
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
英文翻译
原文标题 DEVELOPMENT POTENTIALS AND STRATEGIC OBJECTIVES OF INTELLIGENT TRANSPORT SYSTEMS IMPROVING ROAD SAFETY
改善道路智能交通系统的发展及安全
Gaacute;bor Pauer
道路安全中心KTI交通科学研究所有限公司H-1119,布达佩斯Than Karoly u. 3-5电子邮件:pauer.gabor@kti.hu
摘要:减少交通事故的受害者人数是欧盟的公开目标。智能交通系统通过警告司机的不正当行为,支持司机的一些正确做法,从而改善道路安全,因此智能交通系统能够为此作出贡献。我们研究的目的是分析系统的安全方面,构建解决方案,分析和探索发展的机会。对战略目标进行评估,并总结实现这些目标的相关进程。研究对道路智能交通系统的开发,还有对它潜力的有效利用作出了贡献。
关键词:智能交通系统,道路安全,发展策略
1.介绍
近十年来,道路交通事故率稳步提高。这一趋势在前两年停止了。实现欧盟目标和减少交通事故及其相关经济损失的义务是国家经济的优先事项(Elvik, 2000), (Garcia-Altes and Perez, 2007), (Torok, 2015), (Yang et al., 2013)。基于信息通信技术(ICT)的创新解决方案和改善道路安全的新型智能系统在这方面发挥着重要作用,因此应用它们具有重要的战略意义。
智能交通系统(ITS)通过集成提高了交通系统的效率信息技术。这些解决方案协调了运输过程,改进了能力、可预测性、可控性、安全性和通信方法的利用。(Hughes et al., 2015)、(Jarasuniene and Jakubauskas, 2007)、(Khorasani et al., 2013)、(Oei and Polak, 2002)和(Rosolino et al., 2014)等出版物研究了它们对道路安全的有益影响。
探索发展机遇,明确战略目标,有助于更好地发展未来这些系统潜力的利用(Torok, 2016a)。本文将其对道路安全产生影响的解决方案进行了收集和分类。各集团的发展机会已显露出来;战略目标是根据复杂的标准和分析方法发展和评价的。最后,总结了实现目标的相关步骤和过程。
2.分析、分类和评价当前提高道路安全的智能交通系统
它是一些基于技术的方法的集合名称,这些方法的目的是提高运输网络的质量、安全和效率。道路安全和执法是这些系统最重要的应用领域之一(Khorasani et al., 2013)。智能交通系统解决方案通过针对特定的风险因素来改善道路安全,这些风险因素包括车辆、道路环境和已经发现的导致道路事故的人为因素(Spyropoulou et al., 2007)。车内系统通过降低事故发生的概率来提高车辆的安全性减轻事故的影响(Van De Ven et al., 2013)。先进的驾驶员辅助系统(ABS、ACC、ESP、ASR、BSW等)就是这样的解决方案。虽然其中一些目前是自主运行的,但收集到的数据为通信系统和其他车辆系统或作为基础设施一部分的单元提供了机会(Huang et al., 2013)。电子呼叫项目得到了改进,通过在事故发生时
实施自动紧急呼叫和缩短应急服务响应时间来保证道路安全(Cabo et al., 2014)。
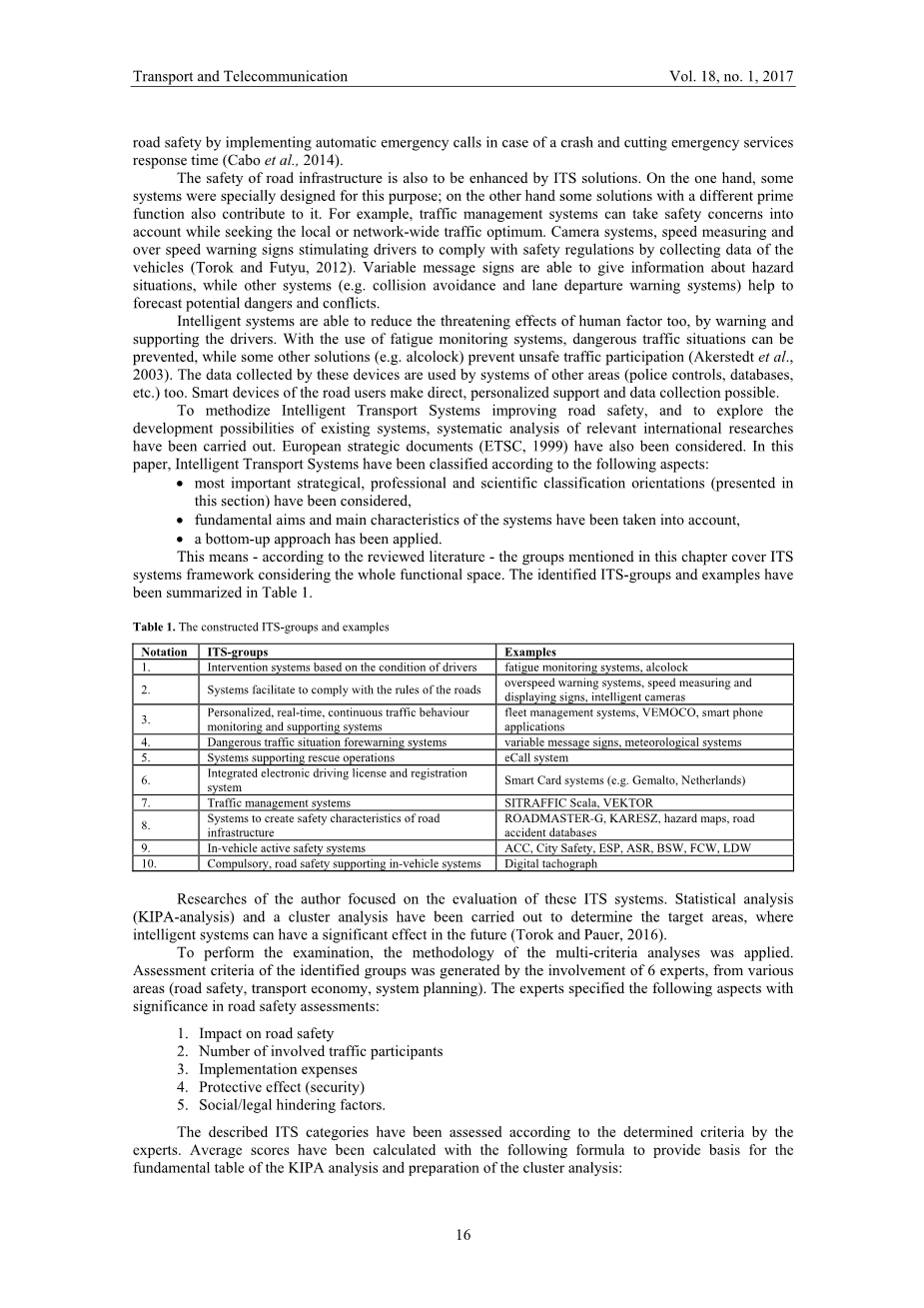
道路基础设施的安全性也将通过其解决方案得到提高。
一方面,一些专门为此目的而设计的系统;另一方面,一些具有不同素数函数的解也有贡献。例如,交通管理系统可以考虑安全问题,同时寻求局部或整个网络的交通最优。摄像头系统,测速和超速警示标志,通过收集车辆数据来刺激司机遵守安全规定(Torok和Futyu, 2012)。可变的信息标志能够提供有关危险情况的信息,而其他系统(例如避碰和车道偏离警告系统)有助于预测潜在的危险和冲突。
智能系统也能够通过警告和控制来减少人为因素的威胁
支持驱动程序。使用疲劳监测系统可以预防危险的交通状况,而其他一些解决方案(如alcolock)可以防止不安全的交通参与(Akerstedt et al., 2003)。这些设备收集的数据也用于其他领域的系统(警察控制、数据库等)。道路用户的智能设备使直接、个性化的支持和数据收集成为可能。
探讨智能交通系统在提高道路安全方面的作用
对现有系统的发展可能性,进行了系统的国际研究分析。欧洲战略文件(ETSC, 1999)也被考虑。本文将智能交通系统分为以下几个方面:
bull; 最重要的战略, 专业和科学分类取向,
bull; 根本目标和主要特征系统已经纳入计算,并应用自底向上的方法。
这意味着-根据所审查的文献-本章提到的小组涵盖了它
系统框架考虑了整个功能空间。表1总结了已确定的its组和示例。
表1 所构造的组和例子
|
Notation |
例子 |
|
|
1. |
基于驾驶员状态的its群干预系统 |
例如疲劳监测系统,超速报警系统,测速显示标志,智能摄像头 |
|
2. |
系统便于遵守道路规则 |
超速报警系统,测速和显示标志,智能摄像头 |
|
3. |
个性化、实时、连续的交通行为监察及支援系统 |
车队管理系统,VEMOCO,智能手机应用程序 |
|
4. |
危险交通状况预警系统 |
可变信息符号,气象系统 |
|
5. |
支援救援行动的系统 |
紧急呼叫系统 |
|
6. |
综合电子驾驶执照和注册系统 |
智能卡系统(如荷兰金雅拓) |
|
7. |
交通管理系统 |
SITRAFFIC Scala, VEKTOR |
|
8. |
创建道路安全特性的系统基础设施 |
公路管理员,KARESZ,危险地图,道路事故数据库 |
|
9. |
车内主动安全系统 |
城市安全,ESP, ASR, BSW, FCW, LDW |
|
10. |
强制性,道路安全支持车内系统 |
数字计速器 |
笔者的研究主要集中在对这些ITS系统的评价上。
统计分析和聚类分析确定了未来智能系统可以发挥重要作用的目标区域(Torok and Pauer, 2016)。
为了进行检验,采用了多准则分析的方法。
来自不同领域(道路安全、运输经济、系统规划)的6名专家参与了确定的小组的评估标准。专家们在道路安全评估中指明了下列重要方面:
1. 对道路安全的影响
2. 参与交通的人数实施费用
4. 保护作用(安全)
5. 社会/法律阻碍因素。
所述的类别,专家已根据本署所订定的准则进行评估
平均得分按下式计算,为KIPA分析的基本表和聚类分析的编制提供依据:
n = ITS组指数,
m = 各方面评价指数,
l = 专家指标,
pl,n,m =专家l根据方面m给ITS-group n打分.
Pn,m =专家对ITS-group n的平均得分,根据aspect m.
为了研究基于平均专家意见值的分析的适宜性,提出了相应的建议
将各系统组的平均分值按下式检验其离散值:
平均得分和相对分散情况见表2.
表2it组和方面的平均得分和相对分散
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[17618],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
组别 |
对道路安全的影响(0,246) |
涉及的交通参与者数目(0,250) |
实施费用(0,304) |
保护作用(0,075) |
社会/法律因素(0,125) |
Rel. disp. |
|
1. |
5,33 |
4,83 |
5,83 |
2,50 |
5,67 |
0,25 |
|
2. |
4,67 |
8,33 |
7,33 |
4,33 |
7,83 |
0,09 |
|
3. |
4,67 |
7,00 |
3,83 |
7,33 |
4,67 |
0,25 |
|
4. |
5,33 |
7,00 |
6,00 |
3,50 |
6,83 |
0,25 |
|
5. |
4,50 |
5,00 |
7,33 |
3,83 |
8,00 |
0,18 |
|
6. |
5,67 |
9,50 |
3,83 |
7,83 |
4,67 |
0,14 |
|
7. |
3,83 |
6,33 |
4,83 |
2,33 |
6,00 |
0,24 |
|
8. |
6,17 |
3,83 |
5,17 |
1,50 |
9,00 |
0,23 |
|
9. |
7,00 |
8,00 |
8,00 |
5,50 |
8,50 |
0,25 |
|
10. |
5,00 |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

