
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
使用直接数字频率合成器用于多频率超声波测距的一项研究
Ke-Nung Huanga,lowast;, Yu-Pei Huangb
a电子工程系,艺术大学,台湾高雄,840
b电气工程系,国立成功大学,台湾台南市701
摘要
本文提出了一种用于多频率超声波测距(MFCW)的改进算法,这种方法可以通过相位差检测的方式来实现对目标距离的高分辨率测量,因此它避免了传统测量方法的声学衰减问题。以前使用分频器算法为MFCW生成所需的多个频率,然而,分频器算法受到低频分辨率的限制,从而导致MFCW的测量范围和频移问题也受到限制。本研究提出了直接数字频率合成器(DDFS)算法,用于准确生成MFCW测量距离的多个频率,DDFS的优点包括快速切换时间,顺畅的频率转换和具有确定的频率波长。此外,DDFS算法可以轻松地编程到复杂的可编程逻辑器件(CPLD)和其他微处理器中,这些装置通常用于超声波测量距离当中。实验结果表明,当测量范围从50mm到3000mm时,通过温度和湿度补偿,距离测量的组合标准误差大致为0.26 mm,此外,该算法还具有应用范围广的特点,例如可以容易地适用于其它各种微处理器中。这种距离测量的具有精度高,范围扩大,易于实施等优点。
关键词:超声波测距、传播时间、直接数字频率合成器、不确定性、微处理器
1.介绍
近年的文献已经对超声波测量距离的方法进行了广泛的讨论。目前,传播时间(TOF)技术(脉冲回波法)是主要的测量方式。 TOF技术基于计算超声波从发射机到接收机的过程所需的时间,得出发射机到接收机之间的距离d(d = ctimes;TF),其中c是声速,TF是飞行时间[1]。当使用TOF技术测量距离时,系统误差主要有声音的速度变化,振幅延迟惯性现象和接收信号的振幅衰减[2-4]。替代TOF技术测量距离的是相移法(PSM), PSM通过计算发射和接收的连续波之间的相位差来评估距离。与TOF相比,PSM更准确,克服了传统的声衰减问题[5]。使用PSM,距离可以通过单频的相移计算得出,然而,使用PSM时,如果最大距离超过全波长,则会发生相位模糊的情况[6]。在空气测量应用中通常使用的超声波换能器具有40kHz的谐振频率。因此,使用超声波换能器的PSM的最大可实现范围为约8.5mm,其对应于340m / s的声波速度,对于距离测量应用,该范围通常太短。解决这个问题的一个方案是使用幅度调制(AM)技术, AM技术涉及使用若干低频来调制谐振频率,然后通过谐振频率作为载波频率,最后,测量接收到的信号包络相移以计算目标的距离[7]。另一种解决方案结合了互相关TOF方法和PSM[8],然而,这种方法的精度受样本幅度精度和模数(A / D)转换器分辨率的限制。韦伯斯特提出了一种基于二进制频移键控(BFSK)算法的方法[2],该方法减少了与超声换能器的非理想行为相关联的许多问题,但是,BFSK方法却容易受到噪声的影响。
为了测量目标距离,比较三种不同频率的相移(f1 = 40kHz,f2 = 40.2kHz,f3 = 42kHz)[5,9,10]。由f1和f2(f = 200Hz)之间的频率差确定的最大范围为约1.7m,其对应于340m / s的声波速度。 f1和f3(f = 2 kHz)之间的较高频率差用于实现更精细的分辨率和0.175 m的测量范围,通过使用16 MHz时钟计算40 kHz时钟相移,可获得最高分辨率,即0.25%,这种多频连续波(MFCW)方法可以在远大于一个波长的范围内评估高分辨率目标距离[5,9]。另外,通过计数技术来计算相移,避免了A / D转换器的有限位限制。然而,该方法的最大范围和分辨率取决于频率差f,该系统使用微处理器控制的分频器将基本16 MHz频率分为40 kHz,40.2 kHz和42 kHz三种不同的频率。在这些频率中,最小f为200Hz,因而,该方法的最大范围限制在约1.7米。此外,额外的误差是由频率不可避免的频移引起的[5]。
为了提高超声波距离的测量精度和范围,本研究提出了一种改进的MFCW算法,它使用直接数字频率合成器(DDFS)算法精确生成多个频率。 DDFS技术对于以极精确的分辨率和快速切换速度产生频率非常有用[11-13],DDFS的替代方案是模拟锁相逻辑(PLL)技术,然而,PLL通常具有小于一个八度的工作频率范围[11]。最常见的DDFS架构是Tierney,Rader,Gold,架构[12],DDFS系统将数字频率设置字转换为模拟频率,当设定字非常宽时,可以产生大量的频率。 DDFS系统的优点包括快速切换时间,顺滑的频率转换和精准的频率长度。此外,DDFS算法易于编程到复杂的可编程逻辑器件(CPLD)和其他微处理器中[5,9,14],这些类型的微处理器通常用于超声波距离测量。因此,作为广泛接受的多频发生器,DDFS可以提高MFCW超声波距离测量性能。
2.方法
2.1 DDFS
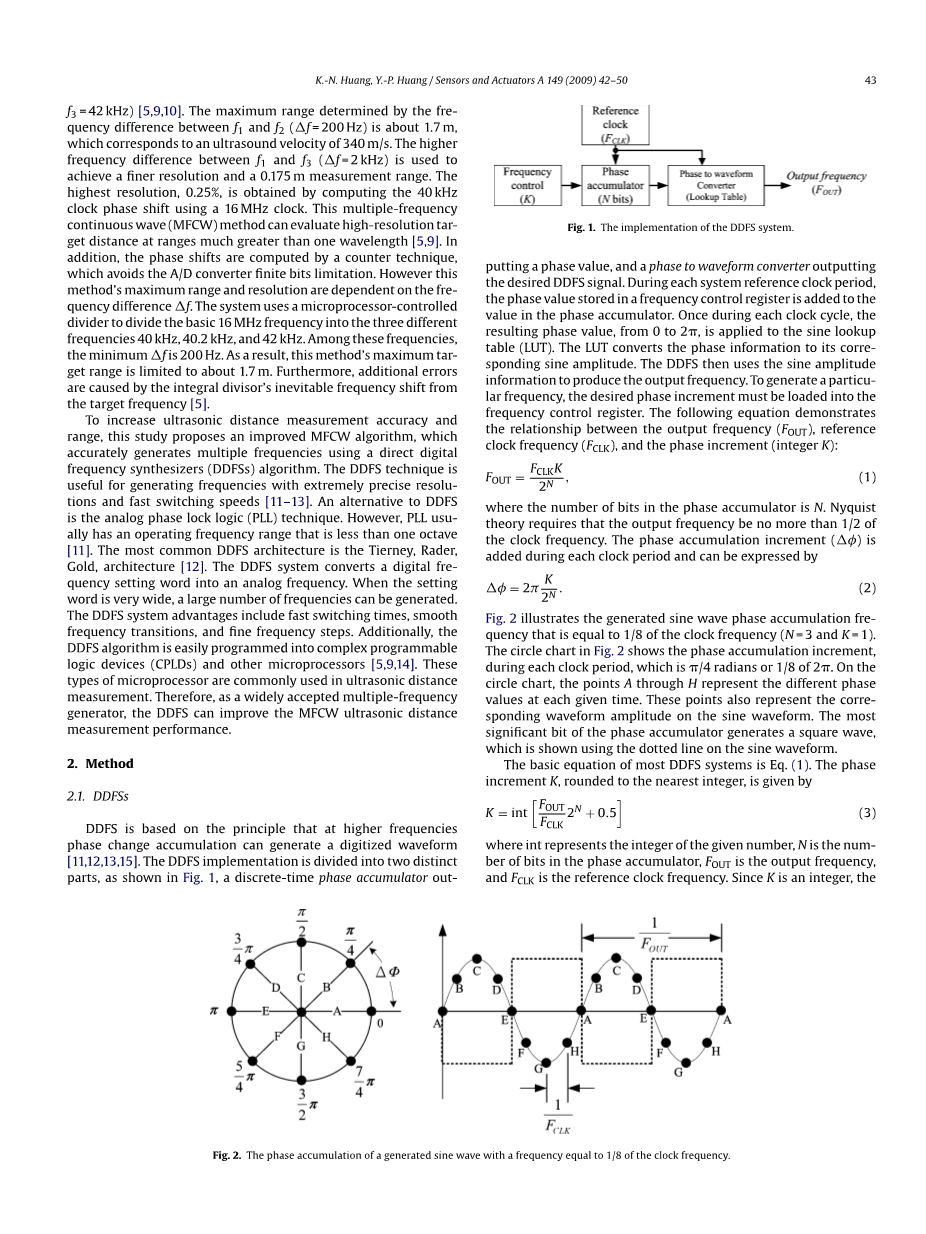
DDFS基于这样的原则:在较高频率下,相变积累可以产生数字化波形[11-13,15]。 DDFS分为两个不同的部分实现,如图1所示。
图1.执行DDFS系统
图2.产生正弦波的相位累积,频率等于时钟频率的1/8。
离散时间相位累加器输出相位值,以及输出期望的DDFS信号的相位到波形转换器。在每个系统参考时钟周期期间,存储在频率控制寄存器中的相位值被加到相位累加器中的值。在每个时钟周期内,一旦从0到2的结果相位值被施加到正弦查找表(LUT), LUT将相位信息转换为对应的正弦幅度,然后DDFS使用正弦幅度信息来产生输出频率。为了产生特定频率,所需的相位增量必须加载到频率控制寄存器中。以下公式说明了输出频率(FOUT)、参考时钟频率(FCLK)和相位增量(整数K)之间的关系:
其中相位累加器中的位数为N.奈奎斯特理论要求输出频率不超过时钟频率的1/2,相位累加增量在每个时钟周期内相加,可以表示为
图2示出了等于时钟频率的1/8(N = 3和K = 1)的所产生的正弦波相位累积频率,在每个时钟周期期间的相位累积增量,其为/ 4弧度或2的1/8。 在圆形图中,点A至H表示每个给定时间的不同相位值, 这些点也表示正弦波形上相应的波形幅度。 相位累加器的最高有效位产生一个方波,使用正弦波形上的虚线表示。
大多数DDFS系统的基本方程是公式 (1)。 代入到最接近的整数的相位增量K由下式给出
其中int表示给定数字的整数,N是相位累加器中的位数,FOUT是输出频率,FCLK是参考时钟频率。由于K是一个整数,其中int表示给定数字的整数。如果正在使用具有40 MHz系统时钟频率的32位相位累加器,则系统的最小输出频率调节步长(分辨率)将等于约0.0093 Hz。此外,DDFS不会与由积分因子引起的目标频率的偏移相关联的错误。
输出频率的最小调谐步长(Delta;FOUT)可从公式 (1)推导出:
根据式 (4)中,Delta;FOUT表示相位累加器(N)中的位数与期望的最小输出频率调谐步之间的关系。
其中int表示给定数字的整数, 如果正在使用具有40MHz系统时钟频率的32位相位累加器,则系统的最小输出频率调谐步长(分辨率)将等于约0.0093Hz。 此外,DDFS不会产生与偏移相关联的错误。
2.2 MFCW
超声距离测量MFCW算法是一种基于Huang和Tsai等人[9]的双频连续波(TFCW)方法 [5]。 TFCW方法由两个不同的连续波频率(f1和f2)组成,它们从超声波换能器顺序传输,发送信号1和接收信号2的各个相移由数字化相位信息计算。发射机和接收机之间的目标距离d可以表示为
这里1和2是超声信号相对于频率f1和f2的波长,n1和n2是整数,Acirc;1和Acirc;2是相移。 相移差(Acirc;)的公式可以从公式 (6)和(7)如下:
方程式中的整数n1和n2 (6)和(7)只有两个可能的值:n1 = n2和n2 = n1 1。因此,相移差(Acirc;)可以使用以下算法表示:
如果超声速度c是恒定的,则波长1和2可以被确定为:1 = c / f1和2 = c / f2。 这里,f1和f2是超声波频率。 从等式 (8),目标距离d可以表示为:
因此,如果目标距离不超过由两个频率(f)之间的差异引起的限制,则可以使用相移差(Acirc;)来确定目标距离。 另外,如果目标距离超过两个频率之间的差值(f)设置的限制,则会发生相位模糊。 因此,TFCW最大可实现的范围取决于频率差(f)。
如图3. 通过fc/f1, c/f2 和 c/f1.的相移量可以看出目标向量
比较发送和接收的信号, 相移Acirc;1和Acirc;2被比较并得出Acirc;1、 信号频率f 1和f 2也被比较并得出f1的频率差。 最后,相移是通过比较发送和接收的信号产生的, Acirc;1和Acirc;3比较得出Acirc;2。 信号频率f1和f3也进行了比较,得出了频率差f1。 测量的目标距离可以通过使用以下算法来表达:
其中int表示给定数字的整数。
大多数商用超声波换能器具有40plusmn;2kHz的窄带宽,由于这种带宽限制,大多数以前的研究分别选择了40kHz,40.2kHz和42kHz的频率f1,f2和f3 [5]。 选择三个特定频率以便于使用时钟振荡器。该系统将振荡器频率分为三个不同的频率,最小频率差为200Hz,作为这种最小频率限制的结果,该方法的最大目标范围非常有限。此外,由积分因子产生的频率不可避免地将经历来自目标频率的变化,导致额外的错误。
为了提高准确度和目标范围,本研究采用DDFS作为频率发生器。选择的三个频率
f1,f2和f3分别为40kHz,40.1kHz和42kHz。 图3说明了如何确定新的最大范围,因此,
我们可以从c / f1导出最大目标距离。 f1和f2之间的频率差为100Hz,对应于大约3.4米的最大目标范围和超声波速度约为340 m / s,然后使用f1和f3(f2 = 2kHz)之间的较高频率差以更精细的分辨率(c / f2 = 0.17m)测量目标距离。 使用40MHz时钟进行40 kHz信号的相位计数,可以获得0.1%的最大分辨率, 因此,d可以通过公式 (10)计算出目标距离。
方程式 (10)表明,可以从多频相移和声速获得估计的目标距离。 然而,在空气中,声速c随温度和湿度而变化。 当在恒定压力和理想气体中,声速c由[16,17]给出:
其中,R,T和M分别是比热比,通用气体常数,绝对温度(开尔文)和摩尔质量, 方程式 (11)表明声速与绝对温度的平方根成正比。如果忽略湿度变量,声速(ct)将随绝对温度的平方根增加而成比例地增加。在0℃和1atm(760mmHg),0.03mol%二氧化碳下,声速c普遍接受的值为331.45plusmn;0.05m / s [4]。 下面的公式表示方程式的单位从开尔文到摄氏度转换,结合普遍接受的声速c,并忽略湿度值,得出:
如上所述,(12)忽略湿度影响,因此仅适用于干燥空气条件。 为了解决湿度影响,公式需要更正,在相对湿度h和温度t的范围内的声速比的近似方程式是[16]:
其中ch和c0分别是相对湿度h和干燥空气的声速。 因此,方程式(12)和(13)可用于通过温度和湿度补偿来计算声速。
3.系统实现
3.1硬件
系统的硬件实现如图4所示。超声波传输信号由CPLD(FLEX10K10,Altera公司,美国)以数字格式生成。 CPLD信号的电压电平为 3.3V,发射机电路由电平移位电路和输出放大器(美国国家半导体公司的CD4069)组成,输出放大器CD4069的设定电压电平为 12V。因此,增加了一个电平移位电路,将发射机的信号从 3.3V移动到 12V。电平移位电路由缓冲器(CD4050,National Semiconductor ,USA)和开放集电缓冲液(74HC07,ST Microelectron-ics,USA)。超声波发射器/接收器(400ST160 / 400SR160,Pro-Wave Electronics Corporation,Taiwan)被规定为具有55°的光束角,40kHz的中心频率和2kHz的带宽。接收灵敏度在40 kHz(0 dB = 1 V / bar)时规定为-60 dB。接收器电路有两个主要组件,前置放大器(uA741,Texas Instruments,USA)和零交叉电路。过零电路由差分比较器(LM393,Texas Instruments,USA),四个电阻(R6-R9)和电容(C3)组成。 R6-R8电阻改变差分比较器输入的直流偏置电压,因此,LM393反相和反相输入的直流偏置电压几乎相同。此外,差分比较器将接收到的信号从正弦波转换成方波。最后,平方输出信号由CPLD采样。
CPLD测量系统配有发射机信号发生器和相移量计数器,因此,CPLD可用于控制整个系统的运行并计算相移。图5显示了CPLD内编程电路的框图,为了产生三种不同的频率(40 kHz,4
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25857],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

