
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
关于船帆的空气动力学性能以及风帆船稳定性的研究
撰写人:何建海,胡怀义,唐娟娟,薛淑业
上海海事大学,海洋商业学院,第1550期海港杂志,中国上海,2013年6月版
文章信息
文章历史:在2014年10月20日被收录,2015年8月11日被修订
于2015年8月12日被接收,在2015年9月8日被淤血在网查询
关键字:风帆船;帆船空气动力学系数;船舶稳定性;计算方法
摘要:虽然风能对于能量保存以及减排的作用能被远洋船舶意识到,但这篇基于风力隧洞测设结果决定的有关船模的传动系数以及最佳的迎角的文章中,有关风帆船的稳定性判据计算方法是基于远洋船上对于在目前当代文献中远洋船的稳定性标准规定提出的。稳定性参数的计算方法是通过调查船模的可靠数据得出的。最后做出了相应船模,用以演示所提出的对于风帆船的稳定性的计算方式。
- 介绍
随着石油价格上涨,化石燃料资源枯竭,对于环境污染和气候变化的持续上升的关注,海上风力的使用应被考虑作为船舶动力的一种来源,风帆推进系统已经在船运业成为了一个热门话题,因为他节约能源以及环保的优点。海洋风力推进对于开的慢又很庞大的上传而言是一个更好的解决方案,提升船帆的性能是解决风帆系统导航技术的主要问题。
要提高能源节约以及减少排放,风帆技术在近二十年里急速发展,Fossati 分析了游艇软帆的运动状态以及帆和杆与空气之间的流体结构相互作用,Chapin 和Heppel以及Renzsh 和Graf调查了流体结构相互作用的问题,去解决有关结构变形带来的冲击,因此空气动力学产生了,游艇帆是软结构,所以空气动力问题是高深且非线性的。这个气动力弹性学的问题因为风的流动所以不稳定,更重要的是,游艇的行动取决于海的状态以及机组人员的动作。Gerhardt et al.2011 调查了在一个简化2D几何洞穴中不稳定空气动力学的现象与逆风向有关,Ouchi et al 2011 提出了一个新观点,“机动辅助推动帆船”,作为一个非常棒的节能船只,而且,平均来讲,有50%以上的推进能量来自海上风能,Fossati 和Muggiasca 2012,2011 研究了不稳定帆的空气动力学,包含了帆的弹性,还展现了帆船的俯仰运动是和空气动力学有紧密的影响,Fujiwara et al(2003,2005)研究了有着不同大小和不同横纵比的单一独立的混合型帆的空气动力参数,是在2003年和2005年混合型帆,帆对帆以及帆对船体的相互作用的辅助散货船,Masuyama st al。(2009)研究了帆的形状以及帆的航行性能对于迎风面已被验证的数值计算,li st al(2013)分析和设计了用模糊笔记里分调节控制理论的风帆船船帆控制系统,Meng et al(2009)在风帆的节能技术上做了研究,发现能量节约功效在4%到10%之间。Michalski et al(2011)完成了一个详尽的有关脉动风荷载作用下薄膜结构的研究Augier et al(2012,2013)进行了游艇航行中流固耦合非定常模型的实验验证和柔性游艇航行计划动态特性的数值研究。海事和海岸警卫局在2014年5月6日的典型航行情况。发布了大型游艇单元的稳定性信息手册,帮助帆船在温带航行条件下保持稳定。
这些研究主要集中在游艇的软帆结构上。未来远洋船舶的研究还需要进一步加强。本文在风洞试验的基础上,给出了适用于大型远洋船舶的弧形刚性帆模型的性能系数和最佳迎角,风帆船的稳定性标准要求是在现有海船稳性规范文献的基础上提出的。然后介绍了稳定性参数的计算方法,研究了风帆模型的合理性。对试验系统进行了描述,并采用所提出的风帆辅助船舶稳定性判据计算方法对最优风帆模型稳定性进行了校核。
2. 风帆模型的风洞试验和风帆选型
2.1。远洋船舶的帆型选择
就帆的形状、材料和横截面而言。帆的类型很多,有不同的特点,如方形、三角帆、软帆、硬帆、层流帆、圆形帆、圆弧帆、SY帆等。其他一些类型的帆已经获得了专利,如天帆、同向风管和翼型帆。远洋船舶的帆型选择应考虑以下几个方面:
推力性能好,风能效率高;
结构简单,重量轻,强度高;
能适应不同天气条件,耐阳光和海水侵蚀;控制灵活性和可行性有待提高;
相对于船体型较小,桅杆可自由旋转。
最新研究表明,弧形刚性帆由于其良好的气动性能、经济效益、长寿命和易于制造等特点,是满足上述要求的较佳选择(Ouchi et al., 2011)。
2.2。船帆的模型选择
选择了一种具有5种不同风帆参数(分别为A、B、C、D、E)的刚性弧形风帆,并进行了风洞试验,研究了其气动性能。刚性圆弧帆的结构如图1所示。定义两个参数来表示圆弧帆的结构如下:长宽比:风帆高度H与宽度C的比值。
外倾角比是指帆的厚度与宽度的比值。
风帆的种类及相应参数如表1所示。
2.3。帆模型受力分析
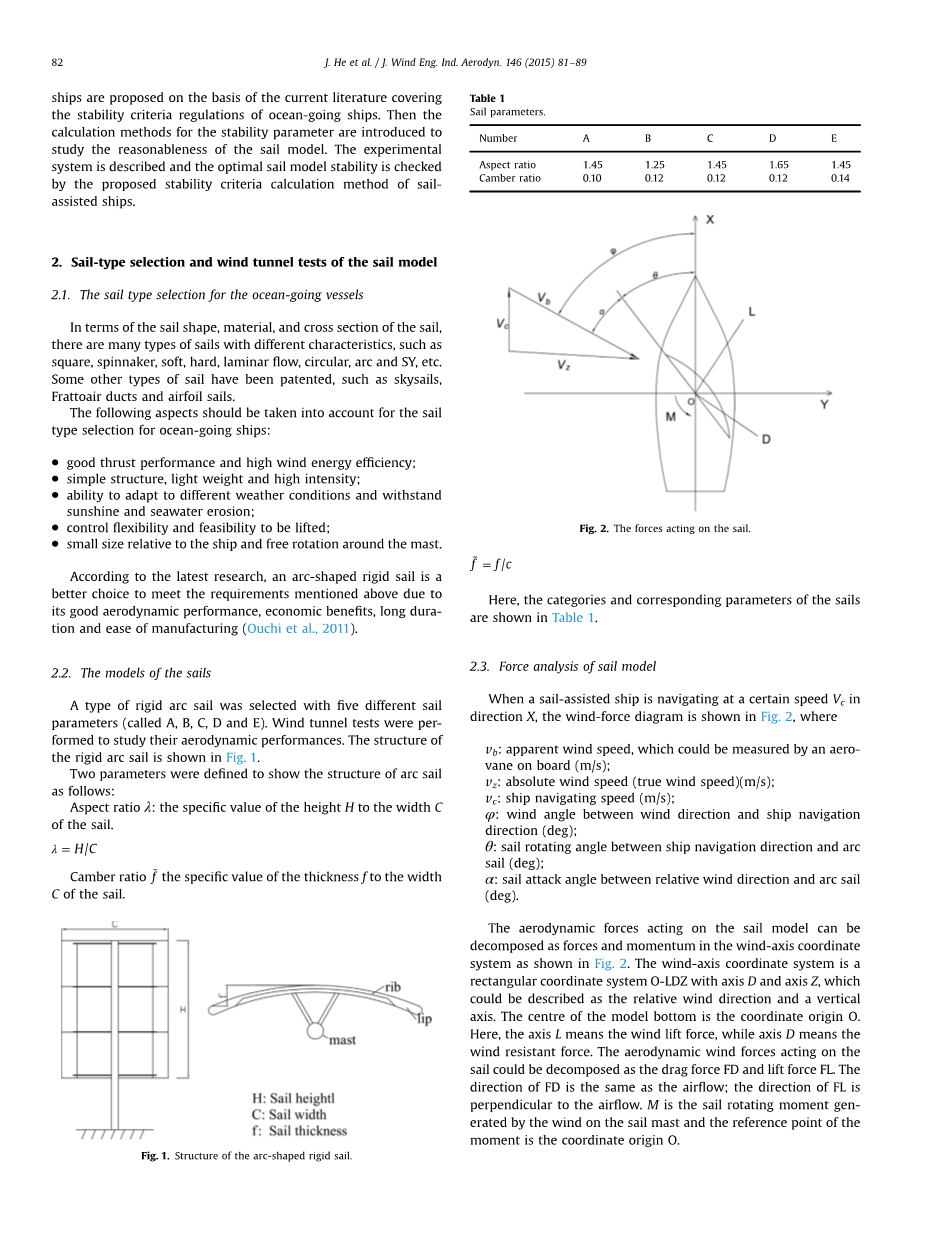
当帆船以一定速度向X方向航行时,风力图如图2所示,其中:
- 表观风速,可由船上的风叶测量(m/s);
- 绝对风速(m/s);
- 船舶航行速度(m/s);
风向与船舶航行方向之间的夹角角
- 船舶航行方向与风帆之间的夹角
- 相对风向与圆弧帆的迎角(deg)
作用在风帆模型上的气动力可以分解为风轴坐标系下的力和动量,如图2所示。风轴坐标系为直角坐标系O-LDZ,轴为D,轴为Z,可表示为相对风向和垂直轴。模型底部的中心是坐标原点O。这里,轴L表示风的升力,轴D表示风的阻力。作用在风帆上的气动风力可分解为阻力FD和升力FL, FD的方向与气流方向一致;FL的方向与气流垂直。M是由风作用在帆杆上产生的帆转动力矩,其参考点为坐标原点0。
因此,作用在船舶上的推力为(1)
作用在船上的漂流力是 (2)
推力和漂移力可以用无量纲指数的形式表示为(3)(4)
- 帆的推力系数;
- 帆的漂移力系数
- 帆的升力系数;
- 帆的阻力系数
- 空气密度
- 总帆面积(m2)。
此外,力矩系数Cm是一个重要的参数。根据Cm-a曲线,可以计算出风对帆杆产生的最小转动力矩,设计出帆的操纵机构来控制帆。弯矩系数定义如下:
由风帆上的桅杆产生的帆的转动力矩
- 帆弦长(m)。
2.4。风洞试验
试验中使用了一个风洞(见图3),这是一个吸收式、低速、直流风洞。隧道长14米,截面积为正方形。试验风速可在2m /s ~ 30m /s之间连续调节。收缩比为3.56,湍流度低于1%。由于90kW直流电风扇系统是由电脑控制的,所以风速可以轻松、准确地调节和控制。
风洞装有一个转动盘,可以由计算机控制。利用旋转角来模拟气流与风帆模型之间的不同角度。帆模型测力试验中使用的主要仪器有:
速度压力传感器(500pa);
底部支承五分量应变仪;
DH5920动态信号测量分析系统;
NI采样系统和计算机数据采集系统
在风速为15 m/s的均匀流场中对帆模型进行了测力试验,记录了a、B、C、D、E五个薄翼圆弧帆的升力、拖曳力、力矩的无量纲值。帆的迎角范围在-5°到90°之间,测量间隔为50°。升力系数CL、阻力系数Cp、力矩系数Cm等风帆模型的气动结果如图4-6所示。如图4所示,升力系数与帆的外倾角密切相关,而阻力系数则受帆面条件和帆后空气分离的影响。从5种不同展弦比和外倾角的风帆模型的C、Cp和Cm-a曲线上可以看出,升力系数、阻力系数和弯矩系数均表现为相同的变化趋势。升力系数和阻力系数曲线符合弧形帆气动性能的一般规律,分别如图4和图5所示。从5条C、CD曲线(图4、图5)可以看出,当风帆迎角在00 ~ 30之间时,GL和Cp变化都很剧烈,Cl随着a的增加比Cp的变化率更高。当迎角达到一定值(约309)时,G达到最大值,即,一个转折点。然后,G,开始降低rapidlv,而Cn继续增加。
由于圆弧帆的工作原理与机翼空气动力学相似,所以在CL-o曲线上出现的拐点称为失速。主要原因是当帆面迎角较大时,帆面后方会发生涡流分离。从Cm-o曲线可以看出,Cm在Gi-x曲线的拐点处达到最小值。当作用在帆上的风升力达到最大时,推力也达到最高。根据五种风洞模型的风洞试验结果,风洞模型E能够获得最大的升力系数C和最小的力矩系数Cm,风洞的气动性能最好,如图4和图6所示。从图4和图6可以看出,最佳的帆角范围在25o到30o之间,相应的转矩系数Cm也达到了最优值,即当帆处于最佳的帆角位置时,作用在帆上的风升力最大。根据公式(3)和(4)和风洞测试,推力系数和相应的帆模型的漂移力系数E计算在不同风角度和最大推力系数和漂移力coeffi字母系数得到基于这些计算结果如图7所示。根据风洞试验,在不同的风向角下,可以得到与最大推力系数相对应的最佳风帆迎角。最优航行根据风向角与帆迎角的函数关系可以计算出转角(见图2),由此可分别得到可行的风帆旋转范围和最佳的风帆攻角,最佳的风帆攻角曲线和最佳的风帆旋转曲线如图8和图9所示。从图7可以看出,当风向角小于17°时,船上的风帆没有推力,甚至成为阻力。此时,漂移力相对较大,对船舶极为不利。在风向角为68°时,最大推力等于最大偏航力。当风向角大于68°时,最大推力大于最大漂移力,最大推力稳步上升至最大值(约120°)。最大偏航力随着风向角的增大而逐渐减小。为了使船当然尽可能小,产生的最大推力同时,帆应该升起的风向角大于68°和卷起的风向角小于68度达到最好的效果。根据图8所示的最佳风帆迎角曲线,风帆控制机构可以在不同的风向角下调整风帆。风帆在风向角处的最佳旋转角度如图9所示,风帆的旋转角度可通过风帆操纵机构进行调节,以保证风帆的最佳工作状态。
3.帆船稳定性研究
远洋帆助船舶的稳定性要求是为保证船舶在海洋、风或其他外力作用下倾覆时的安全而制定的技术规范。船应该有能力回到垂直位置(Yang, 1996)。船舶安装好帆后,应重新检查静稳性和动稳性。在船舶稳定性计算中,既要考虑小角度的初始稳定性,又要考虑任意倾斜角的整体稳定性。在船舶静稳性计算中,可以忽略船舶的倾斜速度,采用扶正力矩法来测量船舶的静稳性。在动力稳定性计算中,应考虑船舶的外力力矩和倾斜速度。船舶承受外力的能力是根据船舶的扶正力矩所作的功来衡量的,扶正力矩在数值上等于船舶在横倾角作用下的静稳性曲线所围成的面积。
由于风的作用,帆船与传统动力船舶相比具有一些不同的特点。风帆船技术的稳定性校核方法是帆助技术应用中的主要工作之一(Tsai 和Haciski,1986;Cleary et al,1996)。
3.1点。帆船的稳定性要求
船舶在受到外力和外力矩MH作用下恢复平衡位置的能力称为船舶稳定性。复原力矩Mp是衡量复原能力的重要指标(MSA, 1980)。稳定性计算包括浮力条件、初始稳定性、大角度稳定性、静稳定性、动稳定性以及各项指标的计算和测量。
考虑风帆的阻尼效应,有必要对横摇角进行修正计算。如果帆在航行中展开,那么施加在帆上的载荷就很大,由于风浪的作用,船舶的倾侧力矩就会增大。稳定性判据K的计算取决于船舶的总弯矩、风浪的横倾力矩和船舶的横摇角。船帆安装后,船体重量分布会发生变化,这将影响参数的计算和静稳性曲线的绘制。
帆助船舶的推荐稳定性标准包括:
- 稳定的标准
- 初稳心高度
- 静倾侧角
3.2。稳定性参数的计算
3.2.1之上。最小倾覆力矩的计算最小倾覆力矩为船舶所能承受的最大横倾力矩,也反映了船舶在最危险情况下所能承受的横倾力矩的极限。如果横倾力矩达到或超过该标准,则船舶将发生倾覆(Yang, 1988)。
最小倾覆力矩的计算与横摇角、浸水角及静稳性曲线所围合的面积有关,如图10所示,其中0表示船舶在梁海中的最大横摇角为
在船舶装载条件下,龙骨上方的重心高度(m)。
- 如果,则;若,则
C1、C2、C3是与船舶和航行区域基本特征相关的系数,可以通过相关信息确定(Shen et al., 2001)。CA是由风帆产生的减摇效果的影响系数,定义为
- 总帆面积(m2);
- 垂线间长度(m);
- 船宽(m)。
图10中的取值通常从泛洪角度50°或(与静稳性曲线的第二个交点)取最小值。a和b的围合面积分别为横移力矩和扶正力矩所做的功。风力的作用下滚动,每个标准船舶荷载条件下的稳定性应满足要求区域b等于或大于区域a。这里提出的稳定模量的概念是b和a的绝对值之比。当稳定模量为1时,最小翻转杆为GZ值。对于静稳性曲线,GZ=,GZ=f()关于原点是对称的,当Sb=Sa时
倾覆力矩,可以描述为
排水量(kg)
3.2.2。风倾侧力矩的计算作用在船舶上的风倾力矩称为,表示在风浪条件下作用在船舶上的风动力力矩。包括作用在船帆上的力矩和作用在船舶结构上的力矩 两部分(Luo et al., 1986):
船舶不仅要靠帆的升力推进,还要冒着被拖曳力掀翻的危险。当风以风角的视风速Vb向船舶吹来时,风帆上的气动力分别产生升力、阻力和桅杆上的转动力矩M。帆的力矩主要由侧向力和风压臂产生,如下图所示:
;船体横向风压系数
- ;空气密度
- 视风速(m/s)
总帆面积
-
船舶侧面投影面积(m2);<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236768],资料为PDF文档或Word文档,PDF文档可免费转换为Word

