
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于桥式气动节能回路的气缸摩擦特性研究
摘要:桥式节能回路是一种新型的气动系统,它使用四个开关阀控制两个气缸腔的进气和排气。它通过四个控制阀的打开和关闭顺序来节省能量。气缸摩擦是影响桥式气动节能回路精度和稳定性的关键因素。本文着重研究电路的摩擦特性。基于摩擦理论和经典的Stribeck模型,建立了电路系统中气缸的复合动摩擦模型,并建立了气缸摩擦测试平台。Nelder-Mead算法用于通过活塞移动时摩擦力和速度之间的关系来识别模型的静态参数。通过与传统摩擦模型的比较,实现了带有误差分析的摩擦模型验证。通过在一定条件下进行节能电路实验,证明了复合动摩擦模型的有效性。最后,与现有的摩擦模型相比,该模型的有效性被证明适用于不同的工况。
关键字:桥式气动节能回路,复合动摩擦模型,气缸摩擦,参数辨识
1.介绍
随着科学技术的飞速发展,气动伺服系统和设备已广泛用于工业领域,例如汽车生产线,冶金以及化学和食品工业[1,2]。但是,压缩空气的能源效率低是一个明显的问题。气动系统的能源效率仅为20%,其余80%的能量转换为热能或因泄漏而损失,这导致压缩空气的成本非常高[3]。
因此,如何节能是一个挑战。许多学者都集中在这个问题上。根据气动系统中能量传递和转换的过程,已经在空气压缩机,气动管道以及控制组件和执行器领域提出了节能方法[4–6]。
桥式回路是研究人员提出的一种新型的气动节能回路。回路的节能原理是利用来自压缩空气的膨胀能量。Yu-sop [7]分析了气动控制系统,并指出空气可压缩性将给结构带来诸如低刚度和非线性特征之类的复杂性使得其难以控制精度。Doll[8] and Harris[9]都研究了桥式电路。他们的目标是在特定边界条件下将空气的损失降至最低。将四个阀门的开关状态视为控制变量,将节能问题转化为非线性动态优化的过程控制问题。前者通过内点法求解,以获取四个阀门的开关顺序,而后者通过遗传算法求解。但是,在这两个参考文献中,摩擦都被认为是线性的,并且被建模为库仑和粘性摩擦的组合。摩擦模型不完整,不满足四个阀的开-关顺序的精度控制要求。因此,本文主要关注电路的摩擦特性。
分析气动系统的摩擦是一个复杂的挑战。在研究气动节能系统时,大多数学者使用线性模型进行摩擦。Xiangrong Shen提出了一种通过旁通阀的空气回收和再利用回路,只考虑了粘性摩擦[10]。Jihong Wan介绍了一种节能电路其进气和排气由两个比例阀分别控制,并且还采用了粘滞摩擦[11]。Yang[12]和Blagojevic [13]研究了具有库仑摩擦,粘滞摩擦和静摩擦建模的气动伺服系统。过去,人们认为任何气动节能系统中的摩擦力仅是恒定或速度的函数。但是,许多因素会影响气缸的摩擦力,例如进气压力,排气室压力,速度和润滑条件,从而导致复杂的变化规律和非线性关系。因此,线性摩擦模型不能满足气动回路控制的精度和适用性。近年来已经提出了几种动态非线性摩擦模型。Kobayashi S和Huang J提出了一种基于多段函数分段拟合方法的气缸摩擦模型[14,15]。Jun Huang用Stribeck模型处理圆柱体的慢速运动[16]。Deyuan Meng和Xiang H均使用LuGre摩擦模型来描述汽缸的运动控制,其中考虑了汽缸运动过程中两个接触面的主要特征[17,18]。动摩擦是准确的,但仅在传统电路中使用
本文着眼于桥式气动节能回路的摩擦特性。在[8]和[9]的文献中,摩擦被认为是线性的,并且被建模为库仑和粘性摩擦的组合,这是不完全的,并且不满足四个阀的开-关顺序的精确控制要求。为了解决这个问题,提出了一种基于桥式气动节能回路的复合摩擦模型。第2节介绍了桥式气动节能系统的模型和优化。在第3节中,我们基于摩擦理论和经典的Stribeck模型,提出了电路系统中气缸的复合动态摩擦模型。第4节介绍了气缸摩擦测试平台和摩擦模型的参数识别。最后一部分介绍了摩擦模型的验证,相关的误差分析以及使用节能电路的实验。
2.建模与优化
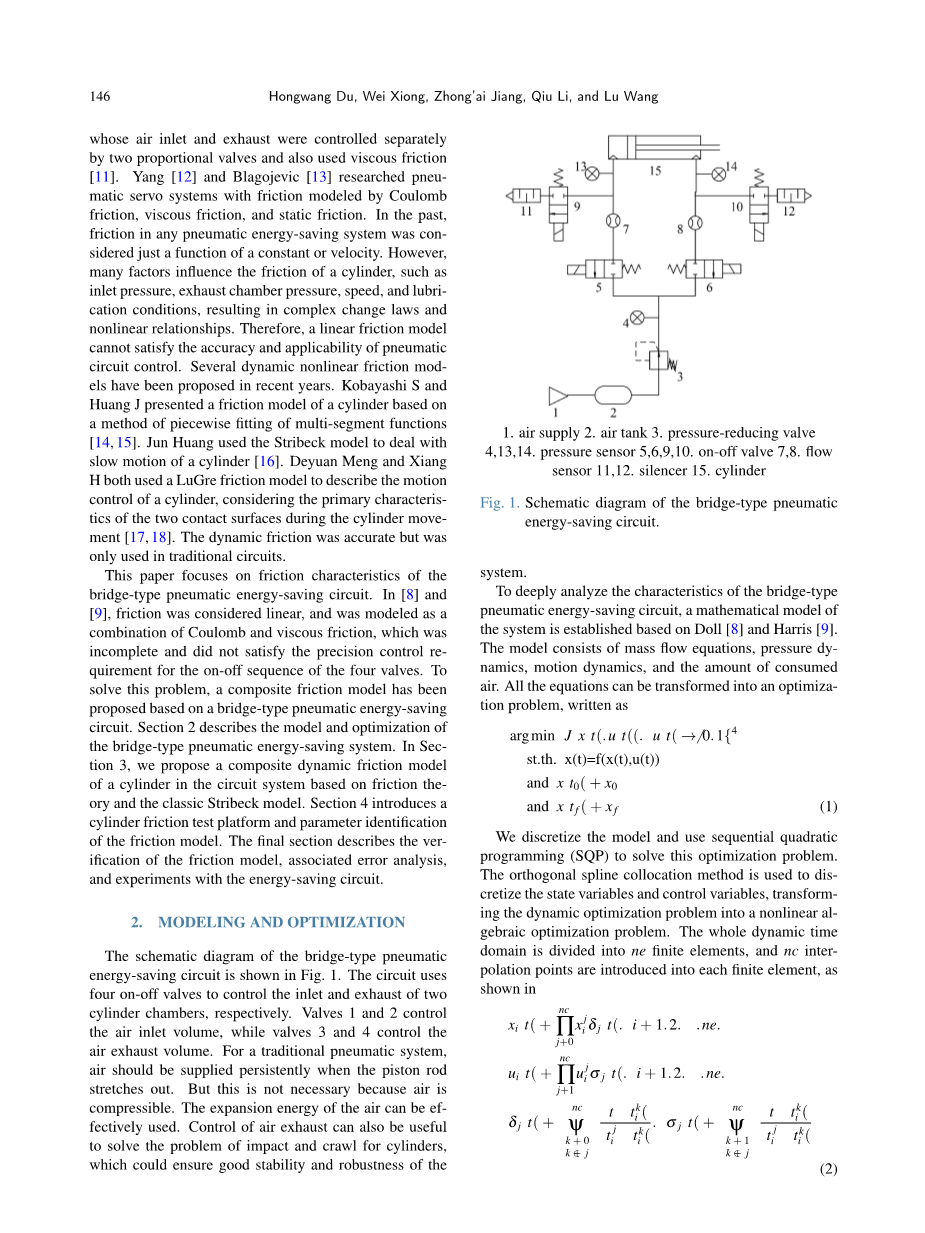
桥式气动节能回路的示意图如图1所示。该回路使用四个开关阀来控制两个的进气和排气系统。阀门1和2控制进气口容积,而阀门3和4控制排气量。对于传统的气动系统,当活塞杆伸出时,应持续供气。但这是不必要的,因为空气是可压缩的,能有效利用空气的膨胀能。控制排气对解决气缸撞击和爬行问题也是有益的,这可以保证气缸的良好稳定性和坚固性。
1.气源2.气罐3.减压阀4,13,14。压力传感器5,6,9,10。开关阀7,8。
流体传感器11,12。消音器15.气缸
图1.桥式气动节能回路的示意图
为了深入分析桥式气动节能回路的特性,建立了基于Doll [8]和Harris[9]的系统的数学模型。该模型由质量流量方程式,压力动力学,运动动力学和消耗的空气量组成。所有方程都可以转化为一个优化问题,写为
我们离散化模型,并使用顺序二次规划(SQP)来解决此优化问题。正交样条搭配法用于离散状态变量和控制变量,将动态优化问题转化为非线性代数优化问题。整个动态时域被划分为n个有限元,并且nc插值点被引入到每个有限元中,如图所示:
通过离散化,优化问题采用以下形式:
非线性优化算法可用于解决问题3。内点法或SQP算法通常可用于这种模型,因为它具有较低的自由度和稀疏结构。我们选择SQP是因为通过空间分解技术可以大大减少存储空间和计算需求[19]。
要使用SQP,我们会转换(3)成:
SQP的原理是解决一系列二次规划(QP)子问题以获得最优解。对于迭代点,QP子问题可以表示为
其中d是搜索方向。 在该算法中,采用一维线性搜索方法寻找搜索步骤;g是f的导数;A表示约束c的Hessian矩阵; W代表拉格朗日函数的Hessian矩阵。
因此,SQP的搜索方向是雅可比矩阵A(Y=times;m)和零空间搜索方向Zntimes;(N=m)的值空间方向之和,满足以下:
基于以上所述,问题(1) 转化为一系列具有变量pz的nm尺寸的QP问题。如果可以解决所有QP问题,我们可以获得四个控制阀的开闭顺序。在本文中,所有算法都是在TOMLAB优化环境中用MATLAB实现的[20]。
3.摩擦模型
摩擦在所有机械系统中都很常见。摩擦力是任何两个接触面的切向力,它们具有相对运动或运动趋势。通常,摩擦会给系统带来负面影响,因此应该尽可能消除其影响。从接触力学的角度来看,摩擦力Ff具有以下类型。
- 库仑摩擦模型
其中fc是库仑摩擦,v是速度。
- 粘滞摩擦模型
其中C是粘滞摩擦系数。
- 静摩擦力模型
其中fs是最大静摩擦
- Stribeck摩擦模型
其中Vs是Stribeck速度,其值在0.0001-0.1 m / s的范围内,而delta;是任意指数,其值在0.5-2的范围内。
- LuGre摩擦模型
其中z是微凸体的接触表面的平均偏差;sigma;0是微变形的刚度系数;sigma;1为阻尼系数;sigma;2为粘滞摩擦系数。
这五个摩擦模型中的前四个属于准静态摩擦。摩擦被描述为具有简单形式的速度的函数,不能在非线性动力系统中使用。LuGre摩擦模型是一种动态模型,具有速度和位移形式。能准确反映各种摩擦效果;但是,该模型过于复杂,无法计算和表达。
基于上述因素,单个模型很难准确地描述气动系统的摩擦。通常,使用库仑摩擦力和粘滞摩擦力之和来描述摩擦力,在本文中我们将其称为传统摩擦模型。
但是该模型不适用于桥式气动节能电路,因为该电路本质上是伺服控制回路。因此,需要一个更合适的摩擦模型来获得控制阀的准确打开和关闭顺序。本文将摩擦建模为库仑摩擦、粘性摩擦,静摩擦力,Stribeck摩擦。该模型可以更全面地捕获润滑条件下气动系统接触表面的响应摩擦特性。模型公式为:
其中,mu;是动摩擦因子,而ve是临界速度。
在此模型中,Stribeck速度和任意指数共同决定了摩擦和速度之间的关系。活塞克服最大静摩擦并开始运动后,摩擦将减小。该现象体现了模型中的Stribeck摩擦衰减指数。当速度上升时,摩擦力将增加,这取决于粘滞摩擦。当达到临界速度时,摩擦完全取决于动摩擦。模型中的参数由许多因素决定,例如气缸和活塞的材料,供应压力和运动速度。因此,参数识别用于确定详细的摩擦模型。
4.摩擦测试平台
当活塞伸出时,无杆腔会吸入空气,而杆腔会排出空气。气缸活塞的机械分析如图2所示。
活塞的运动学方程如下
其中M是负载质量(kg),v是活塞的速度(m / s),PA是进气压力(MPa),SA是进气室的横截面积(m2),PB是排气压力(MPa),SB是排气腔的横截面积(m2),Ff是摩擦力( N)。
当活塞不受外力影响并以恒定速度运动时,系统摩擦仅由两个腔室和两个横截面的气压反映出来。如果已知横截面积,则可以通过压力传感器获得气压。
因此,如果已知具有不同速度的两个腔室的气压,则可以获得摩擦与速度之间的关系。
基于桥式气动节能回路,建立了摩擦试验平台。与传统回路相比,使用了四个二位和二通阀代替了三位和五通阀。四个阀用于控制两个气缸室的进气和排气,通过控制阀的开启和关闭顺序来节能,摩擦测试平台如图3所示。实验仪器和设备规格如表1所示。
图2.气缸活塞的力学分析
图3.摩擦测试平台
|
名称 |
规格 |
|
|
1 |
圆筒 |
D = 63毫米,L = 600毫米 |
|
2 |
气压传感器 |
0-1 MP,输出:1-5 V |
|
3 |
开关阀 |
2位2通 |
|
4 |
流量计 |
范围:10-1000 l / min |
|
5 |
航空服务单位 |
过滤器,减压阀 |
|
6 |
位移传感器 |
范围:1000毫米;0.0015%FS |
|
7 |
导轨 |
L = 1500毫米 |
|
8 |
数据采集卡 |
16通道,12分辨率 |
表1.实验设备规格
所有实验信号均通过传感器采集来测量,这是设计程序以保存实验数据所必需的。同时,必须开发另一个程序来控制四个阀门。这些程序是使用LabVIEW软件实现的。使用模块化编程,可以同时发送获取的数据和控制信号。传感器和换向阀通过具有短路保护功能的PCI-1710HG采集卡连接至工业计算机。系统控制电路原理如图4所示。
图4.系统控制电路原理
5.摩擦模型的参数识别
建立参数识别以根据实验数据和模型确定一组参数值。这使得通过模型计算得到的数值结果最适合测试数据,可以为预测生产过程提供一定的理论指导。参数识别问题是反问题。该模型在解释实际问题时的可信度取决于参数估算的好坏。在某些条件下(空气压力和速度),根据以下公式计算摩擦值:(14).的参数(13) 然后确定。
从(13), 我们知道摩擦和速度之间存在非线性关系。我们尝试使用非线性最小二乘法来解决它[19],但是解决方案很难实现。因此,我们在本文中使用Nelder-Mead算法[20]。这是一种直接搜索非线性优化方法[21]。构造初始单纯形是必要的,它通过反射,扩展以及内部和外部收缩[22]。算法流程图如图5所示。在设计算法中使用的参数可以参考[23]。
图5. Nelder-Mead算法的流程图
根据算法,参数为(13) 可以通过以下步骤获得。
资料编号:[237074],资料为PDF文档或Word文档,PDF文档可免费转换为Word
- 构造初始单纯形 剩余内容已隐藏,支付完成后下载完整资料

