
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
ROMERIN:用于基础设施检查的模块化爬壁机器人
摘要:本文介绍了用于基础设施检查的模块化攀爬机器人的构造所取得的一些进展,并展示了每个支路的独立真空发生器的开发与优化系统,且流量优先于相对压力。它还描述了一般的机器人结构,以及基于仿生有机模型开发控制系统所需的初始数学模型。最后,本文强调了使用模拟器来帮助迭代设计过程。
关键词:爬壁机器人,真空涡轮机,模块化机器人,流体模拟
1.介绍
在过去的半个世纪中,民用基础设施的增长特别激烈。 因此,这些相同设施需要不断增加费用来检查,更换,或在必要时拆卸。欧洲联盟SPARC进行的分析(euRobotics)强调在未来几年中,这项任务将变得越来越重要和相关,并且预见到机器人将在维护,检查和拆卸中扮演至关重要的角色。此外,检查是一项特别结构化的重复性任务,需要在操作过程中长期注意,并且在许多情况下,它涉及将操作员置于危险情况下,这就是为什么机器人技术被誉为一种直接应用的技术。
实际上,如果你查看IFR,JIRA,euRobotics的报告,它们都表明了当今机器人市场(尤其是无人机,UAV,UUV和UGV)的爆炸性增长。 去年,主要由无人机驱动的服务机器人的数量增加了25%,在非制造环境中的自动驾驶汽车的数量在一年内增加了51%.
本文介绍的机器人系统(ROMERIN)旨在设计可以在垂直表面上甚至在天花板上移动的爬壁机器人。与某些现有开发不同,该机器人在每个吸盘上都使用一个涡轮来产生所需的负压。 与泵相反,使用涡轮机具有的主要优点是流量大,因此即使在存在裂纹或缺陷或在粗糙表面上,其可接受的粘附能力也是如此。每条腿都独立产生吸力这一事实避免了当机器人中的某个吸盘放置在空气过多损失的地方时整个机器人的压力损失的影响(Schmidt,2013b)。最后,同样重要的是,这种结构允许开发模块化机器人,其中一条或两条腿可以形成一个机电独立的单元。
目前已经有以某些基础设施上执行特定工作为目的的爬壁机器人的设计,这些任务可能对操作人员有风险,或者可能要求精确度很高,例如:(Schmidt,2013)
- 检查运行中的风力发电机
- 清洁大型建筑物的窗户
- 飞机机身和船体分析
- 修订,拆卸以及核电站的拆除
- 检查大型建筑物,隧道,冷却塔和大型基础设施
在过去的几年中,相当多的爬壁机器人已经被开发出来,可以在(Miripour,2010年)中找到所涉及技术和不同方法的完整摘要。 这些机器人可以基于两个原理进行明显区分:它们所基于的运动类型和所使用的粘附系统。大多数爬壁机器人都是基于真空系统的使用,或者是在金属结构上工作时的磁性。最近基于壁虎(Kasem,2015)或微型脊柱模仿静电系统的设计激增,值得注意的是,该系统采用了捕获表面粗糙的微型棘刺阵列(Kalouche
2014)或者干胶(Xu 2018)。与我们的开发类似,RVC(Reconfigurable垂直攀爬机器人),这是一种模块化机器人,在垫中使用永磁体来检查复杂的铁磁结构(Peters,2010年)。当今存在的另一种大的趋势已被成功应用于计算机,清洁机器人是使用人体附着系统(通常通过涡轮或再生真空泵进行抽吸)以及独立的运动系统,例如车轮被动地保持与表面的接触。
Figure 1六足动物原型附着在粗糙的石膏墙上
如上所述,ROMERIN的最终目的是开发具有特定功能的模块化爬壁机器人在基础设施中执行检查任务的应用。然而,我们不知道爬壁机器人每条腿的真空产生量,也没有连接的纽带,并且更有趣的是:模块化。在该项目中提出的模块化,尽管带来了开发与可变元件配合使用的控件的复杂性,却具有非常相关的实际目的,并且有可能根据应用的类型、自主控制和携带的有用负载来增加负载能力和抓地力。
最大的复杂性在于处理一种必须基于模型的控制,并且由于缺乏抓地力,姿势和地形配置,因此必须将生成周期性图案的策略与所需的校正方法结合起来。
该项目包括几个阶段,包括设计,开发和建造演示机器人,以及在真实环境中进行测试,例如隧道检查任务和检查核电站冷却塔。应该指出的是,鉴于环境条件和所需的检查系统,这些检查任务不能通过无人驾驶飞机来执行(由于它们有限的负载能力,使用的飞行系统固有的不稳定性质以及事故风险)或严格意义上的地面飞行器(受它们可以移动的地形类型的限制)。
由于这个原因,开发过程被安排在一个交错的方式,它从一个基于商业平台的雏形开始,并大量使用当前的动态仿真系统。之后,再解决我们自己的模块化系统的开发问题。
因此,我们修改了一种由XYZ机器人公司(XYZ Bolide Y-01)所营销的机器人,对该模型进行了机电一体化修改,以使其附着在墙壁上(图1)。本文展示了吸盘设计,抓取系统的建模和优化方面的一些进步。
文章的结构安排如下:首先,第一个原型是以一般方式描述,接下来,介绍了为实现真空发生系统中的最大效率而进行的部分理论和有限元优化,以及一些允许对其进行验证和优化的实验。随后,描述了数学模型,该数学模型允许实时获取吸盘中的抓附力的近似值,以实现与可变数量的支脚的超静接触。 最后,通过动态仿真验证结果。
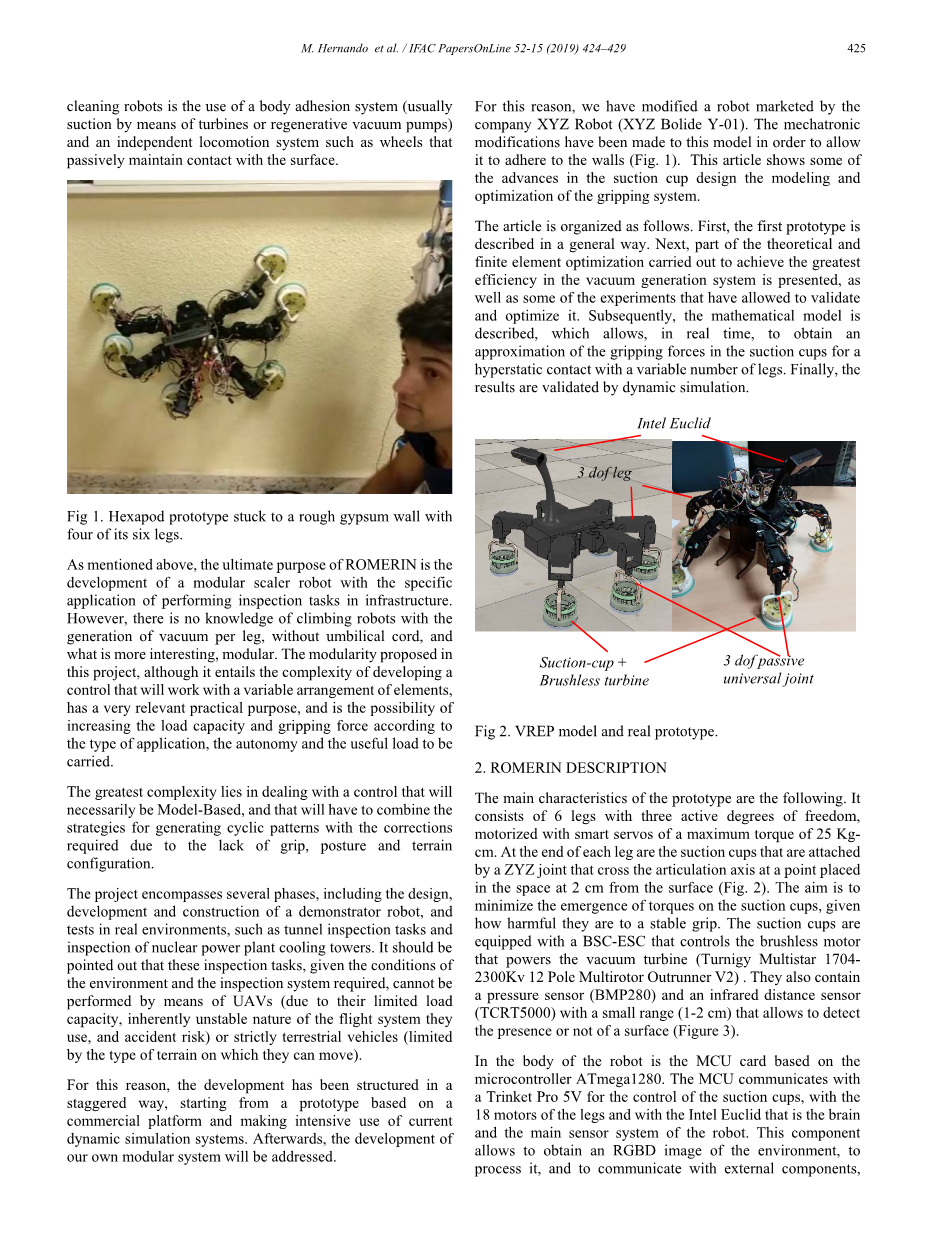
Figure 2 VREP模型和真实原型
2. ROMERIN说明
原型的主要特征如下:它由6条腿和3个主动自由度组成,
采用最大25 Kg·cm的最大扭矩的智能伺服电机驱动,每条腿的末端都装有吸盘,这些吸盘附着在跨越放置点处(即在距表面2厘米处的空间中)与关节运动轴交叉的ZYZ关节上(图2),鉴于它们对稳固的抓握的有害程度,其目的是使吸盘上出现的扭矩最小。吸盘配有BSC-ESC,该BSC-ESC控制为真空涡轮机提供动力的无刷电机(Turnigy Multistar 1704-2300Kv 12极Multirotor Outrunner V2)。它们还包含一个压力范围(1-2厘米)的压力传感器(BMP280)和一个红外距离传感器(TCRT5000),可以检测表面的存在与否(图3)。
机器人的主体是基于微控制器ATmega1280的MCU芯片,MCU与用于控制吸盘的Trinket Pro 5V,腿部的18个电机以及与机器人的大脑和主要传感器系统Intel Euclid通信。该组件允许获取环境的RGBD图像,并对其进行处理并与外部组件进行通信,因为它包含功能强大的处理器(Intel Atom x7-z8700)以及Ubuntu 16.04和ROS。 机器人由LiPo3S 5500mA电池驱动。
描述了机器人之后,我们将专注于粘合系统,以及真空的产生。
3.真空的产生
Figure 3每条腿的真空系统和吸盘(左)的3D模型以及建造原型,右图显示了吸盘中包含的传感器
每条腿的末端都装有吸盘,以粘在墙上或其他任何非水平表面(图3)。为了产生所需的真空,每个吸盘都配备有自己的涡轮机和电机。涡轮机及其周围的定子均由3D打印机打印,因此很容易修改系统设计以找到最有效的几何形状,这意味着必须优化涡轮机的设计,以便将压力尽可能降低,这样,可以限制旋转速度以减少为它们供电所需的功率。
通过研究真空吸尘器涡轮的设计,第一个模型根据定子的尺寸和心中设计的吸盘而制作出来。涡轮机的直径和高度仍然可以调节,但是由于履带机器人的腿靠在一起,设计不能太宽,否则行走时吸盘会重叠。
Figure 4一些涡轮经过了测试,叶片的数量、长度、倾斜度、高度等已是修改参数的示例。
第一个涡轮设计有十个叶片,直径为40毫米,总高度为10.8毫米。刀片向后弯曲,并且它们从前板到后板也弯曲。从这种设计开始,对一组修改进行了测试,以改善涡轮机(图4)。这包括涡轮的尺寸,叶片数量或叶片形状。初始涡轮机的有效系数为1.53(mbar / Watt),在优化过程结束时,我们获得了1.8的系数,即提高了17%。
3.1 ANSYS FLUENT仿真优化
要找到这些改进方法而不必总是重印设计和测试它,我们使用了Ansys Fluent程序。该方法允许用户测试涡轮的几种设计并相互比较,就压力方面找到最有效的设计。
Figure 5两种不同的流线的图形表示涡轮,倾斜叶片(左)与直叶片(右)
由于详细信息,我们也可以改进设计,这样程序可以产生显示的压力并且流量不可能通过实验来测量或可视化。从学术角度来看,它还使我们能够了解造成最终压力的一些影响在这些特征的系统中以一种或另一种方式表现。例如,在仿真和实验中,已经证明,笔直刀片的压力比倾斜刀片要低(相对于旋转轴)。当可视化流线时,我们可以获得这种现象的原因。如果叶片弯曲,气流将被推向后板,从而降低了速度(图5)。当刀片笔直时,情况并非如此,
流线集中在涡轮机的中间,并流向定子。结果表明,直刀片的压力更好(增加了21%)。
Figure 6涡轮叶片的数量对压力/功耗没有重大影响。
仿真器给出的另一个令人惊讶的结果是,叶片数量(从8到12个)对性能和所获得的相对压力几乎没有影响,图6显示了压力随时间的变化。
3.2实验优化
考虑到模拟系统的特性,我们有必要对结果进行实验验证。显然,进行的实验次数要少得多。 有趣的是,观察如何通过实验来验证模拟产生的结果是正确的。 图7显示了直刀片对倾斜刀片的最佳性能。
Figure 7Ansys Fluent仿真结论的实验验证,垂直刀片比倾斜刀片更有效。
此外,实验还提供了消耗和效率的真实值,如表1所示。数据显示,一个吸盘能够产生15牛顿的功率,而消耗仅为12瓦。
Table 1其中一个实验的实验结果
我们已经进行了40多次不同的测试以获得足够高效的真空系统。
4.机器人模型
4.1 VREP动态建模
为了测试和验证实施的安全性,在V-REP模拟器(虚拟机器人实验平台)中构建了一个模型。这是由Coppelia Robotics开发的,是当今功能最强大,用途最广泛的模拟器之一,它与多种编程语言兼容,例如C / C ,Python,Matlab,Lua或Java。此外,它还允许您通过多种工具(例如ROS节点,插件或脚本等)分别控制仿真的每个对象。
Figure 8在VREP中模拟的机器人显示RGB-D虚拟英特尔Euclid的捕获
除其他外,VREP支持机器人的动态仿真,这包括实现具有饱和度,PID,最大速度等的电机控制器的可能性。除其他功能外,还可以模拟吸盘以及握把的摩擦力,并记录反作用力。它还能够模拟复杂的传感器,例如RGB-D相机或激光器。图X显示了已建立的ROMERIacute;N模型以及由模拟EUCLID进行的捕获,该捕获已在VREP中基于另一个传感器(Kinect)进行了建模。
尽管它基本上用于测试不同的运动策略,但在这种情况下,VREP模型将验证下面解释的数学模型(图8)。
为了优化我们计划实施的仿生控制类型,该模型被认为是必不可少的。
4.2接触力的数学模型
攀爬时控制机器人的一个关键方面是,考虑到失去抓地力的风险,确保吸盘上的法向力和剪切力不会超过一定极限(Ko,2017)。 在我们的案例中,考虑到可能存在许多使系统超静态的接触点,这一问题甚至更加复杂。原则上,要解决该问题,有必要考虑机器人肢体和电机的弹性特性,这会使系统过于复杂而无法包含在机器人的控制回路中。因此,我们寻求一种简化的数学模型,使我们有足够信心能够确定释放哪条腿以及将其放置在何处,并告知在一个方向或另一个方向上移动机器人重心的便利性。
为了获得吸盘中反作用力的静态模型,考虑到问题的高静态性,我们决定使用简化的动态模型。 假定的简化假设如下:
- 机器人腿部被认为是刚性的,不可变形的。
- 在吸盘中,由于采用万向节固定,因此只会产生反作用力,而不会产生扭矩。
- 为了解决高静态性,将假定接触点是弹性的,常数为K。
Figure 9反应中使用的元素会强制建立动态模型
通过这些假设,我们可以以相对简单的方式获得每个吸盘中的载荷分布的近似值。 在没有外力的情况下,机器人的重心位于初始为零的??⃗点(图1)。
由于重力和支撑点的反作用,重心根据?R=(??,PR)移动和旋转。其中??isin;?O(3)和?Risin;R3分别是方向矩阵和重心相对于初始位置的新位置的位置矢量(图10)。
在这些前提下,为了使系统稳定,必须满足静态平衡方程:
sum;Fl Mg=0 sum;?=0
Figure 10由于CG位移而将反作用力计算为弹性力。
根据这些假设,每个吸盘的反作用力?l从而可以从以下获得:
另一方面,应用力矩平衡方程:
用力方程可以简化:lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235846],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

