
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
使用对称性推导分析和主动学习进行车辆多部件检测
摘要:在汽车主动安全检测系统中,行车车辆检测是一个决定性操作。此安全检测系统包括:碰撞避免,合道协助和车道改变辅助等。在这篇论文中,我们提出了使用主动学习和对称分析的VeDAS车辆检测方法。VeDAS是一种基于多部分的车辆检测算法,主要运用类Haar特征和AdaBoost分类器进行车辆尾部的检测。为了训练分类器,我们提出了一种改进的主动学习框架。在此框架内自动选择积极和消极的多部件样本。此外,我们利用一种最新的迭代窗口搜索算法和基于对称性的回归模型与分类器的被检测部分相关联的方法去提取完全可视的车辆。我们在七种不同条件下的数据库中对我们的方法进行评估。详细评估显示我们这种方法进行车辆检测的正确率超过了95%,我们的方法要比最新的各种方法表现的更加优越。此外,VeDAS还能在完全可见的车辆检测后对部分可见的车辆进行检测。在一个新的部分可见车辆检测数据库中,VeDAS的正确率达到了87%。
关键词:车辆检测,主动安全,驾驶辅助,智能汽车。
1 介绍
据了解,在车辆碰撞的交通事故中[1][2],追尾事故超过了29%。在行驶过程中对前方车辆进行检测可以大幅的减少这类追尾事故的发生。现在,虽然我们可以从很多商业广告中找到使用主动式传感器的车辆检测装置,但是由于主动式传感器在多重障碍下检测具有局限性,所以越来越多的基于视觉的车辆检测装置被使用。
使用车载单目摄像头进行车辆检测仍然被认为是一个具有挑战性的研究[3]。因为,我们往往要求检测的车辆在影子,建筑物和栏杆等运动或静止背景下仍然具有鲁棒性,而单目摄像头处理这类问题是具有一定难度的。一定数量的使用单目摄像头的车辆检测技术已经被提出,尤其是对行车情况下的车辆进行检测[4]-[8]。在行车情况下的车辆检测系统中,摄像头被安装在自己的车辆中而不是被安装在类似交通监控系统的装置上[9]。更多关于使用单目摄像头进行车辆检测的研究可以在文献[3]中获得。根据是否使用了运动目标或者外观我们可以对这些文章进行很好的分类。基于外观的技术主要使用的是方向梯度直方图(HOG),SURF和类Harr特征等。然后使用分类器对特征进行分类。例如,支持向量机(SVMs),AdaBoost等。而且,领域结构信息例如线路也被使用来提高车辆跟踪的正确性和鲁棒性。此外,我们可以使用诸如主动学习[6]的新方法来提高车辆检测的鲁棒性。类似地,基于动态的技术诸如[22][23],使用动作线索来对车辆进行检测。本篇论文使用的是基于外观的方法,文章的其余部分也主要关注这些工作。
尽管一个基于视觉的车辆检测方法已经被发现,但是由于使用的是单目摄像头,所以在车辆鲁邦检测中仍然存在很多问题。首先,车辆检测中的低错误率以及可接受的真实检测率仍然是一个具有挑战性的问题。其次,大多数已经存在的诸如[4][6][10]等方法都是对完全可见的车辆进行检测,也就是说,在车辆的前方或者后方整个可见部分在输入的图形帧中都是可视的。然而,对于部分可见的车辆的检测[5][8][16][23]在最近才被研究。
在这篇文章中,我们提出一种最新的多部分车辆检测技术来检测车辆,包括了完全可见和部分可见车辆的检测。提出的技术包含了两个阶段。在第一阶段,一个车辆后视的两个部分我们使用类Harr特征进行检测和AdaBoost串联分类器进行分类。为了训练分类器,我们扩展了[6]中提到的主动学习框架进行车辆检测。在第二阶段,我们使用一个迭代窗口搜索算法和对称回归模型对完全可见的车辆进行检测。对提出的方法进一步扩展可以利用由几个部分组成的检测来对部分可见车辆进行检测。我们把提出的方法称为VeDAS,它是Vehicle Detection using Active learning and Symmetry的首字母的缩写。值得注意的是,在提到的基于外观的车辆检测方法[6][13][18]中,VeDAS是为车辆检测特别设计和最具优越性的。
这篇文章的组织结构由以下几部分组成。在第二部分中,我们研究最近关于行车车辆检测的方法和提出了我们方法所适用的范围。第三部分中,我们介绍了提到的主动学习框架。在第四部分中,对运用VeDAS进行完全可见车辆的检测进行了描述。第五部分中,VeDAS被进一步的扩展来进行部分可见车辆的检测。在第六部分中,我们对我们的方法进行了详细的评估和展现了我们的方法与其他方法的比较结果。第七部分,我们对整个文章进行了总结。
2 相关工作和范围
车辆检测根本上是计算机视觉领域内的目标检测工作。尽管有大量不同的特征和分类器用于目标检测[24][25],但是我们把我们这篇文章所用到的方法限制在车辆检测中。而且,对于行车中的车辆检测,已经探索了许多运用不同特征与分类器结合的方法[3],这些方法包括基于外观和动作的检测方法[4][6][16][18]和基于3D立体视觉技术的检测方法。在这一章节中,我们主要研究最近出现的工作,例如[2][4]-[8][11][15][16][18][19]。他们主要运用单目摄像头来对行车中车辆的整个可视部分或者局部可视部分进行检测。
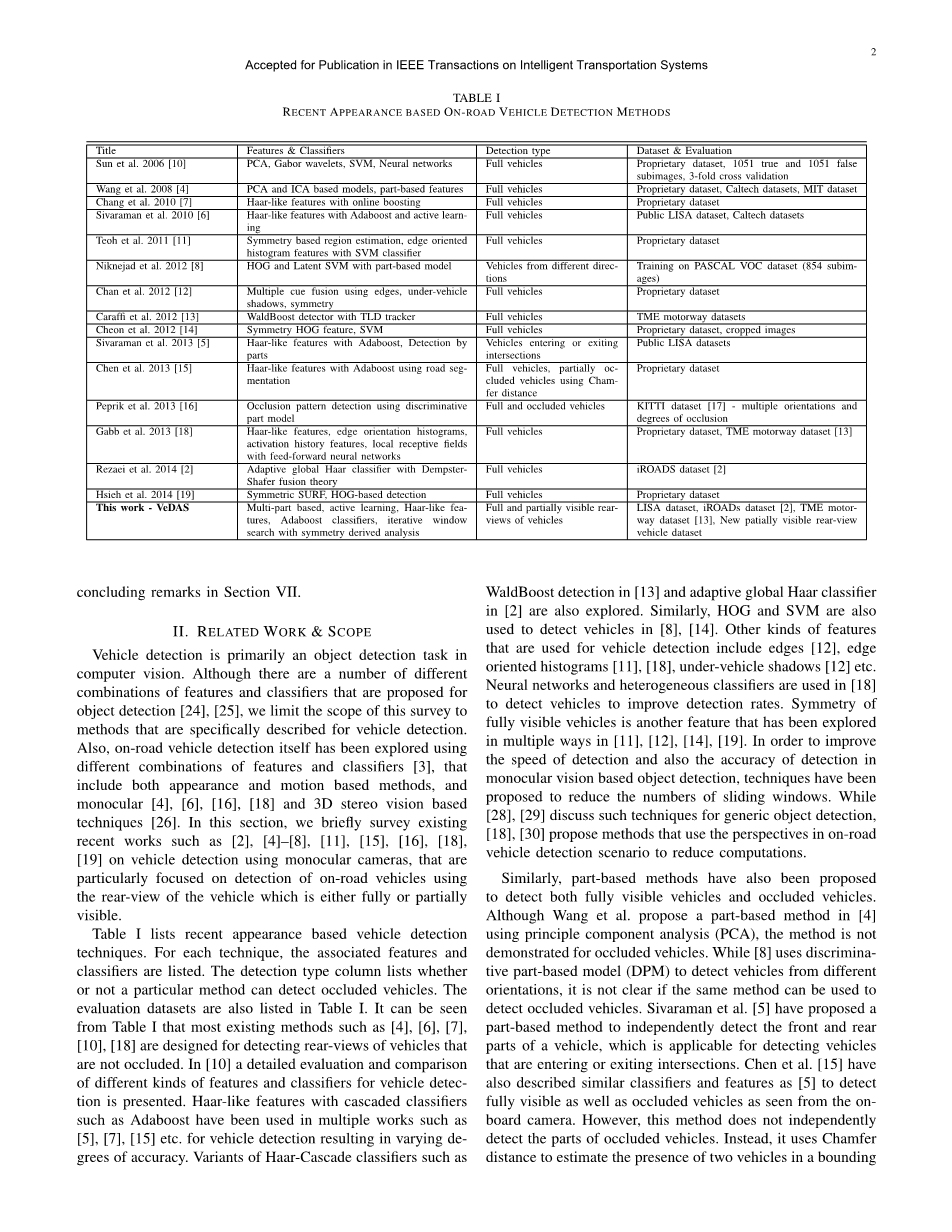
表1列出了近来基于外观的车辆检测技术。对于每个技术,与它相关的特征和分类器已经被列出。在检测类型那一列中列出了此种方法是否能够检测遮挡的车辆。所用到的评估数据库也被列在了表1中。从表1中我们可以看出已经存在的方法如[4][6][7][10][18]检测的主要是未被遮挡的车辆的后视部分。在[10]中关于运用不同特征和分类器进行车辆检测的一个详细评估和比较被叙述。运用串联分类器例如AdaBoost分类器对类Harr特征进行分类进行车辆检测已经在多个文章中被使用,像[5][7][15]等,这些方法在检测的正确率上有所不同。改进的Harr-Cascade分类器例如文献[13]中的WaldBoost检测和文献[2]中的适应性全局Harr分类器已经被研究。类似的,HOG和SVM在[8][14]中也被运用到车辆检测中。其他的诸如边缘[12],边缘方向直方图[11][18],车辆阴影[12]等特征也被运用到车辆检测中。在文献[18]中,神经网络和异构分类器也被运用到车辆检测中来提高车辆的检测正确率。在[11][12][14][19]中完全可视车辆具有对称性这一特征也被运用到车辆检测中。为了提高在单眼视觉情况下目标检测的速度和检测正确性,各种方法已经被提出来减少滑动窗口的数量。然而在文献[28][29]中,讨论了一般对象的检测情况,[18][30]中提出了在行车过程中使用视角这一方案来对车辆进行检测以此来减少计算量。
类似地,基于局部的方法也被提出用于检测完全可见的车辆和被遮挡的车辆。尽管王等人在文献[4]中提出了一种使用PCA的基于局部的车辆检测方法,但是这种方法不适用于受到遮挡的车辆检测中。在文献[8]中,提出从不同的方向使用基于局部的可判别模型来检测车辆,但是它在是否可以使用相同的方法来对受到遮挡的车辆进行检测方面还是不清楚的。在文献[5]中,Sivaraman等人已经提出一种基于局部的方法可以独立的检测车辆的前方和后方部分,它可以被运用到在车辆进出十字路口情况下的车辆检测工作。在文献[15]中,陈等人已经描述了类似于文献[5]中所提到的分类器和特征,运用车载摄像头,不但能够检测整个可见的车辆还能检测受到遮挡的车辆。但是,这种方法不能独立的检测受遮挡车辆的局部外观。然而,它可以在一个边框内使用倒角距离估计两个车辆的存在情况。我们可以从文献[15]中了解到最近关于受遮挡的车辆的检测工作,在这篇文章中,使用一种改进的基于局部的可判别模型将遮挡部分分为单个或双个的遮挡。在文献[17]中,我们在KITTI数据库中对此种方法进行了评估。
表1 最近的基于外观的行驶中的车辆检测方法
2.1提出方案的适用范围
车辆检测是一个被广泛讨论的议题,许多不同类型的研究问题已经得到解答。因此在展示这篇文章的贡献前,我们明确定义了我们所提出的VeDAS方法所适用的范围。在这篇文章中,提出一种基于多重部分的方法的方法,该方法是专门用于车辆尾部的检测。类似于文献[2][6][13],这篇文章主要关注于对象的类别,而没有提出诸如文献[17][37][38]中所讲的不同方向和不同遮挡程度下的车辆检测。因此,这篇文章在类似于文献[2][6][13]中所提到的高速公路数据库中加以评估。相同的理由,在文献[17]中提到的KITTI车辆数据库也不适合作为本实验的评估数据库。此外,在这种情况下关于受到遮挡的车辆检测问题,在这篇文章中受到遮挡的车辆尾部还有可见的部分,不像在KITTI数据库中被定义的一般遮挡情况。图1显示了一些车辆的尾部样本,这些样本满足这篇文章的适用范围。更多关于车辆尾部可见度的详细叙述将在下一章节中加以阐述。
图1 运用VeDAS进行车辆的检测:整个可见车辆用绿框表示,部分可见车辆用红框表示
3 在VeDAS中运用主动学习来训练多重部分车辆分类器
VeDAS的第一阶段涉及使用Harr-AdaBoost串联分类器进行车辆多部分的检测。为了训练串联分类器,在文献[6]中提到的主动学习方法被加以扩展并运用到本篇论文中。
3.1主动学习
主动学习被定义为一种学习方式,这个学习过程控制着它所训练的用来输入的数据。它的目的正如文献[32][33]所述在于为训练分类器进行有选择的输入查询。对于训练分类器经过主动学习的训练样本要比随机样本更具有判别性[6][33][34]。对于给定的包含m个训练样本的数据集,存在一个不确定的范围,在这个范围内使用已经训练好的分类器对个样本进行分类是含糊不清的。因此,再次被训练的分类器为了提高它的表现可能会进行错误的分类。主动学习包含两个步骤。第一步,我们称它为被动学习,手动解释的积极样本和随机消极样本被用来训练分类器。第二步,来自输出的正确的和错误的积极样本被手动的进行查询。在测试图像中,这些输出样本被被动的应用到分类器训练中。这种整个半监督的学习机制被称为主动学习框架[31][33].在文献[6]主动学习被第一次运用到车辆识别中。主动学习框架主要用来在减少车辆识别中的错误检测率的同时,保持高的检测正确率。
图2 使用AdaBoost分类器和类Haar特征通过主动学习来训练两个部分
3.2 VeDAS中的主动学习框架
VeDAS的第一个阶段是对车辆部分提取可能的候选者。为了达到这一目的,我们运用类Harr特征和AdaBoost串联分类器加以实行。图2显示了主动学习的两个步骤。第一轮包括训练两个AdaBoost分类器来对车辆尾部的两个类Haar特征和进行分类。如图3中a图所示,从自己车辆中的车载摄像头显示不同视角的两辆不同的车辆被分为两个不同的部分。消极样本从图像中随机的产生,在这些样本中不包含任何车辆。训练域的两个分类器和对应车辆的两个部分和,其中的下标1表示第一步的分类器。在文献[6][33]中,学习的第一阶段被称为被动学习阶段。如图2的顶部所示。
在学习的第二步中,如图2中底部区域所示,我们再次训练AdaBoost串联分类器,为了更加的了解和选择积极和消极样本。为了达到这一目的,我们对第一步中的训练图像集采用多尺度滑动窗口方法来生成类Haar特征,然后使用第一步中的分类器和对其分类。应该注意的是,在第二步学习过程中,整个训练图像而不仅仅是先前加以说明的窗口都被用来进行分类。在两个窗口集和内的分类结果分别对应两个部分和。然后将窗口过滤为真积极样本和假积极样本。我们定义一个窗口与训练输入图像的重叠部分超过95%为真积极样本(TP)。图3(b)显示在第二步学习后运用和所提取到的积极样本中的一些真积极样本。
- (b)
图3 (a)训练输入图像时给和手动注释窗口,(b)通过分类器检测的窗口为蓝色为橙色,这些数据将在第二轮中被使用
类似地,我们定义一个窗口与已经被注释的窗口的重叠率少于30%的为假积极样本(FP)。值得注意的是被挑选出的假积极窗口一般出现在典型的车载车辆检测中,而不像消极样本在第一步学习中认为的那样不包含车辆那么简单。比如,我们称带有背景,人行横道和公交车的积极样本为假积极样本。这些也将被分类器和视作为车辆的一部分。下面是我们选择重叠率少于30%的样本为FP窗口的一些理由。我们考虑在真实的地面情况下50%的重叠率可能就为最终的积极检测,所以把30%或者更少的重叠率作为FP窗口是一个保守的行为,为了在学习框架下获得有效的消极样本来训练分类器。此外,第一步中的分类器和是使用10000个积极训练样本训练的20级分类器。这些样本来自于自己车辆从不同视角所捕捉到的其他车辆尾部所组成的样本。
然后我们从积极和消极窗口中提取类Harr特征,并将其用来训练两个AdaBoost串联分类器和。这些分类器被用来生成两个部分和,这两个部分将在VeDAS的第二步中加以处理。
接下来的目标将在提到的积极学习框架中得以体现。首先,学习的第二轮将是自动的,它不像文献[6]中所提到的那样,它是自动的为学习的第二步选择积极和消极的窗口。其次,生成一组更为清楚的消极样本集来训练分类器。这一步骤与[6]是相似的,但是在这篇文章中消极样本将以自动的方式被注释。最后,生成一组更为清楚的积极样本集,在第二轮中训练分类器。这一积极样本集被用来计算选择积极样本集时的误差。
4 使用VeDAS检测整个可见车辆
在这一章节中,我们
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31331],资料为PDF文档或Word文档,PDF文档可免费转换为Word

