
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
原始论文
使用机器视觉的自动苹果分拣系统的设计
M.M. Sofua,*, 0. Erb, M.C. Kayacana, B. Cetisllib
土耳其伊斯帕尔塔德米雷尔大学机械工程学院
土耳其伊斯帕尔塔德米雷尔大学计算机工程学院
文章信息
文章历史
2015年11月24日收到
2016年4月收到修订格式
2016年6月29日接收
2016年7月6日可用
关键词
机器视觉 水果在线分类 苹果
摘要
本研究提出了一种实时处理的苹果自动分拣和质量检测系统。根据金冠苹果、红星苹果和澳洲青苹的颜色,大小和重量将它们分类到不同的品类。它同样可以检测受结痂、色斑和腐烂影响的苹果。所提出的系统由滚筒、运输机、同类输送机结合机器视觉封闭舱室,称重传感器和控制面板单元组成。滚筒和输送机输送带有两个通道,为了分析苹果的视觉特性,在辊式输送机上设置两个相同的工业彩色照相机。可以使用图像处理软件在0.52秒内捕获和处理在传送带上滚动的任何苹果的四幅图像。因此,本发明的机器可以实时使用两个通道平均每秒排列15个苹果。在实验研究中,系统设计使用三种不同的输送带速度和三个苹果栽培品种进行测试,分选和检查183个样品平均分拣准确率为73-96%。
1.简介
如今,只有符合一定标准的水果才能有效率地提供给更优质的市场,而各种自动分级机正是用来确保水果满足这些标准。 特别是以高吨位收获的苹果果实,需要自动分级机以提高经济效益。苹果果实有着非常多的品种。因此,苹果具有不同的颜色和尺寸,必须分类以便作为更好的出售到市场。苹果的质量由颜色,重量,尺寸和它们的缺陷所决定。
任何苹果自动分拣系统都主要由机器视觉,输送带,分离器和分类器组成。 因此,它具有机械,电气,电子和软件部件。 关于苹果的第一个处理是在机器视觉部分完成的,通常用于苹果分类系统的不实时操作,在相机下拍摄单个苹果的图像(Sabliov等人,2002; Nicolai等人,2006)。而在实时图像处理研究中使用的装置可以获得更快和更有效的分类结果(Fattal等人,2008)。
现在有许多利用苹果的颜色,大小和色斑进行分类的研究。影响苹果分类质量的最重要的特征是色斑和腐烂。大多数研究都关注这一领域(Du和Sun,2004)。苹果腐烂和色斑的准确分类的百分比低的原因之一是苹果的花萼和茎部分的自然几何形状被误认为是腐烂或色斑(Penman,2001)。Li等人(2002)使用神经网络(NNs)来解决这个问题。但由于其结构笨重,他们提出的系统只能处理低吨位的苹果。 Pla等人(2001)在他们的研究中在实时分类机制中通过颜色分类而创建的颜色图(被称为查找表(LUT))来执行分类。在许多简单的颜色分类研究中,如Yam和Papadakis在2004年进行的研究中,通过使用不同的颜色空间进行分类。在对果实的前瞻性分类研究中,也有使用近红外(NIR)或中红外(MIR)高光谱成像技术和硬件的研究。这些硬件和技术可以获得苹果的香气,糖,多糖比和内部结构紊乱的信息(Nicolai et al。,2006; Baranowski et al。,2013)。由于苹果表面的不均匀照明,区分苹果和背景是一个非常重要的问题。 Mizushima和Lu(2013)使用支持向量机解决了这个问题,并提出了使用Otsu算法的自适应分割。 Zhang等人(2015)使用自动光校正检测缺陷。其他最广泛使用的分类标准是大小。在理论上,苹果被分类为I类,II类和其它类(在欧洲标准中确定的(Anonymous,1989))。但是这些标准可以根据客户需求而改变。
苹果分拣有不同的分类方法,如神经网络(Unay和Gosselin,2002; Li等人,2002; Bhatt和Pant,2015),支持向量机(Mizushima和Lu,2013),决策树(Kavdir和Guyer ,2008),基于规则(Wen和Tao,1999)和基于统计的树(Kavdir和Guyer,2008)。
在本研究中,设计了苹果自动分拣系统,并在硬件和软件中实现。系统的性能通过使用总共183个样品的金冠苹果、红星苹果和具有不同几何形状和颜色的澳洲青苹进行测试,并且已公布结果。通过污点,颜色,重量和大小特征作为实验中的依据将苹果分类。
- 材料与方法
一般水果分类中使用的设备是由简单的图像处理设备组成的(陈等,2002)。在本研究中,机械和输送机部件由Genccedil;guuml;ccedil;san公司设计和实现。然后我们在主输送机上设置机器视觉系统,并在德米雷尔大学的CAD-CAM研究与应用中心对程序进行编码以控制系统和处理图像。机器放置在封闭区域的地面上。因此,日光和湿度不会对机器造成影响。但封闭的环境并不能完全消除环境的负面性。该系统采用共183金冠苹果、红星苹果和澳洲青苹样品进行测试。苹果在这台设备上通过两个摄像头通过两个通道进行处理,并使用K-均值算法将苹果与背景区分开。从二元苹果图像检测色斑,缺陷,痂,茎和花萼。苹果按大小和重量分为小的、正常的和大的,按颜色分为浅、暗两类。我们也将苹果列为有缺陷且无缺陷的苹果。C4.5算法分类器由于其简单性和规则的结构而被优选作为公共分类器。在这项研究中的创新是软件可同时在线完成色斑分类工作和颜色、大小属性分类工作。
2.1.硬件
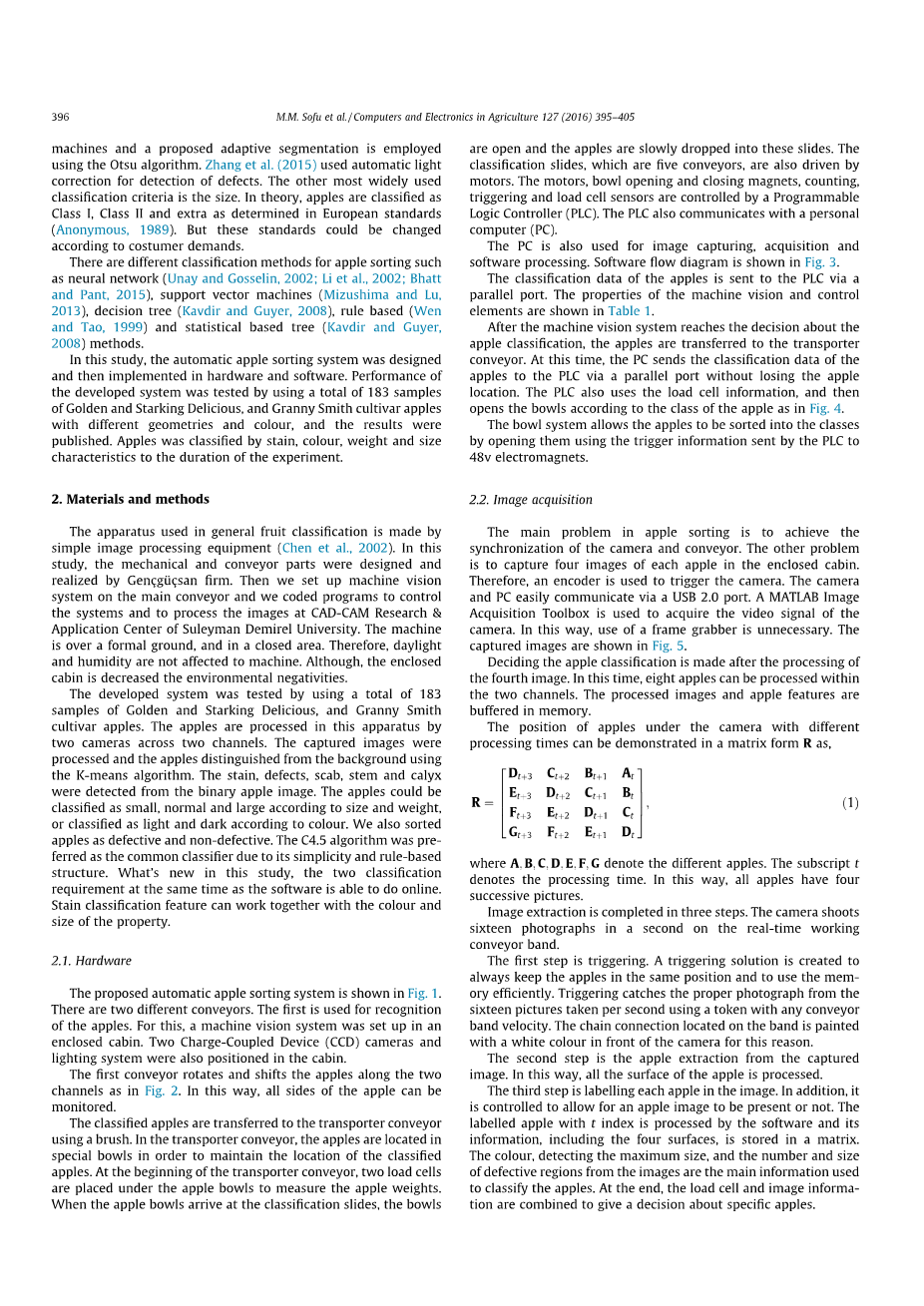
提出的自动苹果分拣系统如图1所示。有两个不同的输送机。第一个用于识别苹果。为此,在封闭的舱室中建立了机器视觉系统。
两个电荷耦合器件(CCD)照相机和照明系统也位于客舱。第一输送机旋转并沿着两个通道移动苹果,如图2所示.以这种方式,可以观测到苹果的所有面。
需要分类的苹果使用刷子转移到运输机输送段。在运输机输送段中,苹果位于特殊的碗中,以保持苹果的位置。在运输机输送段前端,两个称重传感器放置在苹果碗下方以测量苹果重量。当苹果碗到达分类载玻片时,碗打开并且苹果缓慢地落入这些载玻片中。作为五个输送机的分类载片也由电机驱动。由可编程逻辑控制器(PLC)控制电机,碗开闭磁铁,计数、触发和称重传感器,并个人计算机(PC)通信。
PC还用于图像捕获,采集和软件处理。软件流程图如图3所示。
苹果的分类数据通过并行端口发送到PLC。机器视觉和控制元件的性质如表1所示。
在机器视觉系统完成关于苹果分类的决定之后,苹果被转移到输送机。此时,PC通过并行端口将苹果的分类数据发送到PLC,而不丢失苹果位置。PLC使用称重传感器信息,然后根据苹果的类别打开碗,如图4所示。
碗系统接收PLC发送的48V电磁铁触发指令后打开碗使苹果完成分类。
图1苹果自动分拣系统
图中Roller line:滚轴线;Counter sensor:计数传感器;Conveyor:输送带;PLC interface:可编程控制器界面;Computer:计算机;Software interface:软件界面;Classification line I:分类线I;Lighting box:照明箱;Spot lighting:聚光照明;burst of light separator:曝光分离器;Cameras and focus:照相机和焦点。
图2 苹果的输送
图3 软件流程图
图中Start:开始;Triggering:启动;Number of bowls:确定碗的数量;Counting bowl:计数碗的总数;Removal of four surface appearance of an apple:获取苹果的四个外观表面;Apples are available for control:苹果是否可用;Are the stain options open: 色斑选项是否打开 ;Are the colour options open:颜色选项是否打开;Are the size options open :尺寸选项是否打开;Stain Control:色斑控制;Colour Control:颜色控制;Size control:尺寸控制;Control of the four surface appearance for size,colour and stain:四个外观表面色斑,颜色和尺寸控制;Creating a parallel port data:创建并行端口数据;Write on the screen:屏显;Record to the Database:记录到数据库;(n)Apples to(n)bowls(With PLC):将n个苹果放入n个碗中(在PLC控制下);Separating the class with PLC:用PLC分类;Finish:结束。
表1 使用的硬件的属性
表中Element:元件;Property:属性;CCD colour camera:CCD彩色相机;Firm:公司;matrix vision:矩阵视觉;model:型号;resolution:解析度;frame rate:帧速;connection:连接;Lens:镜片;mount:安装;focal length:焦距;Lighting:照明;type:类型;halogen spot:卤素点;Cabin:舱室;Sheet metal:钣金;PC:计算机;PLC:可编程控制器;Load cell:称重传感器。
图4 碗系统:(a)苹果分类管理(b)碗的触发系统
图中Class separation:分类;Drive chain connection:传动链连接;Cast channel:投放渠道;Magnet:磁铁;Trigger spring:触发弹簧;Cover classification:分类盖;Magnet trigger:磁铁触发器;Classification pin:分类销。
2.2.图像采集
苹果分拣的主要问题是实现相机和输送机的同步。另一个问题是捕获封闭的舱室中的每个苹果的四个图像。因此,使用编码器来触发相机。相机和PC可通过USB 2.0端口轻松通信。 MATLAB图像采集工具箱用于采集摄像机的视频信号。以这种方式,不需要使用帧抓取器。捕获的图像显示在图5中。
在处理完第四个图像之后进行确定苹果分类。在这个时候,可以在两个通道中同时处理八个苹果,并将处理的图像和苹果特征缓存在存储器中。
苹果在相机下具有不同处理时间的位置可以以矩阵形式R表示。
(1)
其中A; B; C; D; E; F; G表示不同的苹果。下标t表示处理时间。这样,所有的苹果都有四个连续的图片。
图像提取分三个步骤完成。相机在实时工作传送带上第二次拍摄十六张照片。
第一步是触发。创建触发解决方案是为了始终将苹果保持在相同位置并有效地使用内存。触发器捕获来自使用任何传送带速度下每秒拍摄的十六张照片中的正确照片。由于这个原因,需要将照相机前传送带上的链连接涂成白色。
第二步是从捕获的图像中提取苹果图像。以这种方式,处理苹果的所有表面。
第三步是标记图像中的每个苹果。并且,图像被分为允许存在或不允许存在苹果图像。标记的苹果的t指数由软件处理,并且其信息,包括四个表面,被存储在矩阵中。颜色,最大尺寸,以及来自图像的缺陷区域的数量和大小会用于分类苹果。最后,称重传感器和图像信息共同给出关于特定苹果的决定。
图5触发系统:(a)白色链(b)触发机器视觉捕获的图像。
2.3.苹果的特点
某些功能对于成功排序苹果非常重要。在工业应用中,苹果的颜色,尺寸和重量通常是使用的特征。可以通过图像处理获得颜色和尺寸特征。
2.3.1.颜色
大多数时候,当苹果收获时,生产者绝不会混合不同品种的苹果。然而,浅色和深色检测可能对于任何苹果品种都是必要的。
RGB颜色模型用于颜色分类。 Leemans等人(1997)作出了苹果的表面颜色分类图。用苹果表面颜色的色调的数值区分不同苹果的颜色。
对苹果表面色泽的研究表明,可以通过观察金冠和红星品种苹果中红色苹果中的红色密度进行分类。此外,红色密度有助于将不同的黄色苹果分为亮的和暗的。红色的密度差异用于分类金冠品种。蓝色密度之间的差异有助于分类澳洲青苹品种
在Ouml;zongun等人(2014)的研究报告中,根据环境因素,例如高度和阳光,在相同苹果品种的颜色深浅中观察到差异。在本研究中,高度因素是一个难以解决的问题,因为相机是固定的,但是与光有稍微不同的情况。阳光可以进入封闭的苹果小屋。使用篷布附着在苹果入口处以减少光的射入,但依然会有一些光进入。由于缺少相应的硬件设施,我们试图通过软件来减少这方面的影响。
在本研究中,通过利用红色,绿色和蓝色之间的差异来提高识别率
2.3.2.大小
苹果的大小由二进制图像确定,如图6所示。从四个图像的高度b1和宽度b2计算的最大值bmax即为苹果的直径。长度的像素值可以转换为厘米值。然后可以使用苹果的大小将苹果分类成三个或更多的类。在本研究中,苹果的大小被分为小,中,大三类。
全文共18136字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144942],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

