英语原文共 27 页,剩余内容已隐藏,支付完成后下载完整资料
转台云梯
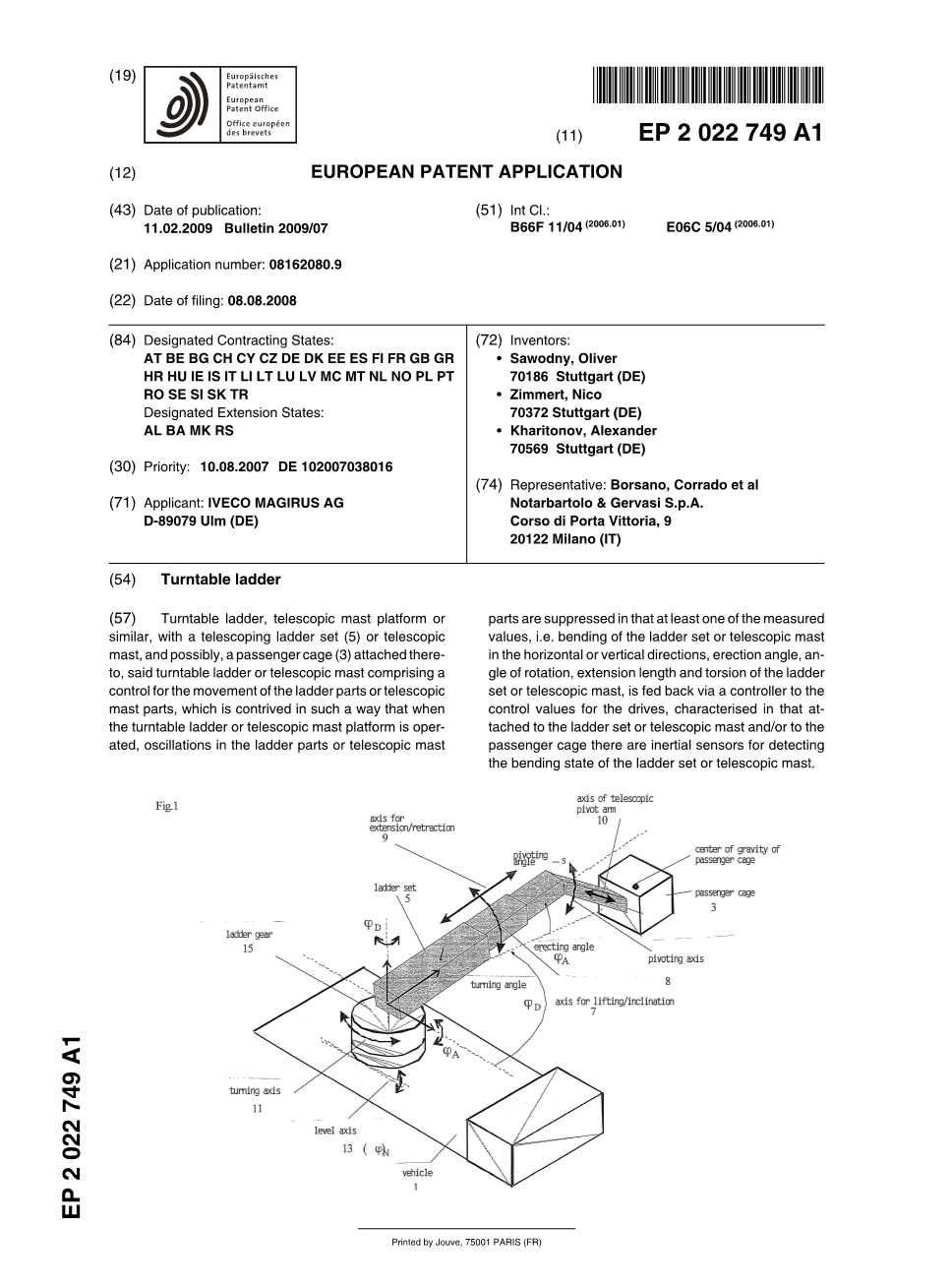
- 转台云梯,具有伸缩梯架(5)或伸缩桅杆,可能的话,附带工作斗(3)的伸缩桅杆平台或类似机构,所述转台云梯或伸缩桅杆包括对梯架部件或伸缩桅杆部件的运动控制,以这种方式设计是为了当转台云梯或伸缩桅杆平台工作时,至少这些测量值中的一个值能抑制梯架部件或伸缩桅杆部件的振荡,即梯架或伸缩桅杆在水平或垂直方向上的弯曲、安装角、旋转角度、延伸长度和梯架或伸缩桅杆的扭转,经由控制器反馈达到驱动器的控制值,云梯、伸缩梯架甚至工作斗附带的特征是具有用于检测梯架或伸缩桅杆弯曲状态的惯性传感器。
摘要
【0001】本发明涉及一种装配有伸缩梯架、伸缩桅杆,可能的话附带有工作斗的转台云梯、伸缩桅杆平台或类似机构,如权利要求1的序言。
【0002】具体地,本发明涉及一种转台云梯,例如装配有可弯曲铰接式臂架,或如铰接式/伸缩式平台和空中救援设备这样类似系统的消防梯。这些系统,在一般情况下,安装在车辆上,使得它们可旋转和直立,并且提供可弯曲的铰接式臂架,此外臂架装配有另外的轴使之可以伸缩。控制装置是一个连续的轨迹控制系统,其沿着预定轨迹在转台云梯或升降平台的工作区域内移动工作斗和升降平台。 由工作斗和升降平台产生的振荡和钟摆运动会快速被衰减。
【0003】例如,转台云梯、升降平台和类似机构的控制装置在DE 100 16 136 C2和DE 100 16 137 C2中公开。如果梯架的至少一个值被反馈,经由控制器达到驱动器的驱动值,则在梯架元件中的振荡可以被衰减。预控制装置在基于微分方程的动态模型里表示出阶梯的理想运动,并且为梯架元件的驱动器计算出理想的控制值来基本实现云梯的无振荡运动。DE 10 2005 042 721 A1公开了一种在转台云梯梯架末端的控制装置,该云梯装配有附带工作斗的铰接臂 。其动态特性包含在用于代表特征的动态模型里,因此允许控制装置的相应配置。
【0004】现有技术的铰接式梯架或类似机构通过手动操作杆液压或电动液压控制。在纯液压控制装置的情况下,手动操作杆的偏转通过液压控制回路被直接转化为设计成比例阀的控制块的比例控制信号。在液压控制回路中的阻尼元件可以使动作平稳和平滑过渡。但是,不能圆满地调整至延伸长度和安装角度的整个工作区域。此外,这往往会导致较强的阻尼调整变得反应迟钝
【0005】电流连续轨迹控制装置积极影响着在梯架振荡事件中的反向运动。 然而,振荡只能从扩展测量带信号中重建,并且其基于的模型仅考虑了基本振动组成。根据DE 100 16 136 C2和DE 100 16 137 C2,在振荡阻尼装置中不考虑高振荡模式。此外,该弯曲状态的重建仅仅依靠扩展测量带信号和从液压单元的压力信号中导出的重建。对于目前涉及谐波振荡仿真的情况,这往往是不够的。
【0006】因此,根据权利要求1的序言,本发明的任务是,要发明一种转台云梯、伸缩桅杆平台或类似的机构。其中梯子或伸缩桅杆的振荡状态可以更准确地记录和再现,以使主动发生的振荡(例如无论是在运动期间或休息时,由风或负载的变化引起的)可以被衰减,或尾端有乘客厢或工作平台的梯架可以被引导沿着预定的轨迹。 这样做不仅是为了实现基本振荡的补偿,也是为了有效地衰减振荡的高次模。
【0007】根据本发明,此任务由具备权利要求1中特征的转台云梯或伸缩桅杆平台实现。
【0008】根据本发明,惯性传感器被附连到梯架或伸缩桅杆和/或乘客厢上,用于检测梯架或伸缩桅杆的弯曲状态。惯性传感器既可以分别固定在梯架或伸缩桅杆、附着于梯架的乘客厢上,也可以都固定到梯架或伸缩桅杆和乘客厢上。
【0009】多个用于测量在不同空间方向上角速度的惯性传感器优选设置在乘客厢/或在与乘客厢连接的梯架或伸缩桅杆的尾端。
【0010】根据实施方案的另一个优选形式,惯性传感器被设置在乘客厢和/或梯架或伸缩桅杆的对应尾端,用来测量在各个空间方向上的加速度。
【0011】 例如,在梯子部件或伸缩桅杆部件顶部、或乘客厢里的回转平台,其包括多达三个在笛卡尔空间方向上用于检测角速度的传感器,已证明是十分有用的。此回转平台还可以在相应的空间方向上补充三个加速度传感器。
【0012】从附属权利要求4至9中可以得到本发明其它优选的实施方案。
【0013】特别是,根据本发明的转台云梯或伸缩桅杆平台包括预控制装置,当操作乘客厢时,预控制装置能在基于微分方程的动态模型里表示梯子和伸缩桅杆的理想运动,并且利用动态模型为梯子部件和伸缩桅杆部件的驱动器计算出理想的控制值来基本实现梯子或伸缩桅杆的无振荡运动,所述动态模型模拟出梯架或伸缩桅杆的质量分布。
【0014】如在现有技术的状态下,依据本发明,带有主动振荡阻尼的连续轨迹控制,也是以基本思想为基础,该基本思想是从描绘在基于微分方程的动态模型里,梯架或伸缩桅杆平台的机械和液压系统的动态行为出发。
【0015】对比应用DE 100 16 136 C2和DE 100 16 137 C2,动态模型所用的方法不是以作为分布式参数模型的近似即弹性多元模型为基础的,而是以云梯的分布质量直接建模。这样做,乘客厢的质量仍然可以取为点质量。
【0016】同样优选地,轨迹规划模块被用于生成梯子或伸缩桅杆在操作区域内的移动轨迹,并且以时间函数的形式传送乘客轿厢位置、速度、加速度、震荡,可能的话还有震荡的来历,到控制梯子部件或伸缩桅杆部件驱动装置的预控制块。
【0017】本发明的一个优选实施方案的示例将在下面进行更详细地描述,参考如下图:
图1是依据本发明的转台云梯一种实施方案的机械结构示意图;
图2是一个解释系统自由度的示意图;
图3是根据第一实施方案控制本发明中转台云梯运动的控制回路示意图;
图4展示了根据第二实施方案控制本发明中转台云梯运动进一步的控制回路;
图5是展示了用来描述弯曲的微分方程固有函数的图;
图6a和图6b展示了振荡的时间曲线。
【0018】而图1是表示整个系统结构的图表,图2通过一个实例,说明了本发明中转台云梯的旋转运动。以下所示发明,只以举例的方式而不以任何限制形式,涉及到转台云梯,并且还可能易用于安装有伸缩式桅杆的伸缩桅杆平台或类似机构。然后伸缩桅杆的各个部件对应所述转台云梯梯架的梯子部件。此外,本发明不仅限用于带有乘客厢的转台云梯,也适用在没有乘客厢的梯子或伸缩桅杆平台上。
【0019】图3展示了控制所述转台云梯运动的控制回路示意图。在基于模型的评估中,来自回转仪的测量数据最初在偏移关系中纠正;由梯子(也包括运动期间)固有质量引起的重力影响用扩展测量带信号计算得到。在随后的模态变换中,这些信号被用于计算前两种模式的固有振荡。然后通过反馈控制器以分离的形式补偿反馈,并因此具有振荡衰减的效果。因此结合本领域以前的情况,能同时实现基波振荡与第一次谐波振荡的衰减。
【0020】另一结构如图4所示。而与图3对比,图4仅从传感器信号中提取到基波振荡,并通过基于模型的观测器计算出高阶模态分量。其不产生第一谐波振荡的主动衰减,但可以防止高次模部分被耦合并通过反馈在车辆上产生不稳定影响。一旦分离,带有主动衰减效果的基本振荡即被反馈到驱动器的输入端。
【0021】在这两种结构中,目标的轨迹由基于模型的预控制装置引导,并因此调整来适应系统的动态,是非常有利的。这意味着可以避免由系统的指导值产生的振荡。与DE 100 16 136 C2和DE 100 16 137 C2中的控制方法不同,此处提供的方法可用于所述一般非线性情况下。
【0022】现通过安装和倾斜的示例来对此进行说明。当考虑到梯子的动态行为而忽略重力的影响时,该过程可直接转换到旋转方向。由于预控制装置的设计,参考被再次用于集中参数模型的制造。安装/倾斜方向上的运动方程式如下:
关键:
【0023】
---梯子长度,随时间变化;
---运动质量(梯架可能包括铰接部分,加上乘客厢或升降平台总质量的动态分量);
---与梯子长度有关的刚度;
---与梯子长度有关的阻尼系数;
---液压驱动的时间常数;
---液压传动的放大系数;
---旋转速度,随时间变化;
---梯子末端在水平方向上的挠度,随时间变化;
【0024】根据方程 1得到的模型方程现在转换到一般的非线性情况下。
【0025】该驱动器的输入是通过液压系统U(t)中比例阀的电压,其可以解释为公式1中目标速度phi;;因此在考虑弯曲的情况下,获得了以下非-线性状态方程以及乘客厢位置的输出方程;
为了接下来系统的分析,确定关于选择输出的系统的相关程度。Y(t)与公式(3)的相对程度等于2,这小于系统的要求(n = 4)。因此,选择与相关程度r= 4差异较小的输入:
【0026】当其对应于与真实控制值最近似的值(考虑弯曲时乘客箱的位置),没必要处理剩余用于产生参考轨迹的动力学问题。
【0027】根据VDI出版社,1997年的Rothfuszlig; R.: Anwendung der flachheitsbasierten Analyse und Regelung nichtlinearer Mehrgrouml;szlig;ensysteme,基于平面度的分析与设计都充分考虑在内。
【0028】如果假设和,根据该乘客厢位置的平稳输出,产生了下面的参数:
【0029】新系统的输入是通过指定的,并且其满足预控制的逆控制定律:
【0030】在梯子移动时,利用乘客箱位置随时间变化的目标轨迹和其派生物作为输入信息,会产生阀门位置的理想控制值,而不会产生固有振荡。剩余振荡的发生是由模型不准确和外部因素(加载/卸载乘客厢,风)造成的,并通过反馈被衰减。
【0031】在图3的结构下,反馈通过来自扩展测量带和回转台的测量信号,加独立振荡信号的反馈的模态细目获得的。
【0032】梯架模拟为分布质量,乘客厢模拟为在梯架末端的点质量,这意味着集中质量动力学的边界条件必须得到满足。虽然考虑到了在垂直平面上梯子的振荡(后者可能因某一安装角度倾斜),但当小角度的数学模型被假定为线性,而稳态问题解决考虑到了重力的影响时,将忽略集中质量的重力影响。因此振荡衰减的情况下,这种影响基本上可以从一开始就消除。梯架在由Z = 0平面上力矩M(t)引起梯架旋转的平面内移动(如图2)。 L是梯子的长度,是旋转的角度,w(z,t)表示弯曲。M p和 J p表示乘客厢的质量,以及铰接臂、或乘客箱换算成相对于质点重心转动惯量的质量。假设角速度为较小,其哥氏力可以被忽略,梯架可以用以下偏微分方程得到的伯努利梁的分布质量来表示,同时,就时间二阶导的所有加速度而言,另外考虑梯架围绕旋转角度的旋转:
【0033】式(7)是描述弯曲的偏微分方程。 E是弹性模量,I是梯架区域的惯性矩,是密度,S是梯架的(等效)横截面面积。
【0034】公式(8)-(9)是相应固定梁端在梯架z = 0平面起始位置的边界条件。
【0035】公式(10)和(11)是在分布和集中质量之间相应转换情况的边界条件,方程(10)表示力矩的平衡,(11)表示力的平衡。
【0036】为了简化,介绍以下表示梯架各点在惯性区运动的变量为:
【0037】因此,根据方程7-11系统表示为:
【0038】为了简化,介绍以下输入值:
【0039】不考虑驱动系统的动态。根据以上输入值,力矩M(t)可根据以下公式快速计算得到:
为梯架(15)的转动惯量。
【0040】公式(12)-(16)的结果可以下列形式表示:
其中V I(Z,t)是一般解V(Z,t)的部分,其根据公式(13)-(16)只需要满足非均匀边界条件,而V H(Z,t)必须同时满足均匀边界条件和公式(12)。以下被选为V I(Z,t)的解决方法:
其中:
【0041】由式(13)和(14)知其遵循:
【0042】为了满足边界条件(15)和(16),必须解出以下方程组:
【0043】式(20)有明确的输出结果:
【0044】在公式(19)中用到的解决方法,现在用于公式(12)-(16)。将得到以下方程组:
【0045】以下替代用于简化:
【0046】以下方法用于求齐次解:
【0047】如果将式(27)用在式(21)的齐次部分,可以得到:
【0048】接下来,假设一组函数
可以满足式(28)和边界条件公式(22)-(25)。式(28)可写为:
其中,
lambda;n是相关的固有值。
以下从式(29)可以系统的表示时间函数T n(t)振幅的微分方程,
其中:
lambda;n是相关固有值。
用式(29)和方式(27)在式(22)-(25)中的应用,可以系统的表示以下位置固有函数Z n(z)的边界值问题:
【0049】用公式(24),在式(34)-(35)中的剩余时间函数T n(t
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152301],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

