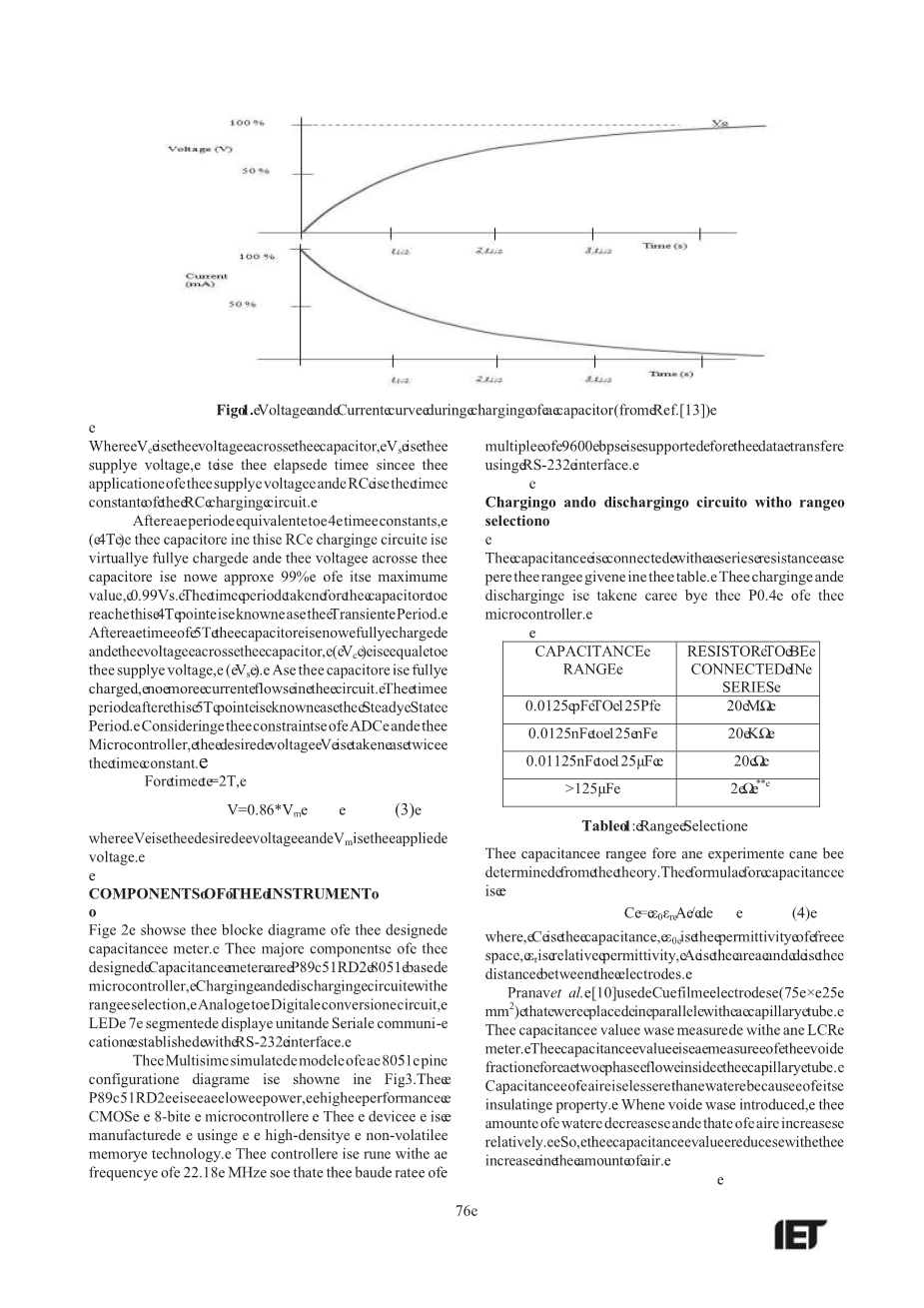
电容器C与低功率和高电阻R串联。在充电过程中,电压呈指数上升,通过模拟-数字转换器(8位)作为信号发送给微控制器。当达到所需值V时,所用时间由微控制器中的计数器电路计算。所用的时间是要确定的电容器值的度量。
从数学上讲,我们可以说电容器充电至一个时间常数(t)所需的时间如下:
(1)
充电期间任何瞬间电容器电压值上的电压如下:
(2)
其中,是电容器上的电压,是电源电压,t是应用电源电压后经过的时间,RC是RC充电电路的时间常数。
经过相当于4个时间常数(4t)的时间后,此RC充电电路中的电容器实际上已完全充电,并且电容器现在约为其最大值的99%,0.99。电容器达到4t点所需的时间称为瞬态时间。5t后,电容器现在充满电,电容器两端的电压()等于电源电压()。当电容器充满电时,电路中不再有电流流动。此5t点之后的时间段称为稳态。考虑到ADC和微控制器的限制,将期望电压V取为时间常数的两倍。
对于时间T=2t,有
(3),
其中V是所需电压,是应用电压。
电容器是一种能够将能量作为电荷存储的电子元件。实际上是一个电容器装置不仅显示电容,而且显示电阻和电感。 等效电路的简化原理图由电容、电感、串联电阻和并联电阻组成。
图1. 电容器充电期间的电压和电流曲线(参考文献[13])
仪器的部件
图2为所设计的电容表的方框图。设计的电容表主要部件为基于P89C51RD28051的单片机、带量程选择的充放电电路、模数转换电路、LED 7分段显示单元和采用RS-232接口建立的串行通信。
8051管脚配置图的多即时模拟模型如图3所示。P89C51RD2是一种低功耗、高性能的CMOS的8位微控制器,该器件采用高密度非易失性存储器技术制造。控制器以22.18兆赫的频率运行,以便使用RS-232接口的数据传输支持9600bps的波特率。
带量程选择的充放电电路
电容按表中给出的范围用串联电阻连接。充电和放电由单片机的p0.4口负责;
实验的电容范围可以从理论上确定,电容的计算公式为:
(4)
其中,C是电容,ε0是自由空间的介电常数,εr是相对介电常数,A是面积,d是电极之间的距离。
表1:范围的选择
|
电容范围 |
串联电阻的大小 |
|
0.0125pF~125pF |
20MOmega; |
|
0.0125nF~125nF |
20KOmega; |
|
0.01125nF~125 |
20Omega; |
|
大于125 |
2Omega; |
Pranavet 等[10]使用与毛细管平行放置的铜膜电极(75times;25 平方毫米)。电容值用LCR测量仪测量。电容值是毛细管内两相流空隙率的测量值。空气的绝缘性能使其电容小于水。当引入空隙时,水的量减少,空气的量相对增加。在电容测量过程中,如本文结果所示,相位角测量的误差在50至80kHz的频率范围内是最低的。通过乘法和除法的数学运算,在较低的频率范围内得到的不确定度在计算中会产生较大的误差。因此,计算的频率范围被缩小到50-80kHz。因此,电容值随空气量的增加而减小。
根据Pranavet等测量,两相流中各种空隙率的电容在图4中的50pF范围内,因此串联电阻R可从表1中取为20MOmega;。随着气泡体积的增加,在电容值作为空气的介电常数小于水的介电常数。当引入空隙时,水的量减少,空气的量相对增加。因此,电容值可能会降低到费米法拉兹的值。所设计的仪器能有效地测量如此低的值。
模数转换电路
ADC0804是一个8位模数转换器的例子。8位模数转换器的引脚配置图如图5所示。电压到8位二进制转换的协议是按照以下计算,以5伏为参考电压,范围为0-5伏。
对于8位转换器,最大范围=(0-2的8次方),因此最小计数=电压范围/设备范围等于5/256=19.5 mV,因此,在ADC 4.3/19.5中所需的值=220(近似值),然后该ADC的二进制值为1101 1100。将该输入值与mu;C针脚1处的输入值进行比较。由于模拟和串行传输中的限制,该方法可以消除这些系统限制。该方法可以很好地用于任何涉及微控制器和电容传感器的控制系统的建模,以提高系统的精度。
串行通信(RS-232)
RS-232是最广泛使用的串行I/O接口标准。它的输入和输出电压电平与TTL不兼容。PC机和微控制器之间的连接至少需要三个插脚。8051有两个专门用于串行传输接收数据。这两个管脚称为TxD和RxD,是Port3组(P3.0和P3.1)的一部分。Xtall频率为22.184MHz,波特率为19200 bps。
图2. 该模块的系统组成
微控制器(单片机)与时间电路
图3. 8051单片机
图4. 两相流中各种空隙率的相对电容(参考文献[13])
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
图5. 模数转换器
7分段LED显示屏
七个分段的LED接口显示如图6所示。七个LED由微控制器中为输出配置的端口供电。4个显示器由4个不同的插脚控制。这种展示是基于人类眼睛中视觉的持久性原理。前3个显示显示的是整数值,最后一个显示的是十进制数值。
图6. LED七段的显示器
仪器的具体操作
根据图7中的顺序,该仪器设计用于简化传感器电容测量中涉及的工作。用户必须从表1中选择合适的电阻。当电路由外部电源接通时,电容器开始充电,由微控制器建立。信号由微控制器处理。根据图中讨论的算法进行处理
算法设计
用于对微控制器进行编程以按正确顺序运行操作的算法如图8所示。与充电部分相对应的引脚被初始设置为低,用于电容器的放电。引脚被设置为高。端口1被配置为连接到ADC的输入端口。ADC与微控制器交替设置为高和低,以获得处理输入的结果,并将该值进行比较,直到达到二进制值11011100,这表示时间t达到时间常数值的两倍。然后利用式1和式2完成对电容的转换。然后在单片机中加入误差函数,提高了精度。
最后显示输出,并在引脚Txd和Rxd的帮助下串行发送。
图7. 操作顺序流程
图8. 算法的框图及其流程步骤
设计的仿真与误差分析
根据图9所示的电路,对上述硬件设置的理论模型进行了多点仿真建模。读数的间隔为0.5,1,10单位,适用于前一节中规定的每个范围。计算XTAL=22MHz和ADC的延时误差。对于所取的xtal值,采用简单的一元法计算误差。在Microsoft Excel中记录了作为电容函数的误差,绘制了曲线图,得到了函数f。在使用Kiel C编译器对微控制器进行编程时,函数f作为公差/错误函数包含在内。与之前讨论过的各种文献中提出的模型相比,误差分析提高了精度。
误差及其精度分析
用各种标准值电容器对仪器进行测试,所得值作为标准值的函数绘制在Excel中。借助于Microsoft Excel中可用的近似技术,将图的方程作为一个多项式得到,得到的函数值为。在算法中加入误差函数,提高了算法的精度。所涉及的时间延迟导致的错误。误差函数是从Microsoft Excel中获得的整组数值的多项式函数。误差函数基于二次多项式回归。每个实际系统的误差函数可能不同。因此,必须对单个仪器进行误差分析基于以上原因,在测量过程中可以采用多次测量求平均值的方法提高测量精度。
在各种系统组件中,例如ADC模块的放大器,由于模拟和串行传输中的限制,该方法可以消除这些系统限制。该方法可以很好地用于任何涉及微控制器和电容传感器的控制系统的建模,以提高系统的精度。
误差分析的范围分为3个。图10显示了极低范围电容实际读数的变化。低值电容器的误差小于高值电容器的误差。图11说明了1pf至100 pf范围内电容值的变化情况。为测试目的,测量了已知值的电阻、电容器和电感的大小和相位角。用同样的部件也用于对开发的 LCR 仪表进行测试。
如图12所示。误差函数基于二次多项式回归。每个实际系统的误差函数可能不同。因此,必须对单个仪器进行误差分析。
图9. Multisim 仿真
图10. 读数0.0125 pF至1pF范围内的变化 图11.读数在1 pF至100pF范围内的变化
图12. 误差函数图像
图11说明了1pf至100 pf范围内电容值的变化情况。为测试目的,测量了已知值的电阻、电容器和电感的大小和相位角。 用同样的部件也用于对开发的 LCR仪表进行测试。 在这两种情况下, 频对5至100 kHz的频带进行了频率扫描, 并在下面的文本中给出了结果并呈现出来了在使用Kiel C编译器对微控制器进行编程时,函数f作为公差/错误函数包含在内。与之前讨论过的各种文献中提出的模型相比,误差分析提高了精度。误差函数是Microsoft Excel中获得的整组数值的多项式函数。如图12所示。误差函数基于二次多项式回归。每个实际系统的误差函数可能不同。因此,必须对单个仪器进行误差分析。
结果与结论
在实验中加入误差函数后得到的结果与先前的电阻标准值结果
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18532],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

