英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
改进操作的优化设计策略具有低分辨率霍尔传感器的IPM BLDC电机
Hyun-Soo Seol , JongSuk Lim, Dong-Woo Kang, Joon Sung Park ,
and Ju Lee , Senior Member, IEEE
摘要——本研究提出了一种内部永磁(IPM)无刷直流(BLDC)电机设计策略,该策略利用基于霍尔传感器信号的BLDC控制。IPM电机的磁通量根据转子位置而异,霍尔传感器的异常问题与磁通量有关。为了找出霍尔传感器异常的原因,我们对霍尔传感器位置处的磁通密度进行了有限元分析。此外,还提出了一种具有槽口结构的IPM模型来解决异常霍尔传感器问题,并推导出其磁性等效电路(MEC)模型。基于MEC模型,提出了一种最优的转子设计方法,并推导出最终的模型。然而,从最佳转子获得的霍尔传感器信号并不完美。为了提高BLDC电机控制的精度,提出了一种转子位置估计方法。最后,进行实验来评估所提出的IPM型BLDC电机和霍尔传感器补偿方法的性能。
关键词—异常霍尔传感器信号,边缘场,无刷直流(BLDC)电机,磁等效电路(MEC)模型,优化,位置估计。
1.导言
手稿于2017年2月6日收到;2017年5月12日修订;2017年6月1日发布。发布日期2017年6月16日;目前版本的日期为2017年10月24日。这项工作得到了韩国能源技术评估和规划研究所能源技术人力资源计划(KETEP)的支持,该计划获得了贸易,工业和能源部韩国。(20154030200900),韩国国家研究基金会(NRF)基础科学研究计划,由科学部,ICT和未来规划部资助(2015R1C1A1A01055013)。(通讯作者:Dong-Woo Kang。)
H.-S. Seol和J. Lim在韩国汉阳大学电子工程系首尔04763(电子邮件:mookhang16@naver.com; ljongsukl@hanyang.ac.kr)。
D.-W. Kang是韩国大邱市42601,启明大学电机工程系(电子邮件:dwkang @ kmu.ac.kr)。
J.S. Park与韩国汉阳大学电气工程系,韩国首尔04763以及韩国电子技术研究所韩国富川401-402智能机电一体化研究中心(电子邮件:parkjs@keti.re .kr)。
J. Lee与韩国汉阳大学电气工程系首尔04763(电子邮件:julee@hanyang.ac.kr)。
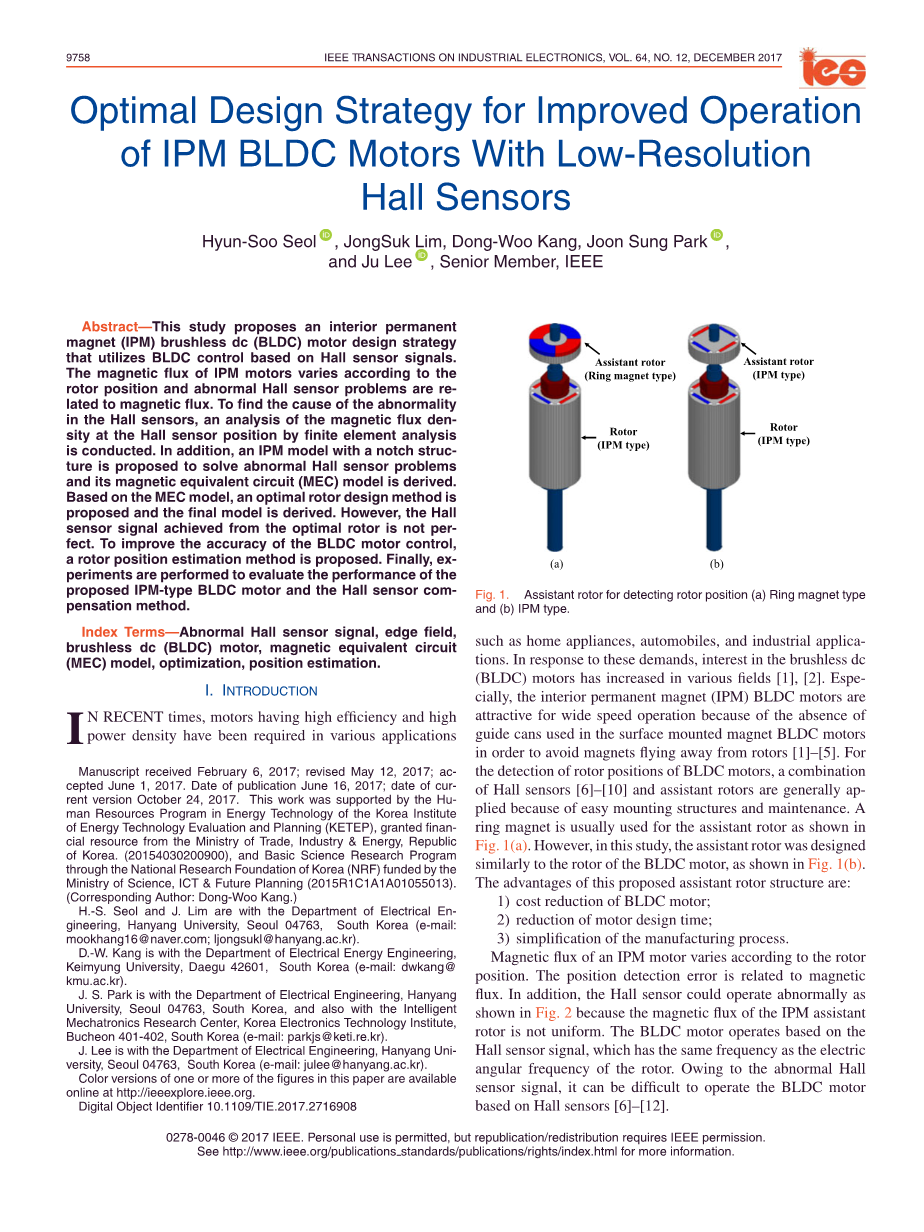
在近期,在各种应用中需要具有高效率和高功率密度的电动机如家用电器,汽车和工业应用。针对这些需求,对无刷直流(BLDC)电机的兴趣在各个领域都有所增加[1],[2]。特别是内部永磁(IPM)宽调速的无刷直流电机更具有吸引力,由于没有用于表面安装的磁体无刷直流电机的导向罐,所以磁铁不容易从转子上飞散[1] - [5]。为了检测BLDC电机的转子位置,通常采用霍尔传感器[6] - [10]和辅助转子的组合,因为安装结构和维护都很简单。如图1(a)所示,辅助转子通常使用环形磁铁。然而,在这项研究中,辅助转子的设计类似于BLDC电机的转子,如图1(b)所示。这种提出的辅助转子结构的优点是:
1)BLDC电机的成本降低;
2)减少电机设计时间;
3)简化制造过程。
IPM电机的磁通量根据转子位置变化而变化,位置检测误差与磁通有关。此外,由于IPM辅助转子的磁通量不均匀,霍尔传感器可能会异常运行,如图2所示。BLDC电机基于霍尔传感器信号运行,霍尔传感器信号的频率与转子的电角频率相同。由于霍尔传感器信号异常,可能难以使用基于霍尔传感器的BLDC电机[6] - [12]。
为了精确检测转子位置并克服低分辨率霍尔传感器,许多研究已经描述了方法和技术,例如使用ANF-PLL的BLDC电机控制[6],带有非平衡霍尔传感器的滤波技术[8],模型参考基于自适应控制的速度控制[10],矢量跟踪位置观察器以低分辨率霍尔传感器驱动[12]。 这些研究集中在使用控制算法的位置误差补偿方法上。 但是,在应用位置补偿方法之前,需要检测准确的位置信号。通过向控制器提供准确的信号,BLDC控制器可以配置为更简单可靠。因此,需要考虑到低分辨率霍尔传感器的操作,对BLDC电机设计策略进行研究。在设计阶段考虑这些问题非常重要。
在这项研究中,我们考虑IPM辅助转子设计,它具有与转子相同的结构。为了解决如图2所示的异常霍尔传感器信号问题,提出了基于霍尔传感器信号的基于BLDC控制的IPM BLDC电机设计策略。为了找到霍尔传感器异常的原因,第2节讨论了霍尔传感器位置处磁通密度的有限元分析(FEA)分析。在第3节中,提出了一种具有槽口结构的IPM模型来解决异常的霍尔传感器问题,并推导出其磁性等效电路(MEC)模型。基于MEC模型,辅助转子的优化方法在第4节中提供。 然而,由辅助转子优化获得的霍尔传感器信号并不完美。 为了提高BLDC电机控制的准确性,第5部分提出了转子位置估算方法。第6部分,通过实验描述来评估所提出的BLDC设计方法和霍尔传感器补偿方法的性能。 第7节讨论结论。
2.异常霍尔传感器信号的原因分析
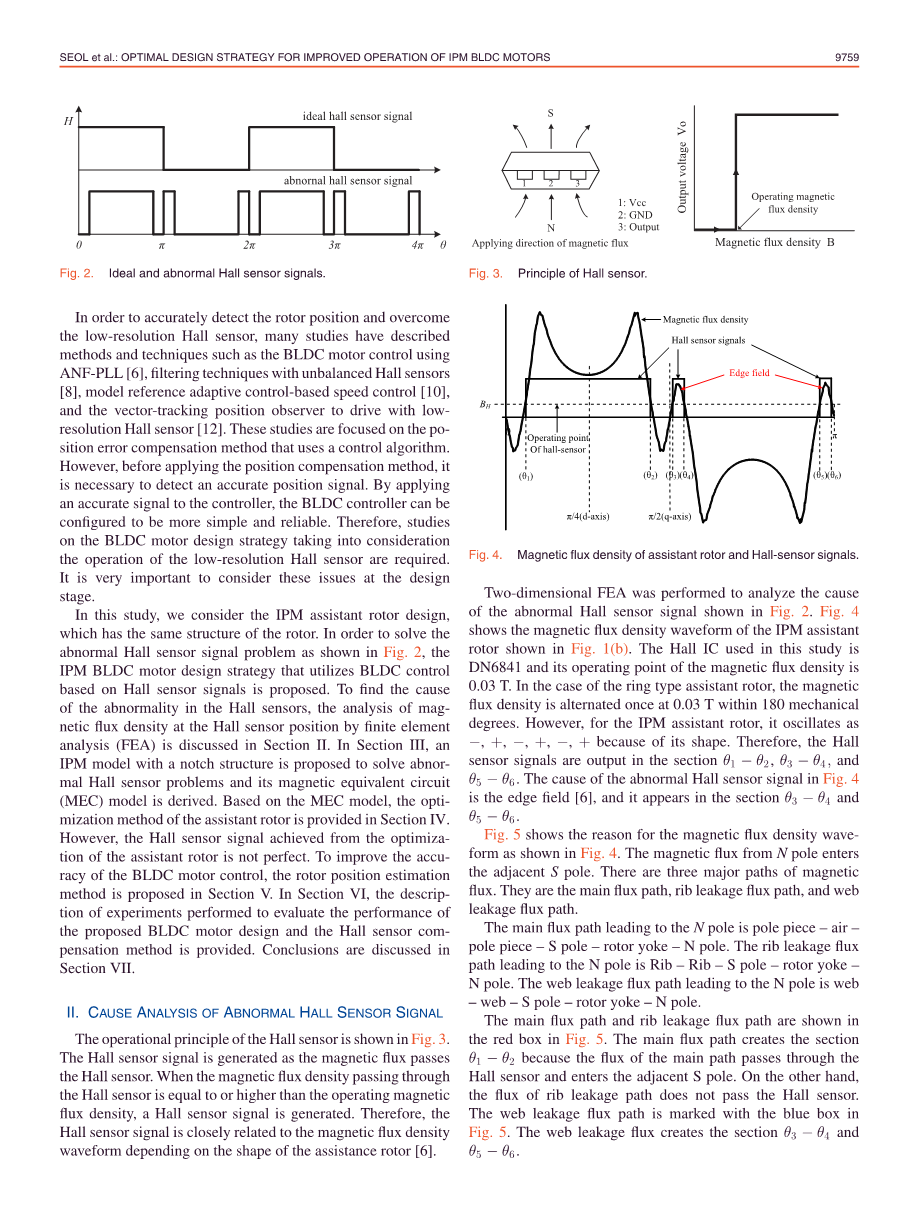
霍尔传感器的工作原理如图3所示。霍尔传感器信号在磁通量通过霍尔传感器时产生。 当通过霍尔传感器的磁通密度等于或高于工作磁通密度时,产生霍尔传感器信号。因此,霍尔传感器信号取决于辅助转子[6]的形状与磁通密度波形密切相关。
|
|
|
图1用于检测转子位置的辅助转子 (a)环形磁铁型和(b)IPM型 |
|
|
|
图2 理想和异常的霍尔传感器信号 |
进行二维FEA分析图2所示的异常霍尔传感器信号的原因。图4显示了图1(b)中所示的IPM辅助转子的磁通密度波形。本研究中使用的霍尔IC是DN6841,其磁通密度的工作点是0.03T。在环形辅助转子的情况下,磁通密度在0.03T内在180度机械度内交替一次。 但是,对于IPM辅助转子,由于它的形状其振荡为-, ,-, ,-, 。因此,霍尔传感器信号在部分theta;1-theta;2,theta;3-theta;4,theta;5-theta;6中输出。图4中霍尔传感器信号异常的原因是边缘场[6],出现在theta;3-theta;4和theta;5-theta;6部分。
图5表示出了如图4所示的磁通密度波形的原因。来自N极的磁通量进入相邻的S极。 有三条主要的磁通路径。它们是主要的磁通路径,肋条漏磁通路径和网漏磁通路径。
通向N极的主磁通路径是极片 - 空气极片 - S极 - 转子磁轭 - N极。通向N极的肋漏磁通路径是肋 - 肋 - S极 - 转子磁轭 - N极。 通向N极的腹板漏磁通路径是腹板- 腹板 - S极 - 转子轭 - N极。
主磁通路径和肋泄漏磁通路径在图5中的红色框中示出。主磁路路径产生截面theta;1-theta;2,因为主路径的磁通量穿过霍尔传感器并进入相邻的S极。另一方面,肋泄漏路径的通量不通过霍尔传感器。 腹板漏磁通路径用图5中的蓝框表示。腹板漏磁通产生了theta;3-theta;4和theta;5-theta;6截面。
|
|
|
图5 IPM型辅助转子的磁通线图 |
3.IPM型转子设计
在这项研究中,转子和辅助转子的形状是相同的。 转子和定子磁性地构成闭合回路,并且辅助转子和空气构成闭合回路。 在A部分中,我们描述了基本IPM型辅助转子的MEC模型。在B部分中,提出了新辅助转子的MEC模型来消除边缘场。另外,还描述了具有与新的辅助转子相同形状的转子的MEC模型。
A. 基本IPM型转子
在第二节中,辅助转子有三条磁通量路径。 它们被表示为如图6所示的MEC模型。由于来自永磁体的磁通量被精确地分成两半,所以可以构建半极对的MEC模型[14],[16]。 来自永磁体的磁通量被分成肋,空气和腹板。
由于电工钢的渗透率远高于空气,转子铁芯的磁阻可以忽略不计。然而,由于饱和度[13] - [18]。肋骨的不情愿不能被忽略。等式(1)-(2)是勉强永磁体,肋骨,空气和肋骨。
|
|
(1) |
|
|
(2) |
这里,Tm是磁体的厚度,mu;0和mu;r,m分别是空气的磁导率和磁体的相对磁导率。Wm是磁铁的宽度,Lstk是辅助转子的堆叠长度。lrib是肋骨的长度,Trib代表肋骨的厚度。另外,
mu;r,rib是肋的相对磁导率。
|
|
(3) |
|
|
(4) |
在这里,lair和Aair是气隙中主要通量路径的长度和面积。ghall大厅是霍尔传感器和辅助转子的差距,Wweb是卷筒纸的宽度。
B. 提议的IPM型转子
为了消除边缘效应,必须减少腹板漏磁通量。这可以通过增加腹板漏磁通路径的磁阻来实现。图7显示了所提出的IPM辅助转子。与传统的辅助转子的不同之处在于凹口结构应用于网状物。凹槽结构增加了路径的磁阻。因此,构成凹口结构磁阻的参数非常重要。所提出的辅助IPM型转子的MEC模型如图8所示。由于槽口结构是半圆形,所以必须构建反映槽口结构的MEC模型。换句话说,网的磁阻必须重新定义。因此,有必要分析磁通量流入切口结构及其形状。
穿过凹槽结构的漏磁通量可以表示为如图9所示。凹槽结构的磁阻变成具有与直线和圆弧耦合的磁路的磁阻。这是通过将弧的长度相对于弧的半径积分来计算的。此时,电弧的角度被假定为90°。 等式(5)计算具有凹口结构的腹板的渗透性,并且重新定义腹板的磁阻
|
|
(5) |
这里,R是切口的半径。
从(1),(2),(3)和(5),肋和缺口处的磁通量可以通过如下方法获得:
|
|
(6) |
|
|
(7) |
从(6)和(7)可以得到肋和缺口处的漏磁通密度。减少(9)的值是主要的目标函数
|
|
(8) |
|
|
(9) |
转子和定子磁性地构成闭合回路。图10显示了所提出的IPM BLDC电机的MEC模型。 转子的形状与辅助转子的形状相同。 由于电工钢的渗透率远高于空气,所以转子和定子的磁阻可以忽略不计。 来自永磁体的磁通量被分成肋,腹板和气隙。 方程(10)和(11)分别提供了气隙和其通量的磁阻。 最后,在(12)中,扭矩方程反映了凹槽结构,可以看出,减小肋和腹板中的磁通量对提高扭矩起着重要作用。 因此,需要适当的设计,因为R和Trib决定了肋和腹板的通量
|
|
(10) |
|
|
(11) |
|
|
(12) |
这里,g和Rg分别是气隙的长度和原点与气隙之间的距离。theta;m是极角。
|
|
|
|
图6 常规型辅助转子的MEC模型 |
图7 建议的IPM型辅助转子 |
|
|
|
|
图8 提出的IPM辅助转子的MEC模型 |
图9.缺口渗透模型 |
|
|
|
|
图10 建议的IPM型BLDC电机的MEC模型 |
|
4.优化设计策略
本研究的优化设计流程图如图11所示。首先分析了霍尔传感器信号异常的原因(第二节)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21883],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

