
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
汽车电动助力转向装置试验台的智能优化
摘要汽车转向系统是用来改变方向,保持车辆直线行驶。电动助力转向系统(EPS)可以提高车辆的操控性能和经济性,已成为对现代汽车转向系统的研究和开发的热点。蜗轮蜗杆传动是电动助力转向系统的重要组成部分;它的传输效率将直接影响传输效率和电动助力转向系统的复位能力。因此,采用优化方法对设计电动助力转向系统非常重要。建立模糊优化模型去设计EPS。最佳水平截集采用的是二级综合评价方法,从而将模糊优化转化为常规优化。这种遗传算法的缺点可以通过与基于梯度的局部算法结合来克服,这种方法因为它们的快速所结合而被认识。这种混合方法提高了算法的效率,也避免了去明确基于导数方法的好的起始点的需要。本文中阐明这种结合了遗传算法和局部算法的混合算法,并且这种遗传算法与模糊逻辑相结合可以有效地找到一个更准确的解决方案。
关键词智能优化;电动助力转向系统;试验台;模糊逻辑
一、介绍
汽车转向系统是用来改变方向,保持车辆直线行驶。根据不同的旋转能量,转向系统可分为机械转向系统和动力转向系统。动力转向系统变得越来越普遍,不仅重型车和轿车配备有转向系统,而且在应用中的中型汽车也逐渐使用。电动助力转向系统(EPS)可以提高车辆的操控性能和经济性等诸多优点,已成为现代汽车转向系统的研究和开发的热点。因此,电动助力转向系统被广泛应用。
汽车电动助力转向系统的蜗杆传动装置是电动助力转向系统的重要部件,其传动效率将直接影响传输效率和电动助力转向系统的复位能力。因此,采用优化方法对于设计电动助力转向系统非常重要。考虑到油传统优化方法所造成的效率低下和局部最优问题,解决电动助力系统的优化模型是采用这种混合遗传算法,并考虑设计参数取值的随机性和和一些像是承载性能和材料质量等参数非常不确定的因素,模糊约束被建立起来。因此,简化优化流程,确保可靠地获得全局最优解。
二、智能优化的基础算法
遗传算法根据的是生物进化的过程和达尔文的自然选择的概念。在此次选择中,只有适者生存而坏的种群被淘汰。在这个过程中,一些自然过程中的交叉、变异、自然选择被用来选择最佳的种群。同样的概念推广到数学优化问题,就是只选择好的设计点,而坏的设计要点是被淘汰。在设计优化中,目标函数通常被称为适应度函数,并且“适者生存”的过程表明着最大化的过程。
这种方法的优点是搜索从种群到种群而不是点对点,这使得它更不容易陷入局部最优。而种群也保留了一些有效的解决方案,而不是淘汰到只有一个。由于所需的目标函数数量较大,所以缺点便是计算时间过长。然而它比随机游走或穷举搜索算法更有效。[ 1 ]
遗传算法与标准算法的不同体现在两种主要方式,总结如下:(1)产生在每一次迭代点群。这个种群接近最优解。(2)通过涉及随机选择的计算法来选择下一代种群。因此你可以应用遗传算法来解决各种不适合标准的优化算法的优化问题,包括问题的目标函数是不连续、不可微的,随机的,或高度非线性。[ 2 ]
三、电动助力转向系统的模糊优化模型
设计样本:一个渐开线蜗杆传动是采用EPS,其主要参数如下:输出转矩T2 295.87n m,输出速度
N2 28.4 r/min,齿轮比U 49.3,工作负荷
K 1.05。蜗杆加工和热处理45钢和齿轮的齿科罗娜啤ZQAl 9 4 。单速主减速器
应用于汽车,其结构是圆柱齿轮,其主要参数如下:输入扭矩T = 100Nbull;m,工作负荷系数K = 1.08,齿轮比U = 4.33。双向传输,非对称布置,齿轮材料:pinion-40cr,淬火和回火,gear-45钢,淬火温度
A.建立EPS目标函数
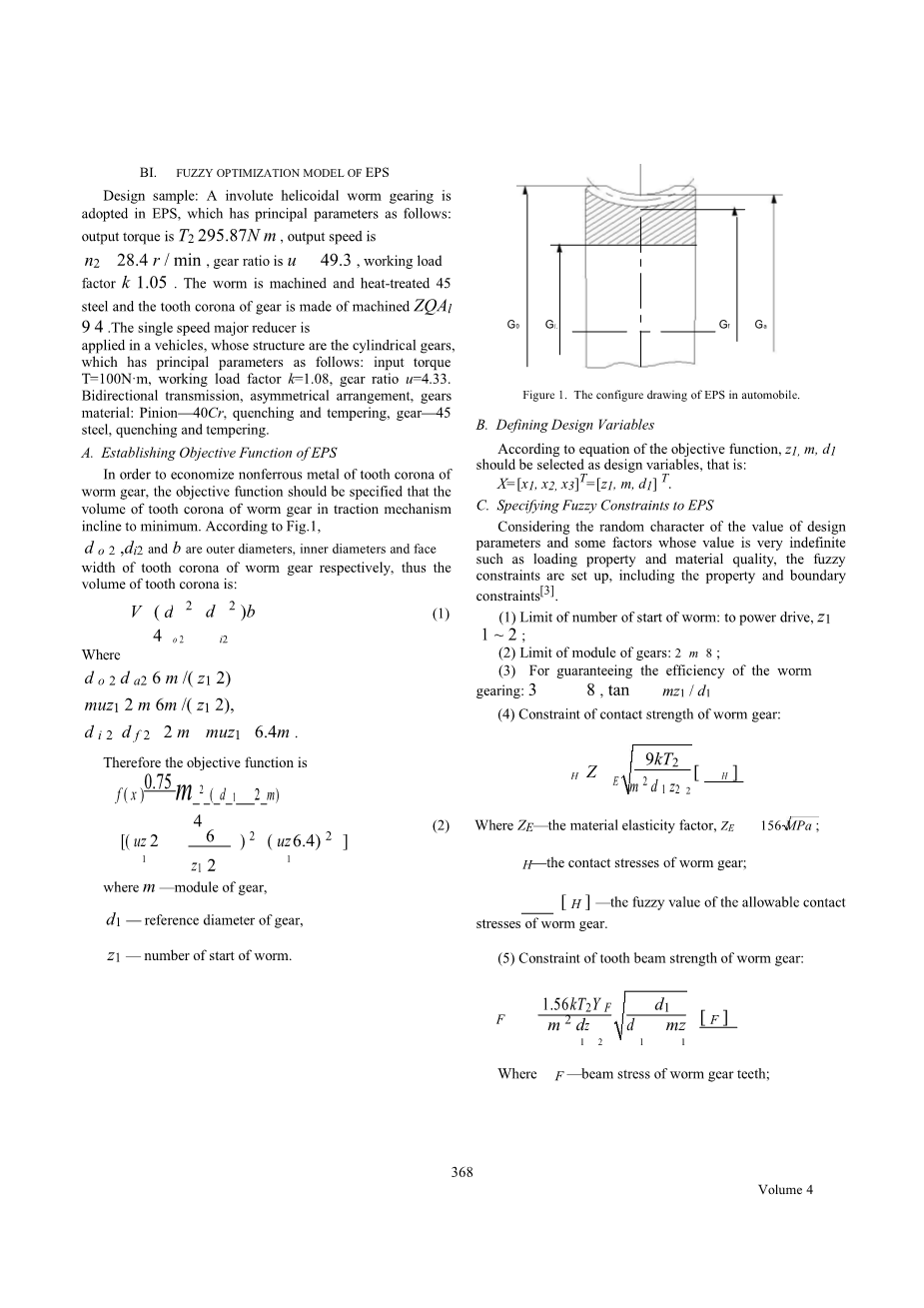
为了节约蜗轮齿科罗娜啤酒有色金属,目标函数应规定,在牵引机构倾斜蜗轮齿科罗娜啤酒最小体积。根据图,
D O 2、DI2和B的外径,内径和脸
对蜗轮齿宽分别科罗娜啤酒,因此牙齿科罗娜啤酒体积:
V(D 2 D 2)B(1)
4 O 2 I2
在 哪儿
D 2 D A2 6米/(Z1 2)muz1 2 m 6m /(Z1 2),
D我2 D F 2 2米muz1 640万。
G0
GL GF GA
图1。配置汽车EPS图。
B.确定设计变量
根据目标函数,方程Z1,M,D1
应作为设计变量,即:
X = [ X1、X2、X3 ] = [ Z1,M,D1 ] T.
C.指定EPS模糊约束
考虑到设计参数取值的随机性和一定的价值很不确定的承载性能和材料质量等因素,模糊约束条件的设置,包括性能和边界约束[ 3 ]。
(1)对启动蠕虫人数限制:电力驱动,Z1 1 ~ 2;
(2)模块齿轮的限制:2米8;
(3)为保证蜗杆的效率
传动装置:3 8,谭MZ1 / D1
(4)对齿轮接触强度的约束:
因此,目标函数
|
f ( x )0.75 m 2 ( d 1 2 m) |
||||||
|
4 |
6 |
|||||
|
[( uz |
2 |
) 2 ( uz |
6.4) 2 |
] |
||
|
1 |
z1 |
2 |
1 |
|||
M -齿轮模数,
D1 -齿轮分度圆直径,
Z1—
|
G0 |
||||||||||||
|
GL |
Gf |
Ga |
||||||||||
B.确定设计变量
根据目标函数,方程Z1,M,D1
应作为设计变量,即:
X = [ X1、X2、X3 ] = [ Z1,M,D1 ] T.
C.指定EPS模糊约束
考虑到设计参数取值的随机性和一定的价值很不确定的承载性能和材料质量等因素,模糊约束条件的设置,包括性能和边界约束[ 3 ]。
1、
- 对螺纹螺杆数的限制:电力驱动,Z1 1 ~ 2;
- 模块齿轮的限制:2米8;
- 为保证蜗杆的效率
传动装置:3 8,tan MZ1 / D1
- 对齿轮接触强度的约束
|
Z |
9kT2 |
[ |
] |
|||||||
|
H |
E m 2 d 1 z2 |
2 |
H |
|||||||
2、在ZE材料的弹性系数,ZE 156 MPa ;
;
H—蜗杆齿轮的接触压力;
蜗杆齿轮接触应力的武器系统的火力控制系统;
[ H ] -允许接触的模糊值
蜗杆齿轮应力。
(5)对蜗轮齿的弯曲强度的约束:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146792],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
F |
1.56kT2Y F |
d1 |
[ F ] |
<!-- | |||||||
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

