英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
设计、制造和测试一个独立的、自主的纳米航天器姿态控制系统
摘要:
本文介绍了纳米卫星和的Cubesats三轴姿态控制系统的发展,基于商业电子和能够自主地进行姿态稳定工作,或从地球控制,进行实时定位演习。该系统包含三个微反应车轮和有关的驱动器,三个磁力矩与它们的控制电路,三个磁力仪,以及电子控制设备。该系统是从主机宇宙飞船完全独立的,与包括在其结构中的所有系统。对于自主姿态控制,外部传感器需要,提供了一个参考源的方位,如太阳,最终进行评价的基础上太阳能电池阵列的输出,地球或星。所述通信接口基于串行链路上,可用于传送的命令,参数和管理数据。系统组件,并将整个装置的小型化是相对于传统的姿态控制系统的实现引入的主要创新之一,创造甚至适合于一个单位(1U)的CubeSat一个完整的系统。整个系统是一个52毫米的立方体一侧小,体重150克该系统的开发阶段中介绍,从设计参数的定义实现工作原型,重点对系统的小型化,电子设计和功能测试。
介绍
人们对于微型航天器的兴趣在过去几年显著增长。趁着电子和机载系统的小型化,超轻型飞行器的性能得到了不断增加。著名的CubeSat标准纳米航天器已被定义(Heidt等,2000年),建立一个立方体卫星模块的尺寸为10厘米的一侧,目标重量为1千克。从那时起,许多小型零件和子系统已经开发,增强了特定的小型化和性能需求。由于稀缺板载资源,纳米航天器姿态控制是传统的基于无源磁,旋磁,或重力梯度稳定。
近日,超小型卫星反作用飞轮已经发展成为三轴姿态控制系统的组成部分。一个完全新的反应轮配置已经提出(Sinclair等人,2007年,2010年),其中,传统的电动机的概念,设计用于与在所述定子的重磁铁低转子惯性,是相反的。重永久磁铁位于转子,利用该磁铁惰性质量有效地提高了车轮的惯性。这是一个非常有效的配置;但是,它需要专用的硬件制造没有考虑商用现货(COTS)技术,能够带来成本节约的优势。小型化的反应轮,直径约2厘米,已在柏林工业大学(TUB)研制,飞行在BEESat的CubeSat(卡亚尔等,2007; Briess等2011),采用商业现成的现成组件。该系统提供的反应轮,其用户将负责在自己的姿态控制系统整合。
上述的工序是一个自包含的、集成的Cubesats姿态控制系统的发展,以用作一个积木和容易集成在卫星系统,作为MAI-100微型3轴ADACS(马里兰州航天,克罗夫顿,MD)。这个单元,占据比单个单元立方体卫星的10times;10times;10厘米的体积稍小,是足够的,一般多单元的Cubesats或纳米卫星。目前,据作者所知,没有集成,三轴姿态控制适用于单个单元的Cubesats系统已经研制成功。给人一种三轴姿态控制能力,这类纳米卫星的可以大大提高其性能,并打开新的场景对高级应用。
一种超紧凑,自成一体的姿态控制系统,称为纳米卫星为(CONAN),本文介绍,主要集中在设计工艺和技术特点的姿态控制器。该系统已开发了一种具有单件的Cubesats为主要目标,但适用于较大的纳米飞船以及与提供姿态稳定,并通过使用磁力传动器和反应车轮机动能力的目标。它是非常紧凑的,被包括在尺寸52times;52times;52毫米,并完全自主,整合所有需要的资源,例如传感器,致动器,以及控制和接口电路的结构。它包含三个磁致动器,三个反应轮子,一个三轴磁力计,和一个微控制器板控制信号产生,数据详细说明,控制法的实施,和用户界面。所有子系统的已使用商用现成技术开发,剩余有限的资源范围内,并满足设计要求。该系统可自主工作实施-Bdot控制法律或实时地从地面接收指令。在系统上进行的试验确认模拟结果和设计的正确性。
系统设计
系统要求
该系统已被设计为一个独立单元,也可以在船上纳米卫星如的Cubesats安装,作为一个积木的卫星系统。它也被设计成从主机宇宙飞船独立工作,除了从电源和命令或数据交换。主要的要求是在小型化的姿态控制系统(ACS)的物理尺寸。的前缀对象是约5cm的一侧。尽管可用的小空间中的立方体,它需要包括所有此体积内的必要的ACS的子系统。无特殊要求已被固定在系统的质量和功率,只要最终的设计符合典型的CubeSat板载资源。由于用于此类卫星不成立的标准值,在驱动标准一直保持质量和功率尽可能低。
在所有系统的目标是在轨释放后提供卫星旋转和稳定所需要的硬件和软件解决方案,并提供卫星具有履行姿态机动的能力。
关于姿态控制性能的要求已经在总角动量存储和机动能力方面进行了定义。的第一个要求是最大的角动量存储对应于一个轨道的环境扭矩效应,假设最大连续扭矩和没有去饱和演习的最坏情况下的条件在此时间跨度。姿态机动要求已被固定,使得一个三重的CubeSat,具有约0.035千克平方米惯性矩,执行在不到1分钟的180°,其余到休息转弯。这对应于具有均匀的质量分布的三重立方体卫星,重达4公斤。该卫星被认为是静止的,或具有可忽略的角速度,在机动的开始,并且当机动完成它在静止再次结束。这个动作是,实际上代表在空间典型姿态机动,其中,有效载荷指出从一个目标向另一个的,它仅使用轮,而不是磁力矩来进行的,因为它的目的是为一个快速动作。
姿态控制精度约为3°,主要取决于固态磁性能。
在电子控制中,要求实行创建能够从发射被释放后,执行实时命令(如轨道机动)和自主控制(如姿态稳定)系统。
作为一个技术的实施要求,系统应该由商用现货地面组件。
反应的车轮和电动机尺寸标注
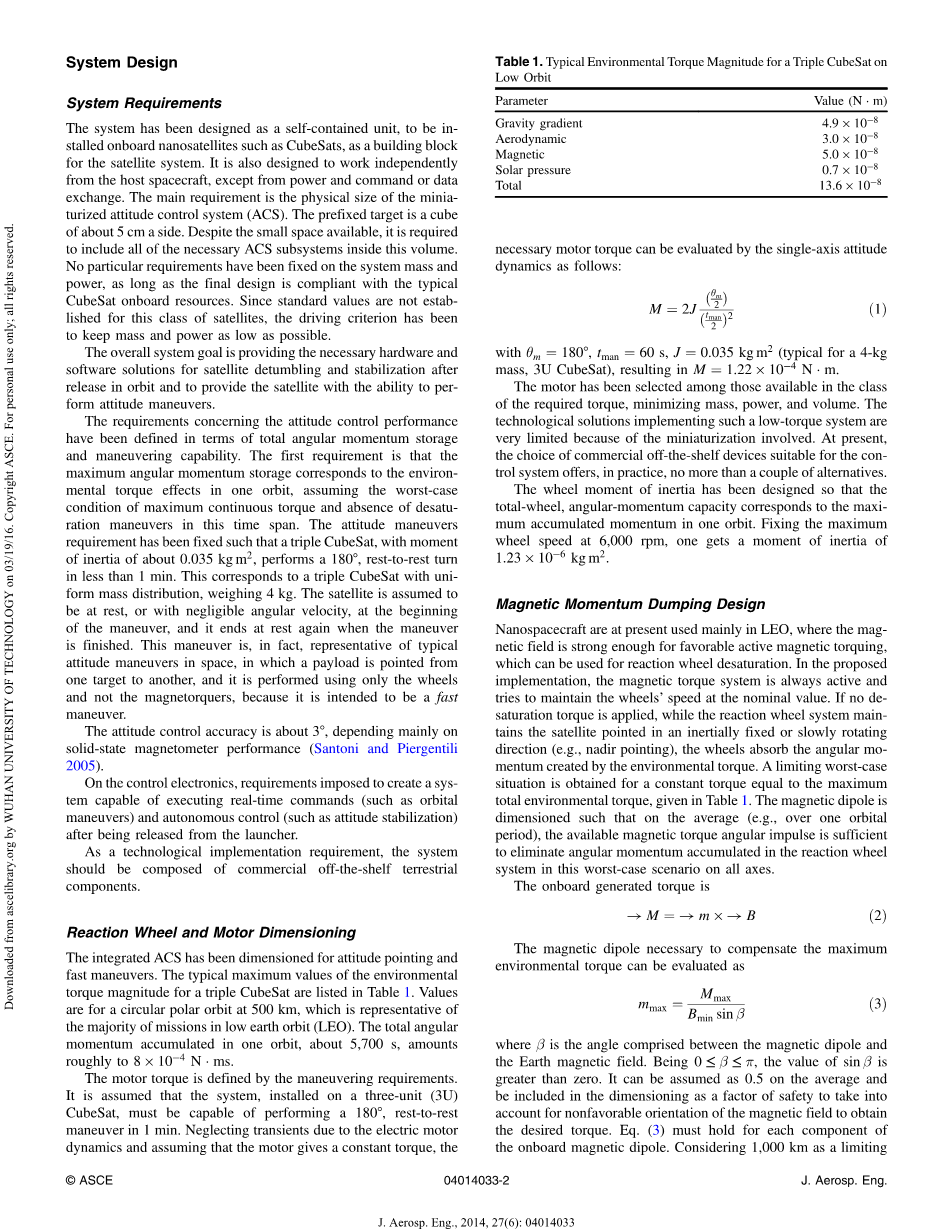
集成的ACS已尺寸为指向的态度和快速的演习。对于三重立方体卫星环境转矩大小的典型的最大值在表1所列的值是在500公里的圆形极地轨道,它是代表广大在低地球轨道(LEO)任务的。总角动量在一个轨道上积累,5700 S,相当于大约8times;10-4 N·毫秒。
电动机转矩是由机动要求限定。假定系统中,安装在三单元(3U)的CubeSat,必须能够在1分钟内进行180°,其余到休息机动。忽略由于瞬变电动机动力学和假定马达给出的恒定扭矩,所述所需马达转矩可以通过单轴姿态动力学进行评价如下:
theta;m 以frac14; 180°为单位,Tman 以frac14; 60 s为单位,J以 frac14; 0.035 kgm2为单位,M 以frac14; 1.22 times; 10minus;4 N · m为单位
电机已经在类所需扭矩的那些可用选自,最小化质量,功率和体积。实现这种低扭矩系统的技术方案是因为所涉及的微型化的非常有限。目前,适用于控制系统所提供的商业上现货供应装置,在实践中,不超过几个选择更多的选择。
惯性轮力矩被设计,使总轮,角动量容量对应于最大累积动量在一个轨道。在6000转固定的最大轮速,一个得到的1.23times;10-6 kgm2为单位的转动惯量。
磁动势倾设计
纳米航天器,目前主要用于低地球轨道,其中磁场是有利的磁悬浮扭转,可用于反作用轮饱和度不够强。在所提出的实施,磁力矩系统始终处于激活状态,并试图保持车轮“速度与标称值。如果没有施加去饱和扭矩,而反应轮系统维持卫星在惯性固定或缓慢旋转方向指向(例如,天底指针),车轮吸收由环境扭矩产生的角动量。对于在表1给出的恒定扭矩等于最大环境总扭矩时,获得的一个限制最坏情况。磁偶极子的尺寸使得在平均(例如,通过一个轨道周期)中,可用的磁转矩角冲是足以消除在反应轮系统中所有轴这个最坏的情况下累积的角动量。
板载产生的扭矩为
→ M frac14;→ m times;→ B
以补偿的最大环境转矩所必需的磁偶极可以评价为
其中beta;是由磁偶极子和地球磁场之间的角度。依据0le;beta;le;pi;,sinbeta;的值是大于零。可以假定为平均0.5和被包括在尺寸为安全系数考虑到对磁场的非有利取向以获得所需的转矩。式。 (3)必须保持板载磁偶极子的每个组件。考虑到千公里作为一个限制运行高度,作者获得量约为15,500新台币的最低磁场。与表2的结果相结合,对于磁偶极子的结果mmax表示四分之一0.018 AM2的值。磁偶极子的这个值也是足够飞船从发射台发射后旋转,这是自动进行的。
机载软件系统采用知名SGP4轨道传播模型的基础上,北美航空航天防御司令部(NORAD)两线元素(TLE)传播轨道。在该系统的本结构中,在当前TLE在卫星上被周期性地从地面上载设置。对的Cubesats,这种操作可以在数天的时间跨度来执行。以这种方式,传播路径的准确性是非常适合于磁场的评价,因为在位置计算中的误差是在低地球轨道几公里的量级的。
系统描述
反作用轮
反应车轮已按上尺寸的强烈限制从分配给所述控制系统的体积得出的设计。无刷微型电机已选定车轮提供动力。由冯哈伯(德国,舍奈希)产生的,它的特点是一个极其减小的尺寸,只有2毫米厚和1厘米直径,具有较高的额定转速和低功耗的要求。
根据数据表的特点,电机可提供0.16万·米和41000 rpm的空载转速的最大扭矩。 4伏的额定功率电源,整机在3.3 V与控制信号兼容。
控制电路的设计是基于由电动机生产者提供的电力驱动器。微控制器产生两个控制信号,一个用于旋转方向,一个用于时钟。
三个车轮已经安装在立方体的三个垂直表面,允许在所有三个轴控制。
电动机控制器提供的车轮角速度,这是由姿态控制系统内部使用的测量。该信息通过遥测传递到主机系统。
磁力矩
该磁力矩有被40毫米长的主要要求,以适应分配给ACS内卷。因此,合适的高渗透性杆已被市售,与所需的最大长度中选定的。选择高性能铁磁合金,通常可以得到具有2,300标称导磁率的铁磁核。酒吧直径6毫米,考虑到退磁,拥有约3.27times;10-5的表观渗透Wb的DA=·m的THORN;.Since所需要的磁偶极子为0.018 AM2,栅栏体积1131立方毫米,所需为磁力矩磁磁场是620.7A=米(7.8奥斯特),它可以通过在杆和50毫安电流的500转螺线管创口来获得。
图1显示一个磁力矩的控制电路。每个电路可以通过在其电源线闭合开关[STS8C5H30L A和B(ST微电子,瑞士日内瓦)],减少在不需要姿态控制一个或多个磁力矩功耗启用。 3.3伏的电源通过一个参考电阻R3,用于电流测定和电流检测。读出放。大器INA326(德州仪器,得克萨斯州),动力由一个独立的和可选择的电路,使该微控制器通过磁驱动器的有效流动的电流的读出,得到反馈,以确定是否电路的某些部分被损坏。放大器MCP6L71(微芯片,亚利桑那州钱德勒)通过脉冲宽度调制(PWM)信号,该信号通过一个R-C电路以过滤的交流分量接收控制信号,使正比于占空比的脉动少恒定信号。
该MOSFET BSH205(NXP半导体,荷兰Eindhoven)控制电流对磁力矩的流动。
因为只有一个正电源是可用的,以使电流在两个方向上的磁力矩流动时,负载通过H桥控制电路相连,从而使微控制器来切换由线圈所经历的电压的极性。
完整的磁力矩系统包括三个正交磁力矩,位于立方系统体积的三个正交边,如图所示2。
磁力计
有子系统整合其必要的传感器用于内务和操作的反馈。唯一的独立传感器是三轴磁力计,所使用的数字控制系统来计算磁力矩被施加的电流。
这种磁力计的x轴和y轴都基于HMC1022和HMC1021(霍尼韦尔,普利茅斯,明尼苏达州)的感应元件的Z轴,与设置在印刷电路板(PCB)面而z磁力在x-y磁力在外部垂直板。
为了确保传感器的正确的行为和擦除传感元件的任何残余磁化强度,有必要提供一个周期性设置/复位信号。这个信号的特征是高电流,两种极性的短脉冲,通过在包含在装置内的测量电桥的电容器的放电得到。图。图3示出为此目的而设计的电路:通过MOSFET sIRF7311(国际整流器,加利福尼亚州埃尔塞贡多)A和B,为3.3V由微控制器产生的信号是由与由传感器所要求的12伏兼容,则脉冲通过内部包含IRF7350互补MOSFET的两对夫妇(国际整流器公司,加利福尼亚州埃尔塞贡多)产生的。通常,N型MOS是活动的,连接输出到地面。 C19和C20避免直流(DC)路径的创建到输出,表现为正常操作期间的开路。当发出一组脉冲,N型MOS被打开和P型MOS被关闭时,排出的磁力计的两个电容器,创建高电流脉冲,其持续时间由电阻的存在下的输入限制P型MOS,从而限制了电容器的放电之后的电流。
复位脉冲通过打开的P-MOS和恢复正常操作时N型MOS突然短路两个电容,现在由脉冲充电,至地面的一侧,形成一个反向脉冲产生的。
读出电路已经根据数据表建议设计,采用在差分配置中的运算放大器,及z轴读电路的图4测试显示在校准一些不期望的行为和困难,所以这种子系统的一个版本将通过使用仪器放大器来实现。
磁力计的输出通过两个电阻,其中确定增益,到差动放大器的输入端。在同相输入端,一个偏移被添加到使正的和负的磁场的读出,即使使用单个电源。反馈网络上的电容器消除了任何残余的高频振荡由于高增益配置。由于输出是一个0-5 V范围和微控制器只有0-3.3 V容忍;一个分压器降低电压到正确的电平。
因为它具有特征为低噪声和高稳定的信号是重要的,对传感器单独的电源被设计,使用低功率,低噪音的电压稳定剂。
姿态控制系统的结构包含铁磁元件,如磁力矩线圈,可以创建在磁读数的偏移。然而,由于磁场信息用于差分运算,也不会造成任何伤害。还进行的线圈的剩磁的影响的研究,确定所述错误在最坏的情况下(两个读数通过对线圈的磁力计的接近的信道的方向相反的充分磁化分开)是引入读出的低于1%。
不同的情况是由电机线圈,其产生可变磁场可以影响磁力的动作的存在呈现。出于这个原因,传感器的位置已经从一个原型变到另一个以找到读数
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150409],资料为PDF文档或Word文档,PDF文档可免费转换为Word

