
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
混合动力多功能船舶的并行控制
摘要:多功能船舶(尤其是军舰)需要在保持高机动性的同时减少燃油消耗,主柴油机和电力推进并联运行的混合动力推进系统是一种实现方法。然而,该方法需要开发并行控制策略。本文建立了上述混合动力并行推进系统的仿真模型,研究了两种并行控制策略用于多功能船舶的可能效果。对于所研究的护卫舰,基于两台4MW电力驱动器和两台10MW柴油机的并行控制,使其最高速度相对于无并行控制的基线控制增加了3海里/小时。主柴油机转速和电机转矩控制并行策略可使船舶的加速度提升17%,可使热负荷降低150K。电机转速和主柴油机转矩控制并行策略可使船舶的加速度提升40%,同时可以消除其在恶劣海况时的热负荷波动,并且可以降低主柴油机平均150K的热负荷。基于自适应螺距的电机转速控制和动力优化分配控制策略,有望在将来进一步改善船舶混合动力推进系统的性能。
1.引言
在上个世纪90年代,游轮工业对电力推进产生了极大的兴趣,因为它能部分提供游轮所需的功率。从那时起,电力推进就成功的的用于渡轮、动力定位钻井船、电缆布设船、破冰船、拖船、海军船只甚至是军舰(Moreno 和 Pigazo,2007;Hodge 和Mattick,2008;Loyd等人,2003)。然而,在全负荷时发电机、变压器、变频器和电机的能量转换损失极大,电力推进的效率很低。因此,电力推进目前被用于负荷需求范围较大的船舶和一部分推进负载更加生活化的船舶。
作为船舶推进动力的替换品,在高速时,混合动力推进直接驱动柴油发动机和汽轮机,使其达到高效率,在低速状态下,发电机灵活的通过电力推进和生活负载的需求来选择发电能力(Geertsma等,2017)。这一种概念特别适合某些情况下要大推进负荷,而在其他情况下只要一个满足基本需求的推进负荷的船舶。(de Waard,2015年)。例如,混合推进已用于海军护卫舰和驱逐舰(Castles和Bendre,2009年)、拖曳舰(breijs和Amam,2016)、近海舰(Barcelios,2013)和游艇(van Loon和van Zon,2016)。
在大多数混合动力推进的应用中,船舶在直接机械模式(主机推进)或电气模式(电机推进)下工作。但这些应用都没有发挥出混合动力推进的全部潜力。首先,当主机运行的时候,电力驱动可以有效地发电,从而柴油发电机可以停止运行。第二点,电动机可以辅助主机,例如可以提高主机加速性能,减少主机的热负荷或者提高上限速度。然而,要并行运行主机和电力驱动,需要一种先进的控制策略。
迄今为止,人们对主机和电力驱动的并行控制的研究极少(Geertsma,2017;sulligoi,2012;Topaloglou,2016)。Sulligoi等人(2012)研究过在FREMM护卫舰上的主汽轮机的轴带发电机的运行情况。然而,他们的研究专注于电力驱动的转速控制和柴油发电机的电压下限的并行控制。因为主汽轮机有一个非常宽泛的运行范围,使它对轴带发电机上的力不敏感,所以这里的推进动力不必详细作考虑。此外,Topaloglou(2016)为了降低主机热负荷,进行
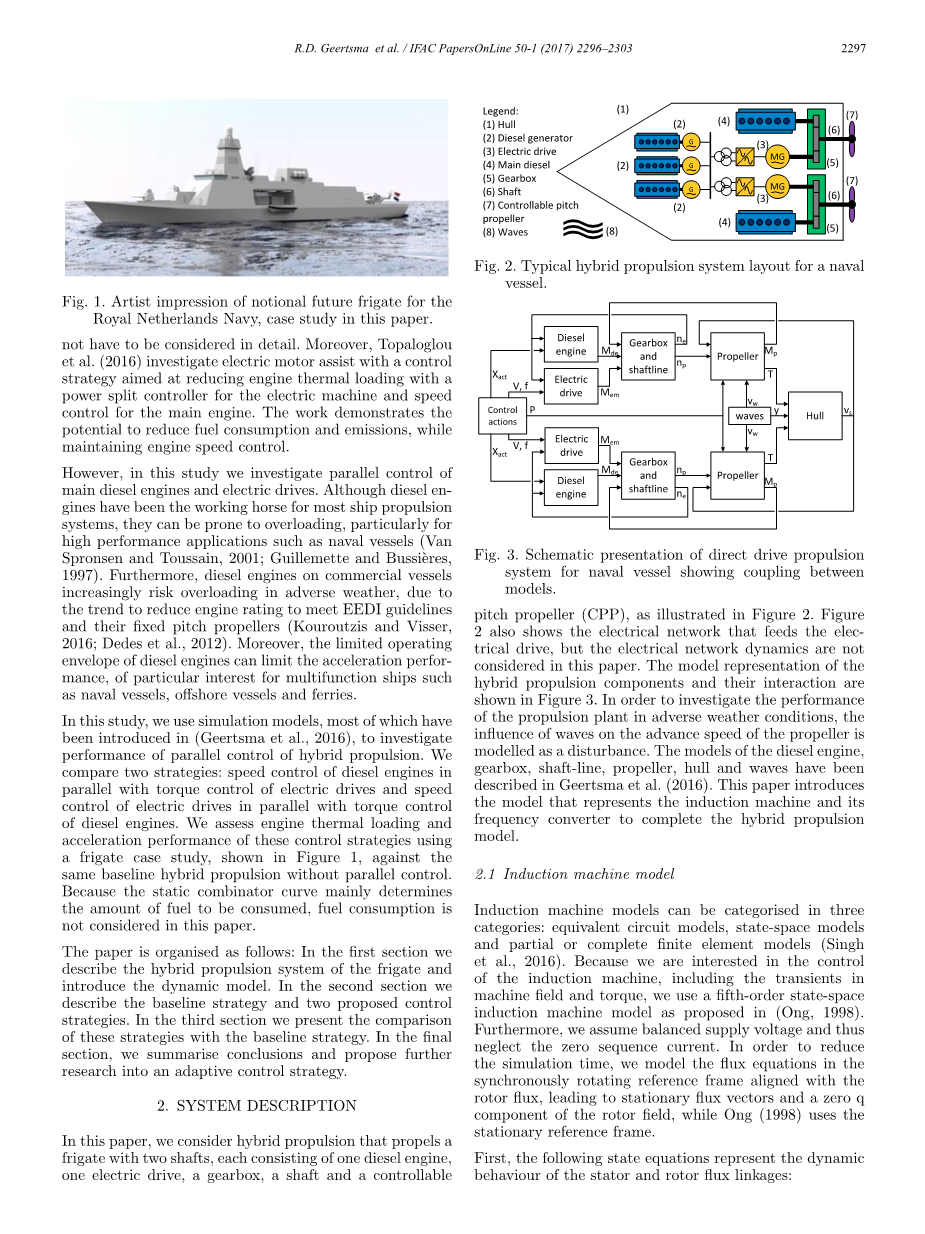
图1未来护卫舰的设想
了一个电动机协助控制策略的研究,这个控制策略通过调控电机的功率分配器和主机的速度控制来降低热负荷。这项工作显示了主机保持转速控制时,电机协助主机降低燃料消耗和排放的潜力。
然而,本文主要是研究主柴油机和电力驱动的并行控制。虽然主机在大多数情况一直是船舶的推进系统,但它容易过载,尤其是一些高性能应用,例如海军船只(Van Spronsen和Toussain,2010;Guillemette和Bussieres,1997)。而且商用船舶为了满足船舶能耗设计指数和固定螺距比,减少了发动机额定功率,这使商用船舶在恶劣天气下有过载的风险(Kouroutzis和Visser,2016;Dedes等人,2012)。此外,船舶的加速性能对于海军船只、近海船和渡轮很有用处,但船舶的限制性运行范围会限制其加速性能。
在这次研究中,使用仿真模型来研究混合推进的并行控制的性能,其中,大部分模型我们已经在文献(Geertsma等人,2016)中介绍了。比较这两种策略:主机的转速控制和电机转矩并行控制;电机的转速控制和主机转矩并行控制。以一个护卫舰为例,通过比较并行控制策略与没有并行控制的基线控制策略下的热负荷和加速能力,来评估混合推进的并行控制的性能,如表格1所示。由于其静态组合曲线决定燃料消耗量,故此论文中不考虑燃料消耗量。
论文梳理如下:第一节中,描述了护卫舰的混合推进系统,并且介绍了其动力学模型。第二节中,描述了基线策略和两种拟议的控制策略。第三节中,将这些策略和基线策略相对比。最后一节中,进行总结,并提出了对自适应控制策略的进一步研究。
2.系统描述
在本文中,我们认为混合推进是通过两个轴系来推动一艘护卫舰,每个轴系由一个主机,一个电力驱动,一个变速箱,一个轴和一个可控螺距螺旋桨(CPP)组成,如图二所示。图2为给电力驱动供电的电网系统,但本文没有参考
图2经典军用混合推进系统布局
图3直接驱动原理图
电网学。图3展示了混合推进部件的模型以及其间的相互作用。为了研究推进装置在恶劣天气下的性能,以波浪对螺旋桨前进速度的影响为扰动建模。Geertsma等人将主机、变速箱、轴系、螺旋桨、船体和波浪以模型的形式描述出来。本文介绍了以感应器和变频器组合构成的混合推进模型。
2.1感应器的模型
感应器模型可分为三类:等效电路模型,状态-空间模型和部分或整体有限元模型。因为我们对感应器的控制,包括感应器的瞬态和转矩很在意,所以我们使用了(ong,1998)中提出的五级状态-空间感应器模型。此外,我们假设电源电压恒定,从而忽略了零序电流。当时ong用的是静止参考系,为了减少仿真时间,模拟了旋转参考系中的转子磁通量方程,得到了一个静止的通量方程和一个转子磁场的零序分量。
首先,以下状态方程表示定子磁场和转子磁场的动态行为:
其中是以V为单位在旋转参考系中的定子磁场的正交磁通分量,是以rad/s为单位的基础频率,是以V为单位的定子正交电压,是以Omega;为单位的定子电阻,是以Omega;为单位的定子自感,是以V为单位在旋转参考系中的互感磁通量的正交分量,是以rad/s为单位的在旋转参考系中的频率,是以V为单位在旋转参考系中的定子磁场单位磁通量的直接分量,是以V为单位的定子电压直接分量,是V为单位在旋转参考系中的单位互感磁通量的直接分量,是以V为单位在旋转参考系中的转子磁场的单位正交磁通分量,是以Omega;为单位的转子电阻,是以Omega;为单位的转子自感,是以rad/s为单位的电磁转子转速,是以V为单位在旋转参考系中转子磁场的单位直接磁通分量,是旋转参考系中定子相对角,感应器轴转速决定了电磁转子速度,如下所示:
这里的是电机电极对数量。
第二点,以下公式可以表示定子与转子之间磁通量的关系:
其中是以Omega;为单位的等效电感,是以Omega;为单位的互感。
第三点,在旋转参考系中转子和定子的直流和交流电流量可以表示为,并在由以下公式推导:
我们用Parkrsquo;s转换法(ong,1998.ch,5p.142)可以得到电流的相位值,这些电流的相位值可作为控制器的反馈。
最后,电磁转矩在感应器中可由以下公示表示:
2.2变频器模型
本文以机械动力学的角度研究混合动力推进并行控制。本次研究不涉及电网动力学。由于现代频率驱动的响应时间在毫秒范围内,而机械动力响应时间在0.1s的范畴,所以我们假设感应器具有理想的电压。因此,变频器的模型也为感应器提供理想的电压和频率。文本第三节中主要探讨了提供电压和频率的控制策略。
3.控制策略
3.1基线控制策略
在基线控制策略中,单由主机提供推进力让船保持高速。基线控制的主要控制目标是提供推力使虚拟轴保持转速(以rpm为单位),的结果可由螺距比P和轴转速推导而出(Vrijdag 等人,2008),具体如下:
其中是螺旋桨传递推力为零时的螺距比,是标准螺距比。
Marteli(2014)和Geertsma等人(2016)提出的组合曲线指出了虚拟轴转速设定值,主机转速设定值和螺旋桨螺距比设定值之间的关系。这种组合曲线可以保证发动机在设计条件下正常工作。这个基线控制策略的组合曲线如图4可见。因为在最大轴速度下可用功率减少,所以要注意基线控制策略下的螺距比(1.48)要低于并行控制策略下的螺距比(1.8)。此外,混合动力推进装置的螺旋桨将根据Stapersma提出的主机和电动机可用功匹配程序来进行匹配(2005)。
图4柴油机混合动力的基线控制策略和并行控制策略的组合曲线
图5速度控制和转矩控制的机械推进控制回路
用组合曲线的速度设定值控制主机转速是基线控制的主要控制策略。柴油机转速控制原理如图5所示。控制器算法定义如下:
这里是以%为单位的燃油泵设定值,是速度控制的增长比例,是速度控制的复位率,是以%为单位的参考速度,是以rev/s为单位的发动机标定转速。
Vrijdag等人提出通过限制加速度,来防止主机出现热负荷超载的情况(2010)。虚拟轴加速度达到0.75rev/s时,主机负荷维持在正常运行的范围内,如表四显示,我们将得到的速度控制参数结果列于表1。
Geertsma(2016)等人提出,在所有控制策略中,螺距控制行为和液压推进行为都被简化成一阶线性延迟行为。如Godjevac等人讨论,CPP中的非线性延迟行为造就了非线性建模策略的选择,这项理论被Wesselink等人(2006),Martelli(2014)和Martelli(2014)等人提出。
图6间接磁场定向控制策略示意图
表1.速度和扭矩控制参数
3.2发动机转速控制和电力驱动扭矩并行控制
这种控制策略中,次要控制目标是在保正主要目标:提供要求的虚轴转速的同时,协助柴油机推进,来达到更高的速度和加速度。我们既保证了发动机的转速,又通过电机提供给轴系额外的转矩。Blaschke(1974)和Hasse(1969)提出了定向控制电机转矩的理论,并在Sudhoss(1998)Trzynadlowski(2001)和Ong(1998)等人的研究下更加深入(1998)。图6表示了本文用到的间接磁场定向控制策略。
Iqs和Ids是以A为单位的参考交流和直流电流,他们由转子(以N为单位)的转矩参考值Tem和以V为单位的直接磁通分量量参考值Psi;dr决定。
和是以A为单位的在旋转参考系中电流的正交分量和直接分量,它可以被由定子电流场和互感磁场中测得的(以rad/s为单位)计算得出:
之后,用PID控制获得正交分量和直接分量Q和D。如下所示
这里的,和,是是由手动调整决定的增长和重置率,如表1所示。
最后,像(Ong,1998,CH,9,pp.448)中所叙述的那样,这个解耦公式被用于获取电压直接分量和正交分量。
通过Clarkersquo;s的转换法(Ong,1998,Ch.5 p.142)可以获得电压的相位值。这些假定理想电压源的电压相位值被作为变频器的参考值。
转矩控制中的是以Nm为单位的相对转矩设定值,它是虚轴速度的函数组成部分,它的组合曲线如图4所示。因为我们打算研究主机速度控制和电机速度控制的不同,所以将并联下的主机和电力推进进行等功率分配。这些并行控制策略都可以和Sciarretta等人(2014)Koot等人(2005)提出的先进的优化功率策略相结合。此控制策略的速度和节距设置都和基线策略中的相同。如图4显示。
3.3电力驱动速度控制和发动机扭矩并行控制
这种控制策略的首要目标是满足虚拟轴的需求转速来推动船舶,次要目标如下所示:
·由于电动机通常在额定扭矩下能最有效的运行,故充分利用电动机扭矩提高船舶加速度。
·通过在恒定扭矩下运行发动机来实现来减少发动机热负荷和热负荷波动。其中气缸峰值温度被作为热负荷指标。
电力推进的速度控制,是通过在扭矩控制器前加一个额外的速度控制回路实现的,如下所示:
这里的是感应器的参考速度,它的(转矩)组合曲线如图4所示。
就像Geertsma等人所提出的那样(2016),转矩控制回路控制主机,如图5所示。这里的油泵设定值是由主机转矩推导而出的,如下所示
这里的是以KNm为单位的发动机常态转矩,这里的发动机转矩设定值是虚轴速度的一个函数组成部分,它们都如图4的组合曲线所示。
4.实验结果
4.1模拟实验
在本文中,我们以护卫舰为案例研究混合动力推进。混合推进装置的参数是取自于Geertsma等人文献中的的数据(2016),如表2所示。我们调查了5号海区的恶劣天气情况。在一台i5处理器和8gb内存的电脑上使用matlab和Simulink R2104B软件来模拟混合推进装置。
在模拟实验中,我们从t=200s开始,研究了虚轴转速在设计条件下从44rpm到最高134rpm的加速策略,如图7所示。图8中的结果表示了在加速过程中,发动机负载满足并略微超过了临时工况限制。因此,我们选择了将加速度限制作为设计条件下的限制之一,并由此构建了控制策略和组合曲线。
4.2发动机转速控制和电力驱动扭矩并行控制
图7中,发动机转速控制和电力驱动扭矩并行控制的仿真实验表明,船舶加速过3kts(海里/小时)或处于更高的速度时:由于电机的附加转矩,船舶从10kts加速到20kt
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235558],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

