
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
微机电系统中传感器的革命
Masayoshi Esashi
日本仙台,东北大学,世界第一国际研究中心-先进材料研究所(WPI-AIMR)
2012年1月11日2012年5月28日2012年7月17日在网上发布
摘要:微机电系统(MEMS)技术实现的微传感器作为系统的输入设备起着关键的作用。在本报告中,对以下传感器进行了综述:压敏电阻和电容式压力传感器、声表面波(看到)无线压力传感器,为机器人触觉传感器网络,加速计,角速度传感器(陀螺仪),范围使用光学扫描仪图像传感器,红外成像仪、化学传感系统的傅里叶变换红外(FTIR)光谱、气相色谱法对液体流量传感器,医疗传感器,如超细光纤植入血压传感器和压力传感器。
copy;2012年,日本应用物理学会
0. 引 言
微机电系统(MEMS)技术不仅能够形成晶体管电路,而且能够利用半导体微加工技术在硅(Si)芯片上机械操作结构,它已被用于实现各种系统中的关键设备1)。采用MEMS技术的传感器的小型化也将提高其灵敏度和响应速度。由于这种传感器是由许多晶圆片上的芯片制造而成,因此可以通过大规模生产来降低制造成本,并通过将传感器与多个设备和电路集成来实现更高级的功能。
- 压力和力传感器
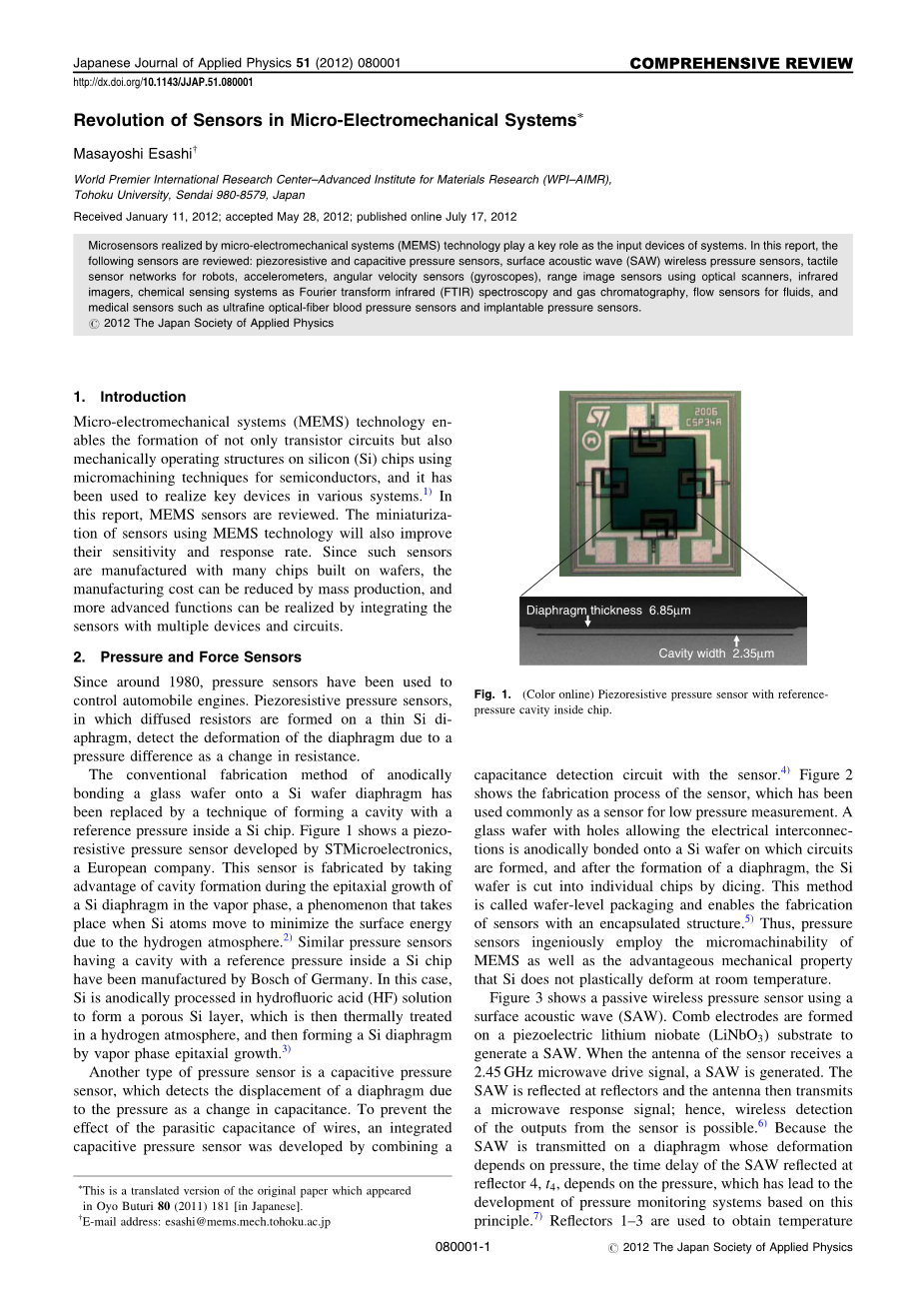
从1980年左右开始,压力传感器被用于控制汽车发动机。压阻式压力传感器是将扩散电阻安装在硅薄膜上,检测薄膜由于压力差引起的电阻变化而产生的变形。传统的硅晶圆片与硅晶圆膜片阳极连接的制造方法已经被一种在硅晶片内形成参考压力的腔的技术所取代。图1显示了一个由欧洲意法半导体公司开发的压阻式压力传感器。该传感器是利用硅薄膜在气相外延生长过程中形成的空腔来制造的,这种现象发生在硅原子移动时,以使氢气氛引起的表面能量最小化2)。德国博世公司也制造了类似的压力传感器,这种传感器在硅晶片内部有一个带有参考压力的腔体。在这种情况下,硅在氢氟酸(HF)
膜片厚度6.85mu;m
腔宽度2.35mu;m
Diaphragm thickness 6.85m
Cavity width 2.35m
图1所示。(彩色在线)压阻式压力传感器,芯片内部有参考压力腔
溶液中进行阳极处理,形成多孔硅层,然后在氢气氛中进行热处理,然后通过气相外延生长形成硅膜3)。
另一种类型的压力传感器是电容式压力传感器,它检测由于压力引起的膜片的位移。为了防止导线寄生电容的影响,将电容检测电路与传感器相结合,研制了集成电容式压力传感器4)。图2为传感器的制作过程,通常作为低压测量传感器使用。带有孔的硅晶圆片被阳极连接到硅晶圆上,在硅晶圆上形成电路,在形成膜片后,硅晶圆片被切割成单个芯片5)。因此,压力传感器巧妙地利用了微电子机械系统(MEMS)的微细加工能力,以及Si在室温下不发生塑性变形的优越机械性能。
图3显示了使用表面声波(SAW)的无源无线压力传感器。梳状电极是在铌酸锂(LiNbO3)压电基板上形成的,用以产生锯。当传感器的天线接收到2.45 GHz的微波驱动信号时,就会产生一个SAW。所述声表面波在反射器上反射,然后天线发射微波响应信号;因此,无线检测传感器的输出是可能的6)。由于锯片是在膜片上传输,膜片的变形与压力有关,所以反射到反射镜4、t4处的锯片延时与压力有关,这就导致了基于这一原理的压力监测系统的发展7)。反射器1-3用于获取温度信息和补偿温度。图3所示为相位与压力之间的关系,利用每个反射器的时间延迟(t)进行转换变成无线电波的相变。传感器,膜片的变形取决于压力采用MEMS技术在LiNbO3衬底上形成;具体来说,1)热极化反演技术,时,形成极化反层LiNbO3基板加热,并以2)选择性蚀刻为基础讨论了在HF溶液中刻蚀速率的特性取决于偏振方向8)。
接下来,以触觉传感器为例介绍力传感器。预期将与人类接触工作的机器人,如护理机器人,必须在其身体表面安装许多触觉传感器,以确保安全。图4显示了20年前为实现这一目的而开发的普通双线触觉传感器网络9)。许多触觉传感器与两根普通电线相连,这两根电线不仅用来导电,而用来调节电压,依次选择特定的传感器,
n-Si
电路形成
p -Si CMOS 电路
玻璃状
阳极键合
Si3N4
Ti-Pt
Cr-Cu-Au
Si 蚀刻板 (隔膜形成)
2.2 mm
菱形装置
图2所示。(彩色在线)集成电容式压力传感器由晶圆级封装。
反射镜1 反射镜 2 反射镜 3 反射镜 4
t1 t2 t3 t4
LiNbO3
Co
参考压力腔
电锯无线传感器照片 横截面
相位
[rad]
压力[K Pa]
图3所示。(彩色在线)SAW无源无线压力传感器的原理、照片及测量实例(时间转换为相位)。
并根据电流读出传感器发出的信号。此时,电线一个接一个地选择传感器,这意味着当传感器数量增加时,读取信号需要更长的时间。因此,在机器
电源和传感器的选择
普通双线触觉传感器
读出传感器信号
1mm
图4所示。(彩色在线)常见的两线触觉传感器网络,按顺序选择传感器。
人体表放置多个传感器会增加读取信号所需的时间,使得实时触觉检测变得困难。
一个事件驱动(中断)触觉传感器网络中,它在与目标接触时开始检测,类似于人类皮肤的触觉感知,许多传感器可以放置在一根公共电线上。图5显示了一个操作示例和用于为此目的开发的触觉传感器网络的IC的照片10)。
当一个传感器接收一个力,集成电路将信号传输到一个常见的线来确定传感器的位置接受力和力的强度。MEMS技术具有将电路与传感器集成的能力,可以实现传感器的网络化。
- 加速度计和陀螺仪
加速计已被用于安全气囊的碰撞检测,自1990年左右开始安装在汽车上。目前,加速度计被广泛应用于移动设备和游戏机的用户界面。另一方面,角速度传感器,也被称为陀螺仪和检测旋转,自2000年以来,已被用于汽车系统,以确保在运行期间的安全,
力传感器
传感器值
转换
感官
译码
控制器
Resistor
信号传输/接收
线
序列化
柔性电路
电阻器
P序言 CRC
开始 ID 数据 结束
200s
2V
上表面 下表面
图5所示。(彩色在线)事件驱动(中断)触觉传感器网络原理图,操作示例,原型IC照片。
并用于相机的图像稳定。加速度计和陀螺仪都测量由于目标运动而施加在传感器内的质量数的惯性力。虽然在这些惯性传感器中采用了复杂的平面结构,但利用光刻技术加工微电子机械系统(MEMS)有利于这种结构。
图6显示了由美国模拟设备公司开发的集成加速度计11)。如图6(上)中传感器的横断面图所示,在电容检测IC上形成了一个由弹簧系统支撑的证明质量的多晶硅(poly-Si)结构。当证明质量受侧向加速度引起的惯性力移动时,集成电路检测到1.5-mu;m厚的多晶硅结构略有变化。该装置是通过表面微加工来制造的。在磷玻璃牺牲层上形成聚硅结构,蚀刻去除牺牲层。由于沉积过程中,聚硅结构在厚度方向上的应力变得不均匀,因此在牺牲层的刻蚀过程中,必须在1100 ℃经过持续3个小时的热处理,防止结构发生偏转。因此,采用能承受这种热处理的3 - mu;m宽双极互补金属氧化
多晶硅
电路 (3m BiCMOS)
Si
证据质量
腐蚀孔
塞子
弹簧
自测电容致动器 末端棒
固定棒
移动棒
图6所示。(彩色在线)聚硅表面微机械集成加速度计(横断面结构和两轴加速度计照片)。
物半导体(BiCMOS)电路。由于它与电容检测电路集成,所以即使在加速度计中证明质量的运动为0.1纳米,也可以进行检测。据报道,一个集成了类似结构的陀螺仪检测到了1/ 60000纳米的移动12)。图6还显示了一张双轴加速度计的照片,它可以利用在平面上向两个方向移动的质量证明来探测两个轴上同时发生的加速度。由于在装置上还安装了自检结构,因此可以通过施加静电力模拟碰撞对证明质量的冲击来对气囊系统进行自诊断,并在不施加实际加速度的情况下评估晶圆片上的芯片质量。
意法半导体公司生产了表面微机械加工的电容式传感器。m厚低应力外延聚硅证明质量和弹簧。由于这种厚的多晶硅层,可以利用结构侧面的大电容,通过在一个单独的芯片上制造电容检测电路来实现低成本的生产。
外延多晶硅 线焊接
Si
15m
Si
活动节 固定节
图7所示。(彩色在线)具有厚外延硅层的加速度计原理图和谐振陀螺仪照片。
驱动监控电报
驱动电极
伺服电机
频率调整电极
检测电极
图8所示。(彩色在线)汽车传感器的偏航率和加速度。
图7显示了用于游戏机和移动信息设
备用户界面的电容式加速度计的横截面芯片结构和陀螺仪的照片13)。典型的硅外延生长条件如下。首先,在低压化学气相沉积(LPCVD)反应器中,以650℃形成125毫米厚的成核层。然后,在1100℃的外延生长反应器中,将低应力(3mpa)的外延聚硅层作为纵向柱生长14)。
在MEMS振动陀螺仪中,振动驱动的验证体受到一种称为科里奥利力的惯性力的作用,该惯性力与角速度成
3mm
Si 700nm-thick-Ge
SiO2 500nm-thick-Al
30m-thick-Si
图9所示。(彩色在线)用于图像稳定的双轴共振陀螺仪(照片和示意图)。
5mm或更短
Si
压电PZT薄膜
200m
图10所示。使用压电薄膜的共振陀螺仪。
比例,使验证体在设备检测到的垂直方向上振动。图8显示了一个传感器
来检测偏航率(围绕垂直方向的角速度)和丰田汽车公司开发的用于汽车安全系统的加速装置15)。我使用的是硅-绝缘体(SOI)晶圆片,它是由硅结合晶圆片组成的。因此,硅层一侧的电容变化较大,与图7的情况类似,电容检测电路可以在单独的芯片上制作。证明质量是静电驱动由音叉振动横向(x轴)绕垂直于晶片的轴(z轴)旋转可产生a科里奥利力,它使证明质量振动导线方向(y轴)。这种振动改变了电容值,由设备检测。在这点,左
T温度传感器1
加热器
T温度传感器2
Terminals 腔
Si
图11所示。热加速度计的结构。
转子
旋转电极
控制电极
1.5mm
4.3mm
电容位移检测
静电磁浮
V1 V1
C1
I-V conversion
C2
V2 V2
同步检测
图12所示。(彩色在线)静电悬浮旋转陀螺仪。(a)结构,(b)悬浮原理,(c)旋转原理。
右证明质量振动不相由于科里奥利力,它
发送与接收之间的时间延迟
时间
光接收元件 脉冲激光
发射和接收光的分离
60。
双轨光学扫描仪 60。
蓝色:5m
(远程)
红色:0m
(近程)
图13所示。(彩色在线)原理利用光扫描器的距离图像传感器根据光的行进
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[234822],资料为PDF文档或Word文档,PDF文档可免费转换为Word

