
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
220 可靠性工程和 系统安全
图9.按类别分组的性能形成因子(PSF)百分比。
按认知领域分组的模式(IEMs)表明,BN模型中与感知类别相关 的变量:'未检测'、'迟检测'和'视觉错误感知'在碰撞场景中也是相关的。
由于BN模型包含了性能形成因素,
(PSFs)中的大部分变量都来自这一类别。对碰撞事故的分析表 明, 398按类别分组的绩效形成因素,如图所示
敏感性分析
在分析中考虑了不同的敏感性度量。第一种方法包括引入关于变量的特定状态的证据(I)。这相当于将其先前状态概率(SPI)改变为
1. 因此,变化的
状态概率为=(1minus;Xsii),然后利用所开发的方法评估了对目标状态概率(TS)的影响
BN模型。这样目标的先验概率
状态(Po)更改为PE由于在中引入了证据(e)TS,I
模型变量(I),其状态概率按xi;Xi变化。偏导数灵敏度测度被定义为
敏感性分析:
比值
在目标概率PTS的变化之间,I=(PE,Iminus;Po)
天气(14.6%)、时间(10.1%)和船上的气氛(6.0%)-内部/
外部环境;沟通不畅(4.8%)、缺乏信息(4.0%)和语言问题
(1.8%)-沟通/信息方面;
时间压力(5.5%)、程序(5.0%)、组织政策(4.5%)、运营
(2.5%)、组织文化(2.3%)、监督(2.01%)和人员/工作特征
(1.0%)–组织因素;
培训/能力不足(7.0%)、缺乏经验(3.8%)、缺乏定向
(2.3%)-培训/能力;身体疲劳(8.0%)、压力(3.8%)和认 知疲劳(1.3%)-个人因素。
此外,还考虑了另外四个变量:'导航系统检测'、'能见度'、'熟悉程度'和'HMI问题'。
表2
敏感性分析所选的变量。
以及在模型参数(I)中引入证据(e)之后状态概率eta;Xi的变化。在图6和图7中报告的灵敏度分析的结果也采用了该灵敏度度量,但是在这种情况下,目标状态的后验边缘概率相对于所研究的参数的偏导数对应于目标概率变化
由于模型参数的范围是从0到1(即Xi=)1。
还考虑了Hanninen和Kujala[20]提出的另一种灵敏度测度,该方法包括计算:
一个变量所能产生的目标状态概率的最大变化I。换句话说,一个给定状态的概率被设置为1,而该变量的其他状态的概率被设置为0。对于每个变量,产生最大概率的状态和对应最小概率的状态在概率上的差异被记录下来。
其中,SJ和St分别是产生变量I的最大和最小碰撞概率的状态。差值
描述了变量可以产生的目标状态概率的最大变化。
示踪剂类别 变量
换句话说,apaax可以描述为目标状态的差异。
材料 雷达探测
IEM 晚期检测;未检测;视觉错觉
当变量处于'最坏'状态和'最好'状态时产生的概率,
PSF:通信/信息的各个方面
PSF:内部/外部环境
缺乏信息;沟通不畅;语言问题
天气;时间;船上的空气
PSF: 组织因素 时间压力;程序;组织计划 ,LICIES;运营;组织文化;监督;人员/岗位特征
PSF:培训/能力培训不足;缺乏经验/指导
PSF:个人因素 疲劳;压力 ,导航系统检测,能见度,家庭
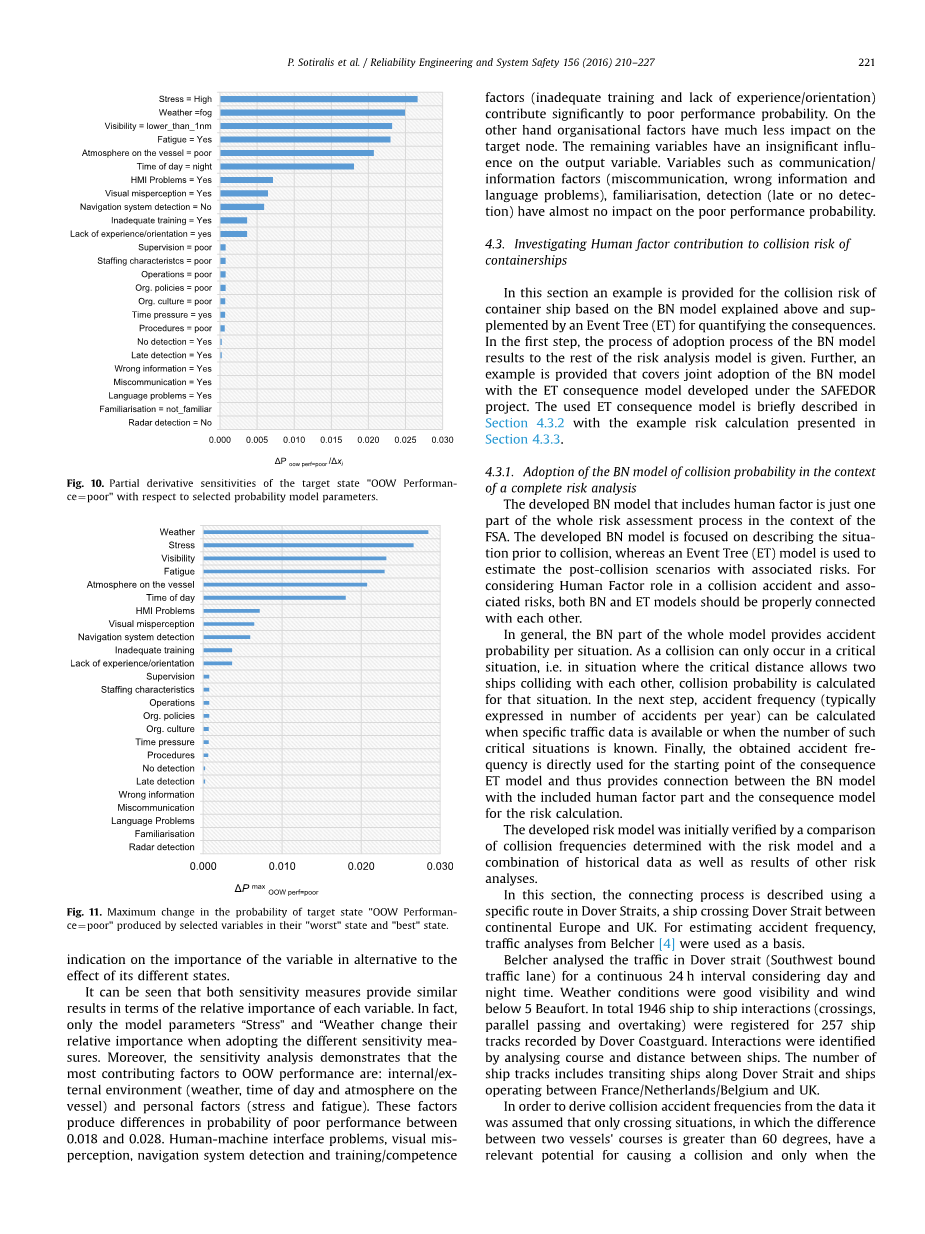
图10和图11示出了使用两个灵敏度度量De对所选模型变量进行灵敏度分析的结果。特别地,图10 示 出了目标状态 'OOW Performance/poor' 的后验边缘概率相对于每个模型参数( POOW Perf=poor/Xi)的偏导数灵敏度,而图11示出了最大差值- 产生'Oowperformancefrac14;poor'的概率
处于'最差'状态(产生最大值的状态)的变量
HMI问题 贫穷者和'最佳'状态(产生最小值的状态
POOW POWER PERF=POWER)。最后一个灵敏度度量提供了一个全局
图11.选定变量在其'最差'状态和'最好'状态下产生的目标状态'OOW性能'的概率的最大 变化。
说明变量的重要性在替代其不同状态的影响。
可以看出,就每个变量的相对重要性而言,两种敏感性度量提供了相似的结果。实际上,当采用不同的灵敏度测度时,只有模型参数'应力'和'天气'改变了它们的相对重要性。此外,敏感性分析表明,对OOW性能影响最大的因素是:内部/外部环境(天气,一天中的时间和船上的空气)以及个人因素(压力和疲劳)。 这些因素在以下方面产生差异:
0.018和0.028.人机界面问题、视觉错觉、导航系统检测和培训/能 力 ,因素(培训不足和缺乏经验/方向)对业绩不佳的可能性有很大的影响。另一方面,组织因素对目标节点的影响较小。其余的变量在输出变量上有一个符号。交流/信息因素等变量(错误交流、错误信息和语言问题)、熟悉程度、检测(迟检测或不检测)对不良性能概率几乎没有影响。
-
- 调查人为因素对集装箱船碰撞风险的影响
在本节中,以上述BN模型为基础,以某一事件为补充,给出了集装箱船碰撞风险的计算实例。REE(ET)量化后果。在第一步中,给出了BN模型结果到其余风险分析模型的采用过程。此外, 还提供了一个实例,说明了BN模型与Safedor项目下开发的ET后果模型的联合应用。使用的ET后果模型在第4.3.2节中简要描述, 在第4.3.3节中给出了风险计算示例。
-
-
- 在全面风险分析中采用BN碰撞概率模型
-
图10.目标状态'OOW性能'相对于所选概率模型参数的偏导数灵敏度。
已开发的包含人的因素的BN模型就是其中之一。
BN模型主要用于描述碰撞前的情况,而事件树(Event Tree,ET) 模型则用于估计碰撞后的风险情景,为了考虑人的因素在碰撞事故中的作用以及相关的风险,BN模型和ET模型之间需要进行适当的连接。
通常,整个模型的Bn部分提供了每种情况下的事故概率。由于碰 撞只可能发生在危急情况下,即在临界距离允许两船碰撞的情况下, 计算该情况下的碰撞概率。在下一步中,事故频率(通常以每年的 事故数量表示)可在有具体数据或已知此类危急情况的数量时进行 计算。最后,得到的事故频率直接作为后果ET模型的起点,从而提 供了BN之间的联系。包含人为因素部分的模型和用于风险计算的后 果模型。
最初,通过与风险模型确定的碰撞频率进行比较,并结合历数据和其他风险分析结果,对所开发的风险模型进行了验证。在本节使用欧洲大陆和英国之间的多佛尔海峡( Dover Straits)中的特定航线描述连接过程。为了估计事故频率,使用Belcher[4]的TRAF C
Belcher分析了多佛海峡(西南方向TRAF C车道)连续24小时间隔的昼夜时间。天气状况为能见度良好,风力低于5级。总共1946艘船与船之间的相互作用(交叉、平行通过和超车)多佛海岸警卫队记录了257艘船的航迹。通过分析船与船之间的航向和距离,对相互影响进行了评估。船舶航迹的数量包括多佛海峡的过境船舶和法国/ 荷兰/比利时和英国之间运行的船舶。
为了从数据中得出碰撞事故频率,假定只有两船航向差异大于60度的交叉情况才有可能造成碰撞,而且只有在下列情况下才 会发生碰撞:
222
船与船之间的距离为R5海里。这产生了总共484个交叉情况。对于所选的场景,一艘船在法国/荷兰/比利时和英国之间航行,贝尔彻提供的数据包含47艘从多佛出发前往加来的船,其中12艘有明显的航行(如果没有其他船将比 1.6海里,相当于两倍于0.8海里的NME距离),从加来到多佛的47 艘船中,有18艘船有明显的航向,因此,可以得出结论,在68%的航程中,船舶处于碰撞航向。这是在可能发生碰撞的航线上的概率。然而,船员的正常航行活动大大减少了导致碰撞的情况。根据'正常'、'异常'和'危急情况' 三个运行阶段和贝尔彻提供的材料,假设船舶仅在这条航线上运行,这些阶段的概率估计如下:
正常情况:从多佛或加来出发穿越多佛海峡的船舶中,平均68%的船舶在碰撞航向;异常情况:其中14%的船舶在0.8海里以下的距离内与另一艘船舶交叉(484艘中的66艘)。这种情况通常被Belcher[4]称为未遂相遇(Near Miss Encounters,NME),但在本研究中,交叉被称为异常情况。
危急情况:9%(66艘船舶中的6艘)的这些船舶在小于0.3海里
根据以上描述,冲突频率通常可以在有关于TRAFC情况的统
计数据时获得。获得的冲突频率是用作结果ET部分的输入值的值。
-
-
- 后果建模
-
风险模型的这一部分基于欧盟研究项目Safedor(2005-2009年) 中以前开展的工作,特别是关于集装箱船的FSA(MSC83/INF.8)。考虑到与人类、环境和财产有关的后果,用于制定碰撞后碰撞风险模型的高级事件序列如图12所示。
这一事件序列是在对伤亡报告进行调查的基础上制定的,并考虑了风险评估的主要特征,即:E.船舶是否正在撞击或被撞击、事故发生地点、损害范围以及船舶是否幸存。情景中使用的条件概率是通过对以下数据库的综合分析确定的:IHS Fairplay Casualty,海事组织全球综合航运信息系统(GISIS)劳埃德海事调查股(LMIU)
基于高层事件序列,建立了碰撞事件树模型。事件树模型考虑了人类和环境后果以及与船舶和货物损失有关的经济损失。与人类有关的风险是按死亡人数估计,与环境有关的风险是按泄漏 燃油公吨数加上危险货物公吨数估计。通过估计沉没概
的距离内相互交叉[4],因此,在需要采取避碰行动的距离内。 率(图12中的生存能力),该模型依赖于船舶大小。基于SOLAS
2009破损稳性要求和基于船舶尺寸的典型船员人数的后果,载货
碰撞风险模型的贝叶斯部分描述了人在紧急情况下的表现,并估 计了发生碰撞的概率。在将BN模型设置为100%交叉情况后,计算出在临界情况下的碰撞概率为0.000021。进一步的,使用通过BN模型 计算的碰撞概率来估计碰撞频率(根据每Shi的碰撞次数P(年)对于一艘从多佛驶往加来的船,结合上面总结的正常、异常和危急情 况的条件概率,如表3所示。对于一艘每天航行6次、往返3次的罗派克斯船,两个港口之间的年通过次数计算为2192(6365)次。随着 每年通过的次数,在碰撞航线上(即正常情况下)的相关概率以及进一步发展为异常和临界状态的概率,以及由t提供的碰撞发生概率。在BN模型中,碰撞频率是根据表3乘以上述获得的值计算得到的。
与以往FSA研究的平均碰撞频率相比,该值偏小。特别是考虑到多佛海峡是一个高密度的海峡区域。例如,ROPAX的平均碰撞事故频率约为1.29次,每船年103次(MSC 85/INF.3),根据欧盟基于目标的破舱稳性研究项目(GOALDS,2009-2012年),每艘船每年发生8103次碰撞。然而,对于当前的模型开发阶段,得到的频率仍然接近于以前获得的频率。
表3
量和经济损失。
事实上,任何其他后果模型(无论是ET模型还是另一个BN模型) 都可以与所开发的BN模型相连接来完成QRA,因此,本文的重点是描述BN模型(考虑人的因素)以及该模型与现有FSA方法的接合点,对于所使用的ET后果模型没有提供更多的细节。
-
-
- 示例风险计算
-
为了证明其能力,使用风险模型来估计在Dover路线上运行的典型支线的风险
–Calais。对于示例应用程序,假设支线每周执行一轮,即每周两次航行,并且在下文中,仅计算多佛海峡的风险。根据该计划,支线每年将穿越多佛海峡104次:(2/7)x365.25。
考虑到后果评估(即FSA过程)不是工作的一部分,仅用于描述和验证整体模型,没有进一步提供用于计算社会、环境和财产 风险的细节。
根据这些假设,该航线的风险通过以下概述的已开发风险模型确定:
碰撞频率计算
|
船舶相遇次数 |
正态分布概率 |
异常情况概率 |
临界分裂概率 |
碰撞发生概率 |
碰撞频率 |
|
|
|
|
|
(BN型号) |
|
|
每年 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239424],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

