英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
发电机传动系统
风力机的转速比发电机理想的转速低的多,因此,需要用齿轮传动加快风力机的速度,本章所描述的就是一个可以定速或变速运转的系统。
第三章推导的风的功率方程如下:
CP=风力机功率系数
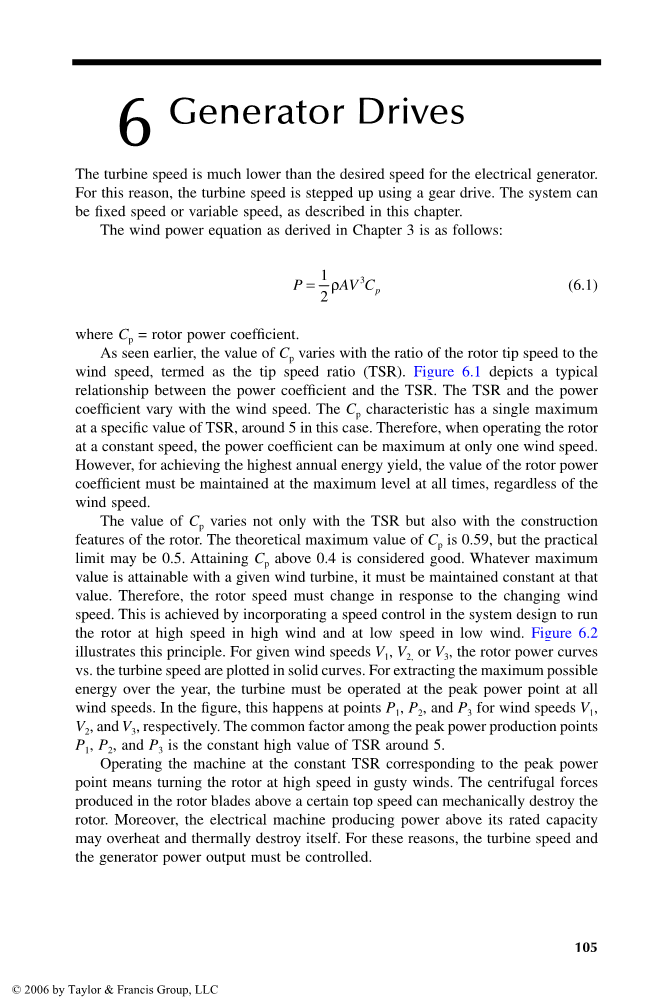
如前所见,CP值的变化与转子前段相对于风的速度的比值称为尖速比(TSR).图6.1描述了功率系数和TSR之间典型的关系。TSR和功率系数随着风速变化而变化。在一个特定的TSR值下,CP会出现一个且只有一个峰值。在下图的案例中,TSR约为5左右时,CP最大。因此,当转子转速不变时,在一个特定风速下,风力机功率系数可以是最大的。然而,为了实现年能量产量最高,转子功率系数的值必须在任何时候保持最高水平,无论风速是多少。
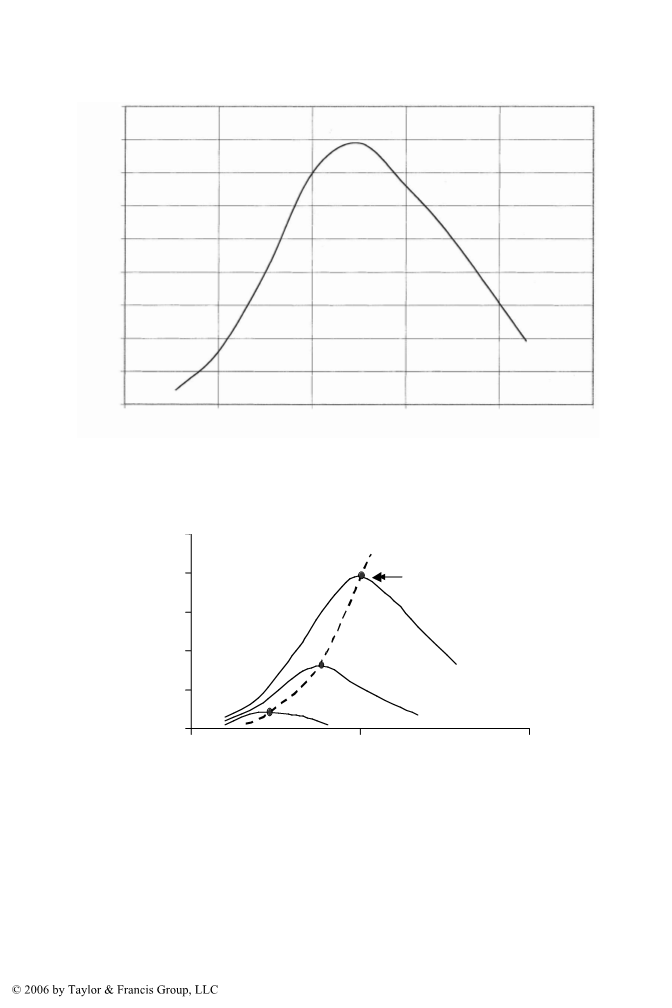
CP值的变化不仅与TSR有关还与转子的结构特点有关,CP的理论的最大值为0.59,但实际极限值为0.5,CP达到0.4时就被认为很好了。对于给定的风机,无论CP可达到的最大值是多少,但这个值一定是个不变的常数。因此,当风速改变时,转子的速度也必须相应的改变。通过一个速度控制系统实现转子在高风速时高速运转,在低风速时低速运转。图6.2说明了这一原理,对于给定的风速V 1、V 2、V 3,描绘出转子功率与风力机转速关系的实曲线,为了在一年中获取最多的能量,风力机需在功率峰值处运行。在此图中,这发生在点P 1、P 2、P 3对应的风速分别为V 1、V 2、V 3,功率峰值P 1,P 2和P3处的TSR在5左右,此时转子功率系数最大。
设备在某个TSR的值对应着功率峰值处运转意味着转子在出现阵风时高速运转。当转子上叶片的速度达到一个很大的值时,转子会受到一个很大的离心力从而受到机械性的损坏,此外,电机产生的能量高于其额定容量时,会由于过热而损坏。由于这些原因,必须控制风力机的速度和发电机输出的功率。
尖速比TSR
风机功率系数CP
图6.1 风力机功率系数(CP)与尖速比(TSR)之间的关系
功率
最大功率点
风力机转速
尖速比TSR
图6.2 不同风速下的风力机功率与转子速度特性,风速增加时,功率峰值点会向右移动。
6.1速度控制区域
风力发电系统中转子速度和功率控制有三个不同的区域,如图6.3所示,其中实线是功率效率,虚线是转子效率,如下:
转子功率系数CP
常数CP
风速 m/s
发电机功率限制
图6.3 系统中的三种不同的转子速度控制区域
最佳的常数CP区域,产生的功率随着风速的增加而线性增加。
功率限制区域,产生的功率恒定不变,不随风速变化而变化。
功率切出区域,随着风速增加到最高风速限制,产生功率呈斜坡状下降至零。
通常情况下,当风速超过4m/s至5m/s时,风力机开始工作,并在风速超过25m/s至30m/s时停止工作。风速在两者之间时,它工作在上述三个区域中的一个。在一个典型的风力发电站,风力机可以运行约70至80%的时间。其他时间,因为风速太低或太高而不工作。
最佳的常数CP区域为正常工作模式,速度控制器使系统工作在最佳常数CP区域,而这个常数的储存在计算机中。在4.4节中会描述可代替的两种在这个区域控制速度的的方案。
为了维持CP值恒定不变,控制系统必须在风速增大时使转子转速也增加,直到要超出这一个区域,当到达下一个区域时,也就是在功率限制区域进行速度控制,这时CP值已经不是一个最佳的值了,风力机功率效率也会受到影响。
如果风速继续增大,使系统到达发电机的功率限制时,风力机的转速会下降,功率系数CP也会远离它的最佳值。发电机的功率需要保持在设计的极限之内,当由于一股极强的阵风使风速和功率超出限制时,设备会自动切断停止发电。
控制风力机转速和发电机输出功率的传统方法如下:
一、桨距控制:通过机械装置和液压装置控制叶片间距,从而控制风力机转速。当叶片间距随着风速的变化而调整时,发出的功率会在额定功率值的上下波动。由于转子有很高的惯性,所以这种调整需要一定时间。图6.4描述了风速、叶片桨距角、发电机的转速、输出功率随时间的变化,此图像是来自于维斯塔斯公司OptiSlip品牌的1.65兆瓦的风力机(维斯塔斯是丹麦的一个风力发电公司,OptiSlip是注册商标名称)。即使发电机转速有10%的波动,发电机输出的功率也会保持恒定,这极大地减小了电网中不必要的波动。这样一个有弹性的系统也减小了风力机和基座上的应力。
二、失速控制:风力机在高风速下采用气动失速的方式来调节风轮的速度。发电功率的峰值比额功率限制略高时,然后发电功率会急剧下降,直到风速达到需要切断发电装置的风速时。在这时,风力机停止转动,发电量下降到零(图6.5)。
发电机转速rpm
功率输出Kw
叶片桨距角°
风速m/s
1.65兆瓦的风力机实际运行时各项参数随时间的变化
图6.4 风速,桨距角,发电机转速,输出功率在风速波动时随时间的变化。(数据取自维斯塔斯风力系统,1650kw涡轮机)
----- 失速控制
桨距控制
风速m/s
功率输出 %
图6.5 在使用桨距控制和失速控制调整时发电机功率输出的变化。
在上述两种速度调节的方法中,现实情况下发电机的输出功率在大多数时候不是稳定变化的。在任何瞬间,都会给出一个产生功率的理论近似值。例如,风力机在相同速度时产生的功率可以不同,功率的大小取决于此时风速是正在增加还是正在减少。
6.2 发电机的传动
在系统的设计中必须在风速变化之前就要提前确定并控制发电机的转速。这是很重要的,因为它决定了所有主要元器件及其容量。发电机驱动策略和速度控制的方法可以分为以下几类。
6.2.1 单定速度驱动
发电机以恒定速度运转可以使系统设计更加简单,这当然非常适合使用异步发电机,因为异步发电机的固有特性就是转速不变。然而,风力机的转速通常是很低的,而发电机需要在高转速下工作才更有效率。为了解决这个问题,通过变速齿轮连接风力机和发电机,从而使发电机的速度远高于风力机。变速齿轮降低了风力机的转速、增大了涡轮风力机机的扭矩,从而提高了转子的功率系数CP。不同风速下,电磁扭矩和功率的增加或减少都伴随着转子转差率相应的增加或减少。风力发电机工作时的转差率一般在百分之几左右,更高的转差率对传动此轮更有益,但是会增加转子中的电损耗,这就会导致转子冷却更困难。
对于定速风力机来说,年度能量产量必须根据有关地点的给定风速分布来分析。以为这种方案中风力机的速度是恒定的,所以并不担心它会运行在额定速度以上,但发电机轴上的转矩必定会增高,因此发出的功率可能高于额定容量。当发生这种情况时,发电机通过跳开断路器而切出运行,甩掉负荷,系统功率会降为零。
固定速度运行的主要缺点在于,他几乎不会以最大效率(用风轮效率CP表示)捕获风能。当风速高于或者低于某个选定的最优值时,风能就被浪费掉了。
在发电机运行于恒定转速的条件下,年产能却决于风速和传动比。图6.6描述了年产能和传动比的关系,他是这种系统的典型关系曲线。可以看到,年产能高度依赖于选定的传动比。对于图中给定的风速分布,该风力机的能量产出在传动比为25时达到最大。因此选择传动比时,考虑选定地点的平均风速是很重要的。风力机运行的最优传动比随风电场的变化而变化。
因为年产量偏低,所以定速传动一般限于小型发电机使用。
年度能量产量
齿轮传动比
图6.6在一种固定速度的驱动下,对于给定风速,年度能量生产随着齿轮传动比例强烈变化
风速m/s
产生的功率
低传动比
高传动比
图6.7 在低传动比和高传动比时,变化风速产生的功率概率分布
6.2.2双定速传动
双速电机可以提高能量捕获,降低转子的电损耗和齿轮噪声。速度通过改变传动比来改变。根据风电场期望的风速分布选择两种运行速度以优化年产能。显然,在两个传动比下发出峰值功率的风速V1 和V2必然位于期望年平均风速的两侧,在图6.7所示的特例中,当风速低于10m/s时,系统运行于低传动比;当风速高于10m/s时,运行于高传动比。该例子中,运行在风速为10m/s时,可能会引起传动比的变化。
在美国早期的设计中,采用两台不同的电机实现双速,通过皮带传送在两台电机之间切换。一个经济有效的方法是将异步发电机设计成可以运行在两个速度上。有两套不同极对数的定子绕组可以运行在两个或者多个相关联的速度上。此外,变极电机有一套定子绕组可以改变其连接以给出不同的极数。符合系统要求的独立绕组是首选,因为速度改变肯定不会失去对电机的控制,但是独立绕组在空间上难以安排。
在单绕组变极方法中,定子的线圈可以链接为P或2P个极。鼠笼转子则不需要任何改动,实际上也是不可能的。用于低速运行的定子接法的极数是高速运行时极数的一半,保持TSR在接近最优的水平,以产生高转子功率系数CP,而电机只运行在一个速度比例2:1。
4极磁链模式
8极磁链模式
图6.8 速度比为2:1时的变极定子绕距
图6.8显示了变极定子绕组的一相。相对于更高极数,线圈是串联的;对于较低的极数是串-并联的。由此磁链模式分别对应于8极和4极。对于较高的极数,通常采用双层绕组,电气间隔120°。在这样的绕组中,一个重要的设计考虑是限制空间谐波,因为他在发电模式下可能会降低效率,而作电机运行时,可能会在启动阶段产生蠕动。
定子绕组一旦绕成,其线圈节距就是固定的,但是其电气距离取决于极数,对于8极连接方式,线圈节距占圆周1/8的事整距线圈,对于6极接法就是2/3,对于4极接法来说就是1/2,必须避免过窄的线圈节距。对于速度比为2:1的发电机,可能的线圈节距对于较大的极数来说是1.33极距,对于较小的极数来说是0.67。每种情况下,线圈节距因子为1.0和0.71,则可以避免低速运行时漏抗过大。
采用定桨距、失速设计风轮的双速技术在小型风力机(<1MW)中仍然适用。
6.2.3变速齿轮传动
采用变传动比的变速运行方式过去曾被考虑过,但其增加的问题比带来的好处更多,因此一般不用这类传动。
6.2.4 变速电力电子技术
在一些风力机中,先进的电子控制系统持续调整风力机的叶片桨距角,使其在任意风速下获得最优转速,并得到最大升阻比。变速运行使风力机保持在最高效率水平的能力最大化。定速风轮必须被设计成能够偏离高阵风负荷,而变速运行来至阵风的负荷被吸收掉,并转化为电能。发电机的转矩必须通过变频器控制,该控制策略允许风力机风轮在强阵风时升高速度,因而降低了传动系统的转矩负荷。变速风力机的运行速度范围显著宽于采用其他技术的速度范围,后者在强阵风下调节功率时发热而不是发电。变速运行系统也提供了整个风力机系统的主动阻尼,与恒速风力机相比,显著减小了塔架的震动。电机的主动阻尼也限制了峰值转矩,提供了更高的传动系统的可靠性、更低的维护成本和更长的风力机寿命。
现代变速传动系统采用电力电子装置将发电机的变压变频输出转换为定压定频输出定频输出,该系统和航空电源系统中的技术相似。不断下降的电力半导体器件成本推动了这种系统的应用。虽然可以采用常规的晶闸管整流器和逆变器,但是在风力发电工业的现代设计似乎更倾向于脉宽调制晶闸管。速度比例在理论上是没有限制的,但实际中限制在3:1,这比前述变极方法和下文要描述的歇尔皮斯得到的要大。变速系统能量产量更高,旦增加的成本和电力电子装置的电损耗抵消了部分收益。在大型系统中,成本和收益折中一般都是正确的。
除了更高的年产能之外,变速电力电子系统提供了电能质量的远程调整和控制。这有其他系统所不具备的两个主要优势:
- 远程控制的机会:这使得它更适合离岸应用;
- 精确调校以实现最好的并网:这得它更适合于满足发展中国家娇弱的电网需求,例如中国和印度。
基于电力电子技术的变
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146284],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

