
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
无刷双馈发电机独立运行无传感器直接电压控制
摘要:传统独立运行无刷双馈发电机控制策略,需要来自转子位置或速度传感器的反馈,降低了系统的可靠性,增加成本和机器的轴向体积。本文中提出独立运行无刷双馈发电机的无传感器直接电压控制策略。在四种典型工况下的实验结果表明,该系统具有良好的动态性能。此外,由于不需要发电机参数,所提出的控制策略具有鲁棒性。
关键词:无刷双馈发电机,直接电压控制,无传感器控制,独立发电系统
Ⅰ引言
无刷双馈发电机(BDFG)可以用于变速恒频发电(VSCF),定子中有两个单独绕组(功率绕组,PW和控制绕组,CW),没有碳刷和滑环。
无刷双馈发电机结构简单可靠,在风力发电、船舶轴带发电方面有显著优势。风力发电中的BDFG一般是与电网相连的,其控制目标是调节有功功率与无功功率。然而,独立发电系统需要直接控制输出电压,使得输出电压的幅值和频率在转子转速或用电负载变化时恒定。因此在风力发电方面无刷双馈发电机的控制策略不适合用于独立发电系统。所以提出一种独立发电系统的直接电压控制策略是必要的。文献[2-4]研究了无刷双馈发电机用于风力发电的控制策略。文献[5-7]研究了无刷双馈发电机用于独立船舶轴带发电的控制策略, 这些控制策略都要需要传感器测量转子转速。然而, 编码器可能会对发电系统带来负面影响, 主要有以下几个方面:
- 编码器会增加系统复杂度和维护保养费用
- 编码器容易受工作环境的影响,而无刷双馈发电机的运行环境往往比较恶劣, 因此编码器的安装降低了系统可靠性。
- 在电机轴上安装编码器会增大电机轴向体积,并减少系统的机械鲁棒性。
为了提高无刷双馈发电机运行的鲁棒性, 减少系统的成本, 有必要研究无传感器控制策略。在本文提出了独立无刷双馈发电机的一种无传感器直接电压控制策略, 该策略可以实现对功率绕组电压幅值和频率的直接控制,无需来自转子位置和速度传感器以及发电机参数的任何反馈。并且在一台为船舶轴带发电系统设计的30kW原型无刷双馈发电机上进行了实验研究,实验结果表明,该控制策略具有良好的稳态和动态性能。
Ⅱ无刷双馈发电机的工作原理和动态矢量模型
- 基本运行原理
无刷双馈发电机可以在多种模式下运行,包括双馈、级联和感应模式。双馈模式为最佳模式,在这种模式下,转子转速、PW频率和CW频率之间的稳态关系可以表示为
|
|
(1) |
其中,p为极对数,omega;为角频率。下标1,2和r分别表示PW, CW和转子。当为零时,转子以自然同步转速旋转。转子转速高于的转速称为超同步速度, 低于的转速称为次同步速。
当转子速度变化时,为保持恒定,的值应随着的变化而变化, 并且的表达式能由式 (1) 推导出:
|
|
(2) |
如果忽略定子和转子的铜耗, PW和CW的有功功率之间的关系如[5]描述
|
|
(3) |
当无刷双馈发电机应用于独立发电系统中时,PW总是输出功率。然而,在自然同步转速以下时, CW将从PW吸收功率,这是因为此时为负的。根据式 (3),PW和CW的功率流动方向是相对的。同理,在超同步速时,CW向负载输出功率。
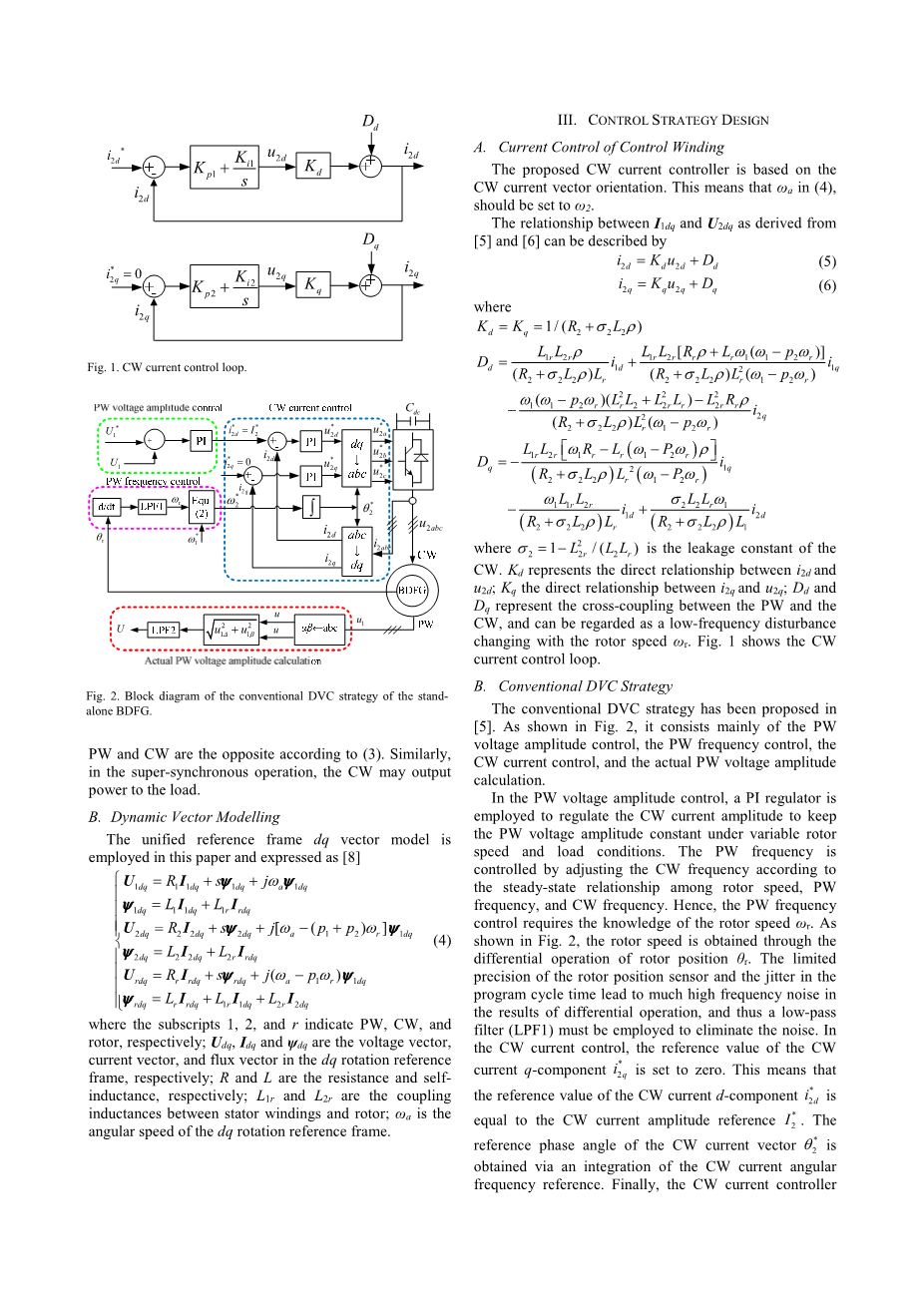
图1 CW电流控制环
图2独立无刷双馈发电机的传统DVC策略框图
B.动态矢量建模
无刷双馈发电机在两相旋转dq坐标系下的动态数学模型为:
|
|
(4) |
下标1, 2和r分别表示PW, CW和转子;,和分别为坐标系下的电压矢量,电流矢量和在磁链矢量;、分别为电阻、自感;和是定子绕组和转子之间的耦合电感;为旋转坐标系的角速度。
Ⅲ控制策略设计
- 控制绕组的电流控制
提出的CW电流控制策略基于CW电流的矢量方向。这意味着(4)中的应该设为。
和之间的关系由(5)(6)表示
|
|
(5) |
|
|
|
(6) |
其中,
其中为CW的漏感系数,代表了从到的开环一阶传递函数; 代表了从到的开环一阶传递函数, 和代表PW和CW之间的交叉耦合,可以看作是低频扰动随转子速度的变化而变化。图一为CW电流控制环。
- 常规DVC策略
文献【5】中提出了常规的DVC策略。如图2所示,它主要由PW的电压幅值控制、PW频率控制、CW电流控制和实际PW电压振幅计算。
在PW电压幅值控制中,PI调节器是用于调节CW电流幅值,使其在转子速度和负载变化的情形下保持电压幅值稳定。根据转子转速、PW频率和CW频率之间的稳态关系,通过调整CW频率来控制PW频率。因此,PW频率的控制需要通过转子速度。如图2所示,转子速度是通过转子位置的差分运算的结果。由于转子位置传感器的精度有限,加上程序周期时间的抖动,差分运算产生的高频噪声较大,必须采用低通滤波器(LPF1)来消除噪声。在CW电流控制中,CW在 q轴上的参考值设为0。这意味着CW电流d轴上的分量的参考值是等于CW电流振幅参考值。CW电流矢量参考角是通过CW电流角频率参考的积分获得的。最终,CW电流控制器可以产生相应的励磁电流频率和幅值。通过Clark变换获得实际PW电压振幅,通过LPF2滤除PW电压幅值上的纹波。
图3.无刷双馈发电机独立运行无传感器DVC控制策略
图4.不同参考系中的PW电压矢量
图5.PW电压相位角的线性化控制环
C.无传感器DVC策略。
转子位置或速度传感器可以降低系统可靠性、增加机器的成本和轴向体积。因此,开发一种适用于独立运行BDFG的无传感器DVC策略是非常重要的。所提出的无传感器DVC控制策略如图3所示。三相PW电压转换为d轴和q轴分量。如图4所示,dq坐标系的d轴与PW电压矢量对齐。然后是PW电压的q轴分量可以表示为
|
|
(7) |
其中是实际PW电压幅值,为实际PW电压矢量角。为参考PW电压矢量角。
在平衡点附近,基于式子(7)我们能够推导出
|
|
(8) |
其中是参考相位角度和实际的PW电压相位角之间的差值。并且,根据式,图5示表示PW电压相位角的线性化控制回路。
图6.实验装置图片
图7.实验装置结构
原型BDFG主要参数
参数名 参数值
容量 30KVA
转速范围 600~1500rpm
PW极对数 1
CW极对数 3
PW额定电压 380V
PW额定电流 45A
CW电压范围 0—350V
CW电流范围 0—40A
PW电阻 0.4034Omega;
CW电阻 0.2680Omega;
转子电阻 0.3339Omega;
PW自感 0.4749H
CW自感 0.03216H
转子自感 0.2252H
PW与转子之间互感 0.3069H
CW与转子之间互感 0.02584H
转子种类 绕线转子
从图3中得出,通过调整CW参考电流,使PW电压d轴分量跟踪PW的参考电压。通过调节CW电流参考频率使PW电压q轴分量为零,这意味着当系统稳定时PW电压矢量与d轴重合,也即PW电压矢量的旋转频率为,因此,PW电压频率可以保持恒定。CW电流控制方法与传统DVC策略相同。
Ⅳ实验结果
A.实验设置
如图6所示建立了实验装置 .图7所示为控制回路结构。实验在一台无刷双馈发电机原型机上进行,其详细参数见表一。采用一台37 k W的三相异步电机作为原动机,与BDFG机械耦合,并由变频器驱动。PW和CW之间通过一个L型滤波器连接一个背靠背转换器,以驱动独立的BDFG系统。逆变器为CW提供频率可变的励磁电流。PWM整流器主要功能有(a)稳定直流母线电压,(b)实现能量双向流动。由于直流母线电容器在独立的BDFG系统启动前不充电,逆变器不能运行或向CW提供励磁电流。因此,应在系统中添加一个初始充电电路,对直流母线电容器进行预充电。初始充电电路中的限流电阻确保充电电流不会太大。当直流母线电压稳定,背靠背转换器开始工作后,可以关闭初始充电电路。PW相电压幅值和频率分别为311V和50Hz。所有参数均使用Ziegler-Nichols方法[9]调整 ,该方法不需要精确到无刷双馈发电机模型。
B. 恒定负载启动
图8为恒定负载启动的实验结果。如图8(a)所示,0.5 s时独立无刷双馈发电机在负载电阻6 kW启动,PW相电压的幅值以100 V/s的斜坡上升。从图8(a)和图8(b)可以看出,PW电压的d分量可以很好地跟踪PW电压参考幅值。为了调节PW电压相位角,PW电压的q轴分量在0.5s内不可避免地会发生瞬态波动。
图8. 恒负载起动的实验结果。转子速度保持恒定在600rpm,负载为6 kW电阻。a)PW线电压(1p.u.=500V)和CW相电流(1p.u.=50A)。(b)PW电压的d轴分量。(c)PW电压的q轴分量。
图9. 恒定负载下转子转速上升的实验结果。负载保持恒定在6kW的电阻负载下,转速从600rpm上升到900 rpm。(a)PW线电压(1p.u.=500V)和CW相电流(1p.u.=50A)。(b)PW电压的d轴分量。(c)PW电压的q轴分量。
C.恒负载变转速
实验1:图9为在恒定负载下转子转速上升的实验结果。转
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238327],资料为PDF文档或Word文档,PDF文档可免费转换为Word

