英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
液压放大器设计及其基于磁致伸缩致动器的
直接驱动阀上的应用
Zhaoshu Yanglowast;, Zhongbo He, Dongwei Li, Guangming Xue, Xu Cui
石家庄机械工程学院汽车电气工程系,石家庄050003
关键词:超磁致伸缩材料 液压放大器 直接驱动阀 有限元方法 CFD
摘要:本文设计了一种基于超磁致伸缩材料的新型直驱阀。与传统的伺服阀相比,频率响应在相对大的流量下得到改善。在设计的阀门上应用具有柔性活塞的液压放大器;其结构通过弹性力学理论,有限元法和CFD法优化。该阀在AMESim中建模,并且生产原型。通过仿真和实验,设计阀门的带宽高于100Hz,流量达到30L/ min。
copy;2014 Elsevier B.V.保留所有权利。
1、介绍
电液控制系统具有宽带宽,大负载,高能量密度的优点,在现代航空工业和车辆工业中引起了广泛关注。电液伺服阀(EHSV)被认为是电气和液压系统之间的桥梁,是整个系统的关键部分。另一方面,EHSV的可靠性也受到怀疑,因为它对油污染非常敏感[1]。
直接驱动阀(DDV)是一种新型的伺服阀,由于阀芯直接与驱动器连接,具有快速响应的特性,对油污染和低滞后性不敏感,DDV被认为是EHSV开发的趋势。系列公司和组织已经开始努力开发符合民用和军事要求的DDV产品。机电传输设备是DDV的关键组件。各种类型的DDV,可以通过他们的电动力学装置分类[2]。由Moog公司开发的基于移动的线性电机DDV在35MPa的系统压力下,可以在50Hz中达到40L/min的流量[3]。吴帅开发了基于三重冗余音圈电机(VCM)的DDV,并基于PSO方法进行了优化[2]。Grunwald和Olabi设计了两种基于磁流变流体(MRF)的压力控制装置,即MR阀和MR阀,并且MR阀在保持压力方面表现出更好的性能而没有显着的泄漏[4-6]。
近年来,许多智能材料被应用于具有快速响应,大能量密度和高居里温度的特性的DDV,在巨磁致伸缩材料(GMM)的设计中,超磁致伸缩致动器(GMA)是GMM的应用,产生的微小位移信号非常精确,自20世纪90年代以来,人们发现GMA其在流量控制,主动振动控制和精密加工领域有十分好的前景[8],特别是高速伺服阀在高频环境工作中的设计。与传统的执行器和其他智能材料相比,GMA驱动DDV的优势在于以下几个方面。
bull;与传统执行器比较
(i)与扭矩电机致动器相比
超磁致伸缩致动器(GMA)具有比GMM测试结果更广泛的带宽,从5Hz到1000Hz的激励信号可以通过GMA转换为机械振动,而具有大惯性的传统转矩电动机通常不能达到100Hz[9]。
(ii)与VCM的比较
表格1. 智能材料概述的技术特点。
|
典型特征 |
PZT |
GMM |
SMA |
|
伸长率 |
0.1% |
0.2% |
5% |
|
能量密度 |
2.5kJ/ |
20kJ/ |
1kJ/ |
|
带宽 |
100kHz |
10kHz |
0.5kHz |
|
滞后 |
10% |
2% |
30% |
|
磁/电 |
0.5-0.6 |
0.7-0.75 |
|
|
机械 |
|||
|
耦合 |
|||
|
系数 |
|||
|
居里温度 |
200-300℃ |
380℃ |
与VCM相比,GMA执行了更大的推力[2,10]。由于DDV中的液压力和弹性力大且随着频率和流量的增加而显着地增大,致动器的推力应当足够大以驱动卷轴。此外,VCM占用更多的空间,并且在结构上更复杂。GMA帮助形成紧凑简单的结构,扩展了DDV的应用范围,提高了可靠性。
bull;与其他智能材料的比较
具有应用于致动器设计的潜力的智能材料的性质[11]在表1中列出,用于简单的比较。
(i)与SMA的比较
形状记忆合金(SMA)是一种在大变形后可以恢复到相变温度以上的原始形状的材料,从表1中可以看出,其带宽受到限制并且滞后相当大,这也是因为它通常由温度驱动[12,13],这在工业环境中不容易控制。
(ii)与PZT致动器相比
根据表1,压电(PZT)致动器是GMA的替代品,同时它也受到推力的限制,从表1中可分析出,PZT具有低得多的能量密度,PZT致动器在相等冲程中产生远小于GMA的力,从第4部分获知,DVV的力要求约为120N,这意味着执行器在液压放大器之前应产生大于1000N的力。与PZT相比,GMM执行器也具有很低的驱动电压[2,13,14],从而保证了工作环境的安全性。
然而,虽然GMA在应用于DDV设计中具有许多优点,但是其行程限制了伺服阀的流量。作为文献[2,15]中设计的GMM-DDV,阀芯的行程仅为50mu;m,流量为2L/min。因此,应当使用相应的放大器来在相对宽的带宽中扩大GMM的行程。
有两类位移放大器:机械和液压。基于堆叠杠杆与弯曲铰链的机械放大器已被广泛研究和使用[16,17]:Shen[18]设计的桥式机械放大器用于DDV的PZT驱动器的放大,流量达到5.9L/min,80Hz;Lindler设计了一种基于杠杆放大器的DDV,流量达到9L/min,带宽为300Hz[19];Karunanidhi[9]开发的基于桥式放大器的GMM喷嘴瓣阀已经达到8L/min的流量。液压放大由不同区域的活塞实现:其中GMM杆驱动大活塞并通过小驱动活塞传递功率输出。与机械放大器相比,这些结构产生相当大的位移,占用的空间有限;因此该放大方法对于伺服阀设计更具吸引力。Yoon[20]开发了一种基于液压放大器的PZT执行器,研究了摩擦和油压缩的影响。Ushijima和Kumakawa开发了一种用于具有液压放大器的自适应动力系安装件的PZT致动器,其中致动器达到70mu;m的行程[21];Shibayama开发了使用密封液压放大器的PZT执行器,行程达到0.3mm[22];Chakrabarti[23-25]设计了一个基于液压放大器的GMM执行器,冲程为1.6mm,频率为20Hz。
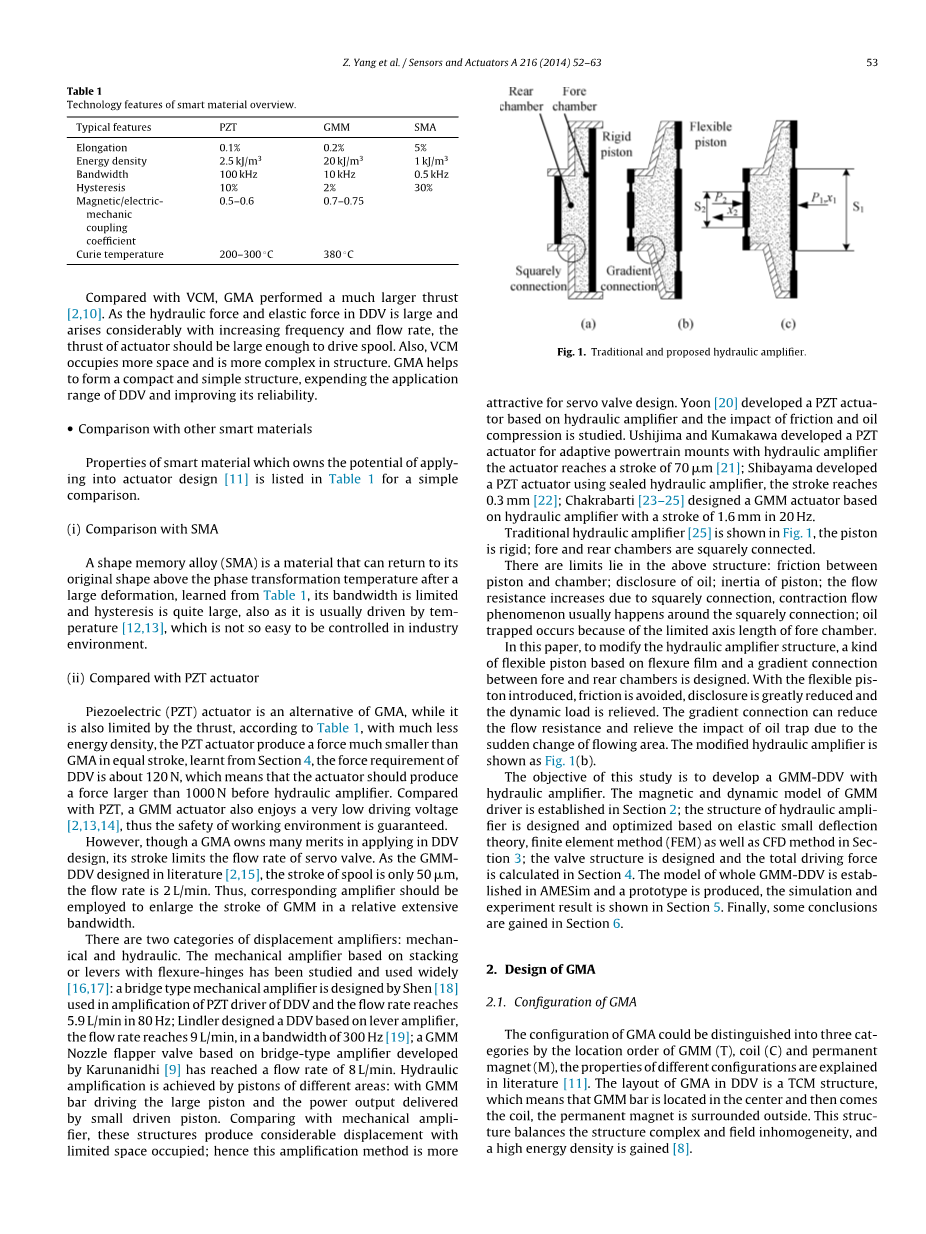
传统的液压放大器[25]如图1所示:活塞刚性;前室和后室正交连接。
图1. 传统和建议的液压放大器。
在上述结构中存在限制:活塞和腔室之间的摩擦;石油泄露;活塞惯性;流动阻力由于正交连接而增加,收缩流现象通常发生在正方形连接周围;由于前室的轴长度有限,发生油捕集。
在本文中,为了修改液压放大器结构,设计了一种基于挠性膜的柔性活塞和前室和后室之间的梯度连接。通过引入柔性活塞,避免了摩擦,大大减少了泄露,并且减轻了动态载荷。梯度连接可以减少流动阻力,减轻由于流动面积的变化而引起的油阱的冲击。改进的液压放大器如图1(b)所示。
本研究的目的是开发一种带有液压放大器的GMM-DDV。GMMdriver的磁和动态模型建立在第2节;液压放大器的结构基于弹性小偏转理论,有限元方法(FEM)以及第3节中的CFD方法进行设计和优化;设计了阀门结构,并在第4节中计算了总驱动力。在AMESim中建立了整个GMM-DDV的模型,并制作了原型,模拟和实验结果如第5节所示。最后,在第6节中得到了一些结论。
2、GMA的设计
2.1、GMA的配置
GMA的配置可以通过GMM(T),线圈(C)和永磁体(M)的位置顺序区分为三种类型,不同配置的性质在文献[11]中解释。GMA在DDV中的布局是TCM结构,这意味着GMM棒位于中心,然后是线圈,永磁体被包围在外部。这种结构平衡了结构复杂和场不均匀性,并获得了高能量密度[8]。
图2. 偏置场的功能[9]。
2.2、参数在GMA设计中确定
GMM的磁致伸缩不仅受其激励场的影响,还有一些其他参数影响其应变和应力性能,这些参数应在设计阶段确定[8]。
2.2.1、偏置场
永久偏置场是必要的,原因如下:首先,GMM的磁化曲线是非线性的。因此,适当的偏置场帮助GMA在磁致伸缩的斜率和线性两者的区域中操作lambda;达到最大值;其次,lambda;仅与磁场的大小相等,这意味着双向场H只能在一个方向上产生应变,因此交变符号的输入电流将在一个方向上诱导应变,并使激励频率加倍,这种现象称为“双频效应”。偏置场可以通过产生初始场来解决问题。偏置场的功能如如图2所示,DDV中GMA的偏置场为600Oe。
2.2.2、预应力
适当的预应力将引起垂直对准的磁性体的旋转,因此在相同的磁场下产生较大的磁致伸缩。此外,由于GMM在室温下呈脆性,预应力可以提高其强度。GMM棒在不同预应力下的磁化性能由供应商测试。如图3所示,GMA的预应力选择为10MPa,因为斜率相对较高。
2.3、GMA的建模
GMM的运动可以被认为是基于由其偏置场和预应力确定的平衡点的振动,GMM在这一点的长度被认为是在建模过程中的模拟的“原始”长度,因为以这种方式,偏置场和预应力的参数可以在磁路和动态模型中分开设置。
图3. 不同预应力下的磁化特性。
2.3.1、磁路模型
根据基尔霍夫定律,线圈的微分方程可以表示为:
(1)
其中I,U,R,L分别表示电流,电压,电阻和电感,实际电压,考虑感应电压写为:
(2)
和n分别表示线圈的磁通量和匝数。执行拉普拉斯变换,电流也可以表示为:
(3)
由于GMM的磁导率低,应该向GMM驱动器施加闭合磁环。等效磁环如图4所示。
图4. GMA的磁模型。
,,,,分别代表前轭,后轭,气隙,房屋和基座的磁阻,可以用磁阻的线性公式计算:
虽然GMM棒的电阻,执行非线性属性,不能通过线性公式反射,根据安培定律:
(4)
GMM柱的电阻可以表示为:
(5)
而x表示GMM条的变形,B(H)反映GMM的磁化。驱动器中使用的GMM棒的尺寸为50mmtimes;10mm,预应力选择为10MPa,B(H)数据可以称为图3中的相应曲线。
GMM驱动器的整个磁通量为:
(6)
2.3.2、动态模型
不考虑涡流效应和不可逆磁化,GMM的变形主要是由磁致伸缩[26]:
(7)
从GMM栏输出的力是:
(8)
和表示GMM棒的等效质量和刚度,计算如[27]:
(9)
和表示GMM杆和传送主轴的质量(图4)。输出力也可以用传递函数的形式表示:
(10)
GMM驱动器的框图如图5所示。
图5. GMM驱动程序的传递函数图。
3、液压放大器的设计
3.1、工作准则
对于液压放大器如图。参考图1(b),引入以下等式:
(11)
(12)
其中,,,表示大活塞的驱动力,等效面积,等效刚度和
全文共18308字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144824],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

