英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
双电机电子液压制动系统分析与设计
熊路, 袁冰, 广雪玲, 徐松林
同济大学
摘要:本文通过分析多个电子液压制动系统详细方案,提出了双电机电子液压制动系统的想法。 作为一种新的解决方案,双电机电子液压制动系统可以主动模拟踏板感觉,充分利用踏板动力(来自驾驶员),和显著减少每个有功功率源的最大输出功率。 值得注意的是,与现有的电子液压制动系统相比,这是一个独特的创新。首先提出概念, 再构思一般的研究思想和方法,然后进行双电机电子液压制动系统的设计。 最后, 运用AME Sim软件建立仿真模型并模拟和验证模型的可行性。
介绍: 电动汽车的热潮推动着当今制动系统向线控制动方向发展,这不是符合模块化、集成化和机电一体化的现代汽车仅有的发展趋势[1,2],而是满足电动汽车带给制动系统的新要求 [3]。从功能上来说,要实现制动能量回收,电动汽车的一个典型的制动过程由电动机回收制动和其他类型的制动组成。 考虑到电机回收制动和使再生制动的能量最大化的特点,由另一种类型的制动系统产生的制动力必须可实时调整。 线控制动系统在当时无疑是最佳的选择。 作为在制动系统中一项革命性的技术,线控制动系统将最终取代现有的制动系统是有争议的[4、5、6]。
线控制动系统可以细分为两种类型: 电子液压制动系统(EHB)和电子机械制动系统(EMB)[7]。 EMB系统是全电动制动系统,其液压和气动部分(主气缸、真空助力器、制动管道等)完全完全被机电部件取代[8]。EMB系统被认为是未来制动系统的主要形式,但是仍有一些关键技术问题需要解决, 如42 V汽车电源供应,高可靠性,高的容错性、高抗干扰能力等等。EHB系统,作为一个从传统制动系统向EMB发展的过渡产品,用一些电子组件替代了一些机械部分,但保留了原来的液压部分以确保高的制动可靠性[9]。此外,EHB系统仍然可以使用12 v电源供应,因此现有的汽车电路可以满足要求。EHB系统在安全性、快速响应、实现再生制动的便利、准确地调节制动力方面表现优越。 通过具体的控制算法,EHB系统可以实现一些主动安全功能,如ABS,ESP,TCS等等[10]。 因此世界上几乎所有的主要汽车零部件供应商仍在大力发展EHB系统。
根据有功功率源的类型,现有的电子液压制动系统可分为两类:一个以泵压力蓄电池为有功功率源[11、12、13],另一个则是电动电机减速机[14、15、16]。不管是何种类型的有功功率源,最新的电子液压制动系统都具有以下特点:
1. 只有在失效保护模式下踏板可以通过机械或液压方式作用于主缸,而在正常运行模式不使用踏板的力量。
2. 一个系统只有一个有功功率源,这意味着系统只需要一套泵压力蓄电池或电机减速机作为有功功率源。当系统经历高强度制动或紧急制动时, 唯一有功功率源的最大输出功率可能很大,这可能会导致电流过载从而减少电动机寿命和增加控制难度。
3. 几乎所有的踏板模拟器是被动的。
4. 自动防故障装置冗余不足。
综合考虑了现有电子液压制动系统的特点和制动系统的发展趋势,本文试图探索实现新的电子液压制动系统, 并提出了双电机电子液压制动系统的概念,顾名思义需要两套电动电机减速机作为有功功率源。与传统的电子液压制动系统相比,双电机电子液压制动系统具有以下特点:
1. 一个系统有两个有功功率源,两个功率源共同提供系统所需动力,可有效减少每个有功功率源的最大输出功率;
2. 两个有功功率源可以提供两个独立的输入。 对于一个特定的踏板力输入,系统不仅可以产生相应的制动力,而且会生成一个踏板行程反馈,因此系统可以主动模拟踏板感觉;
3. 通过活动踏板仿真发现,系统可以充分利用踏板力(来自驾驶员),这可以进一步减少每个有功功率的最大输出功率;
4. 两个独立的有功功率源增加了系统的故障安全冗余。 此外,为了实现主动踏板模拟和踏板动力利用、需要一组连接机制将踏板和主缸连接起来,这可以进一步提高系统的故障保险功能。
因此,本文对双电机电子液压制动系统进行研究主要分四部分:典型EHB系统分析、双电机电子液压制动系统的设计思想和方法、双电机电子液压制动系统的设计和优化、双电机电子液压制动系统的建模与仿真。
典型EHB系统分析
主要功能单元
从结构上和功能上,一个典型的电子液压制动系统主要包括五个功能单元:踏板模拟单元,主动压力供给装置,液压控制单元(HCU),电控单元(ECU)和模式开关操作装置。
踏板模拟单元:主要包括踏板,踏板行程模拟器,力传感器和位移传感器,用于模拟踏板感觉和传输踏板输入信号(踏板行程,踏板力等等)到电气控制单元来识别驾驶员的制动意图。
主动压力供给单元:主要包括有功功率源和液压缸、负责构建液压。
液压控制单元:主要由制动管道和电磁阀组成,通过相应的电磁阀开/关控制来调节液压。
电子控制单元:处理来自传感器的信号和根据其内置的控制程序输出相应的命令到相关执行机构(如液压泵、马达、电磁阀等等)来实现预定义的功能。
模式开关操作装置:主要由电磁阀组成,其通常集成在HCU中;负责制动系统的操作模式在正常模式和失效保护模式之间切换,以确保制动的可靠性。
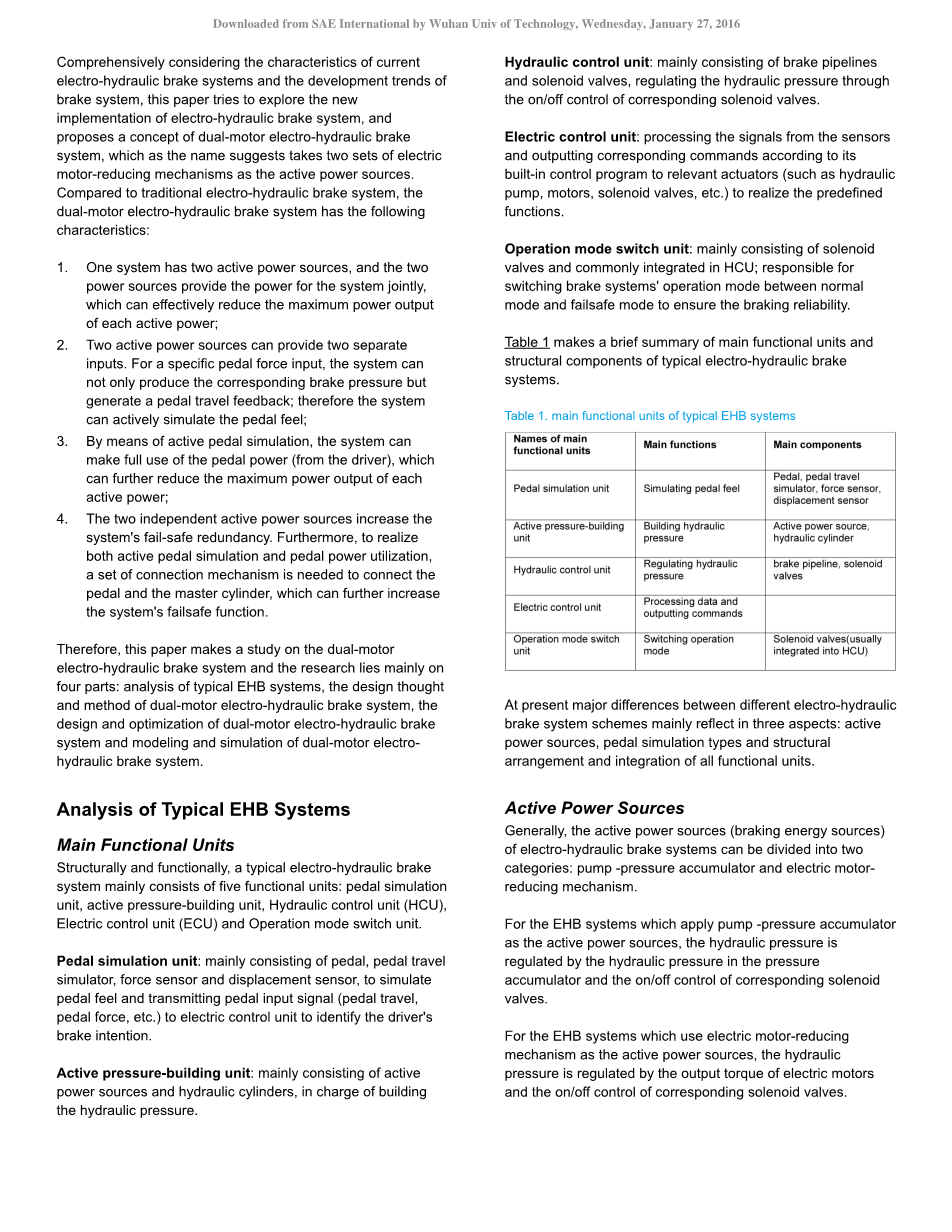
表1简要总结了主要功能单元和电子液压制动系统典型结构的组成部分。
表1 典型EHB系统的主要功能单元
|
主要功能单元名称 |
主要功能 |
主要部件 |
|
踏板模拟单元 |
模拟踏板感觉 |
踏板,踏板行程模拟器,力传感器,位移传感器 |
|
主动压力构建单元 |
构建液压 |
有功功率源,液压缸 |
|
液压控制单元 |
控制液压 |
制动管路,电磁阀 |
|
电控单元 |
处理数据和输出命令 |
|
|
模式操纵开关单元 |
转变操作模式 |
电磁阀(通常集成在HCU中) |
目前不同电子液压制动系统方案之间的差异主要反映在三个方面:有功功率源,踏板仿真类型和所有功能单元的结构安排和集成。
有功功率源
一般来说, 电子液压制动系统的有功功率源(制动动力源)可分为两类:泵压力蓄电池和电动电机减速机。
对于应用泵压力蓄电池作为有功功率源的EHB系统,液压压力由液压蓄压器和相应的电磁阀的开/关控制。
对于应用电动电机减速机作为有功功率源的EHB系统,液压压力是由电动机的输出转矩和相应的电磁阀的开/关控制。
踏板仿真类型
目前主要有两种类型的踏板行程模拟器:主动踏板行程模拟器和被动踏板行程模拟器,后者可分为加载弹簧(或橡胶弹簧)被动踏板行程模拟器和液压被动踏板行程模拟器。 相比于被动踏板行程模拟器,主动踏板行程模拟器可以根据不同制动条件来调节其特性曲线 (踏板力和踏板行程之间的关系)。因此,它可以较好的模拟当前踏板状况。
表2 主动踏板模拟器和被动踏板模拟器对比
|
踏板模拟器类型 |
主要部件 |
结构复杂度 |
模拟效果 |
|
被动踏板模拟器 |
弹簧,橡胶,液压缸,电磁阀 |
简单 |
一般 |
|
主动踏板模拟器 |
电动马达,运动转换装置,传感器等 |
复杂 |
好 |
主动踏板模拟器或被动踏板模拟器都有其优点和缺点。 被动踏板模拟器,由于其结构简单、成本低、可靠性高和空间布局紧凑,被广泛应用于现在的电子液压制动系统。但是对于一些特定的电子液压系统,除了单独设置一个主动踏板模拟器,还可以结合其结构特点及相应的控制算法来有效模拟踏板感觉。
EHB系统典例
以SCB和MK C1产品为例来简要描述典型的电子液压制动系统的结构组成。SCB是由天合公司研发的一款EHB系统,其原理图是显示在图1中,MK C1是由大陆集团研发,及原理图显示在图2中。
图1 SCB的原理图
踏板模拟器:被动踏板模拟器
有功功率来源:由泵和高压蓄能器组成。
液压控制单元:由8个电磁阀组成(4个增压电磁阀和4个减压电磁阀)和传感器(位移传感器1,压力传感器2,3和4)。
模式开关操作单元:开关电磁阀(集成到HCU)。
图2 MK C1的原理图
踏板模拟器:被动弹簧踏板模拟器。
有功功率来源:由一个电动马达和减速机构。减速机构是滚珠丝杠。 特别的是,该设计使用泵和高压蓄能器辅助电源。
液压控制单元: 由8个电磁阀(编号4和5)和传感器(如位移传感器、压力传感器、角度传感器等)组成。
模式开关操作装置:由两个集成到液压控制单元的隔离阀组成。
双电机电子液压制动系统的设计
双电机电子液压制动系统的设计思想和方法
本文旨在探索一个全新的实现模式,使用电动电机减速机作为有功功率源的电子液压制动系统来有效模拟踏板感觉,和充分利用踏板的力量。踏板感觉模拟灵敏条件下,这个系统实际上是一个二自由度系统,它有两个输出(液压和踏板行程)。在制动过程中,特别是再生制动过程, 当保持一个特定的踏板的感觉时,系统必须有两个输入来调节目标液压,。 因此两个电动马达用于这个系统。
图3显示了一种双电机电子液压制动系统的拓扑图形,它具有两个电动马达和一个主缸。 这种EHB系统使用两套电动电机减速机,其中一个作为主要电源,另一个是主要负责有效模拟踏板感觉。图3中动力合成装置是机械的,它有两个功能:(1)实现踏板和两个电机之间的机械连接;(2)汇集踏板和两个电动马达的动力。
图3 拓扑图1
图4显示了另一种电子液压制动系统的拓扑图形,它具有两个电动马达和两个主缸。 两个主缸产生的制动液流动由分配器来负责分配。事实上, 图4中分配器相当于一个全液压动力合成装置,使用液压介质通过制动管道和电磁阀来汇集制动踏板和两个电动马达的动力。
图4 拓扑图2
简要介绍双电机电子液压制动系统的工作原理
如上所述,建立液压压力和有效模拟踏板感觉,双电机电子液压制动系统采用两个有功功率源。下一部分将以图4为例,简要说明双电机电子液压制动系统怎样同时实现构建压力和有效模拟踏板感觉。
在正常运行时,踏板信号(踏板力和踏板位移)被检测出并传递给电控单元(ECU)。 根据接收到的踏板信号,ECU识别驾驶员的制动意图和通过表查找计算目标液压,同时通过压力传感器得到它的实时液压。 ECU通过内置的控制程序和整个系统的结构参数计算出两个电机相应的扭矩阀门。 然后电机控制器根据从ECU获取的扭矩信号分别控制电机1和电动机2。特别的是,电动机2的输出转矩通过减速机构完全转化为轴向推力,直接作用于第二主缸的活塞。 电
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150542],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

