英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于以太网的船舶网络控制系统仿真研究
摘要
随着网络化控制系统的广泛应用,船舶网络化的研究变得越来越重要。本文通过实时网络工具箱介绍了基于半实物仿真平台的船舶网络化控制系统。为了解决网络控制系统中随机时延和丢包问题,采用自适应模糊PID控制算法对模型进行仿真,仿真结果验证了该算法的可行性。
索引词
船舶网络控制系统 自适应模糊PID控制 随机延迟 实时网络工具箱
1.简介
当传统的反馈控制系统在与其他网络节点,如互联网,通过通信渠道进行数据共享形成一个闭环控制系统时,该系统可以被定义为一个网络控制系统(NCS)。网络控制系统从控制技术、计算机技术和网络通信技术发展出来。网络控制系统具有控制系统网络化、信息传输的数字化、控制结构的层次化设计、可持续发展的巨大潜力等诸多优点。
图1显示的是一个典型的网络控制系统的组成,由控制器节点、传感器节点、执行器
节点和工厂组成,并信息通过网络传输。在NCS中存在三种延迟。在图1中的,,分别代表传感器控制器延迟,控制器延迟,执行器的延迟和计算延迟。在没有普遍性的损失的情况下,计算延迟可以忽略,因为是相比于其他2种延迟该延迟可以忽略。表示传感器和控制器之间的连续的数据包丢失的数量,表示控制器和执行器之间的连续的数据包丢失的数量。
图1.一个典型的网络化控制系统的设置。
随着船舶运动控制的日益复杂化,以及船舶的规模日益增大,网络化控制系统在船舶运动控制中的应用日益重要。它的应用可以有效地降低控制系统的建设成本,提高通信速率,提高通信的稳定性和可靠性,使设备的兼容性大大提高。此外,它可以实现实时网络监测,这最大的增加了海洋导航的安全性。
然而,由于网络控制系统本身的不确定性,会存在许多不足之处。其中最显着的缺点是网络引起的时间延迟。网络引起的时间延迟延是随机的,并且这个延迟可能大于一个采样周期,这会严重影响整个系统的稳定性和性能。此外,由于网络的物理特性的限制,如带宽和服务能力,一些如数据包丢失和数据数据包乱序的问题在数据通信过程中是不可避免的。这些问题导致在网络控制系统中弱化传统的控制策略。因此,有必要对网络控制系统中的控制算法进行研究。
船舶网络化控制系统是一种分布式实时控制系统。通常,在树干继网络结构中进行通信控制。其结构从上到下可概括为:计算机数据处理和显示中心、数据通信网络(包括传感器网络和命令网络)、分布式控制单元、按钮控制网络和执行单元。
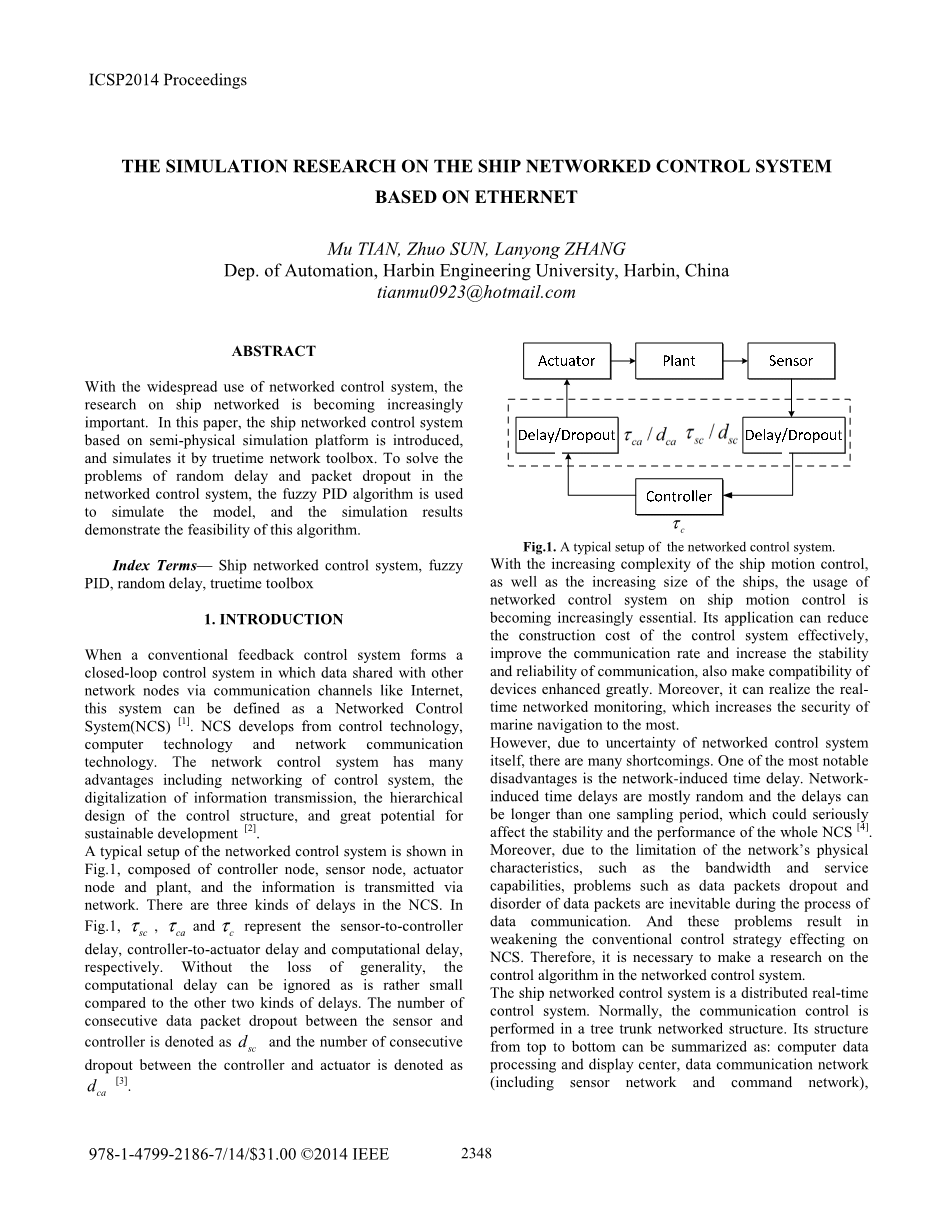
在本文中,半物理模拟平台由双舵系统,双鳍系统和双螺旋桨系统。图2所示该物理设备。
算机数据处理和显示中心包括上位机和人机界面;控制器是基于远程终端单元(RTU)的分布式控制器,采用分布式控制super32系列RTU控制器;执行单元是一个三相交流同步电机和与电机相匹配的电机伺服系统;按钮控制网络是RS-485总线,而顶部的数据通信网络是以太网,它是局域网的计算机网络技术的总和。主舵和舵的舵翼系统是由独立的同步电机控制,在这种情况下,可以获得更好的控制效果,因此作为鳍系统。
图2.半物理模拟平台的物理设备
计算机数据处理和显示中心包括上位机和人机界面;控制器是基于远程终端单元(RTU)的分布式控制器,采用分布式控制super32系列RTU控制器;执行单元是一个三相交流同步电机和与电机相匹配的电机伺服系统;按钮控制网络是RS-485总线,而顶部的数据通信网络是以太网,它是局域网的计算机网络技术的总和。主舵和舵的舵翼系统是由独立的同步电机控制,在这种情况下,可以获得更好的控制效果,因此作为鳍系统。系统架构如图3所示。
由于PID控制算法简单,鲁棒性强,多数项目实现仍采用了PID算法来执行。但对于网络控制系统的结构不确定性和时变干扰,PID控制算法不能实现控制要求。在本文中,在不需要精确建模的情况下,基于原PID控制器的模糊PID控制算法,使得系统性能在时变干扰下更好,更稳定。
图3.船舶网络化控制系统的系统结构。
论文组织如下。第Ⅱ部分提出了一种基于实时网络工具箱对船舶网络化控制系统的Simulink模型简介。第Ⅲ部分介绍了模糊PID的原理和实施。而部分Ⅳ分析仿真结果。最后一节给出了结论和未来的工作方向。
2.基于TrueTime的网络控制模型
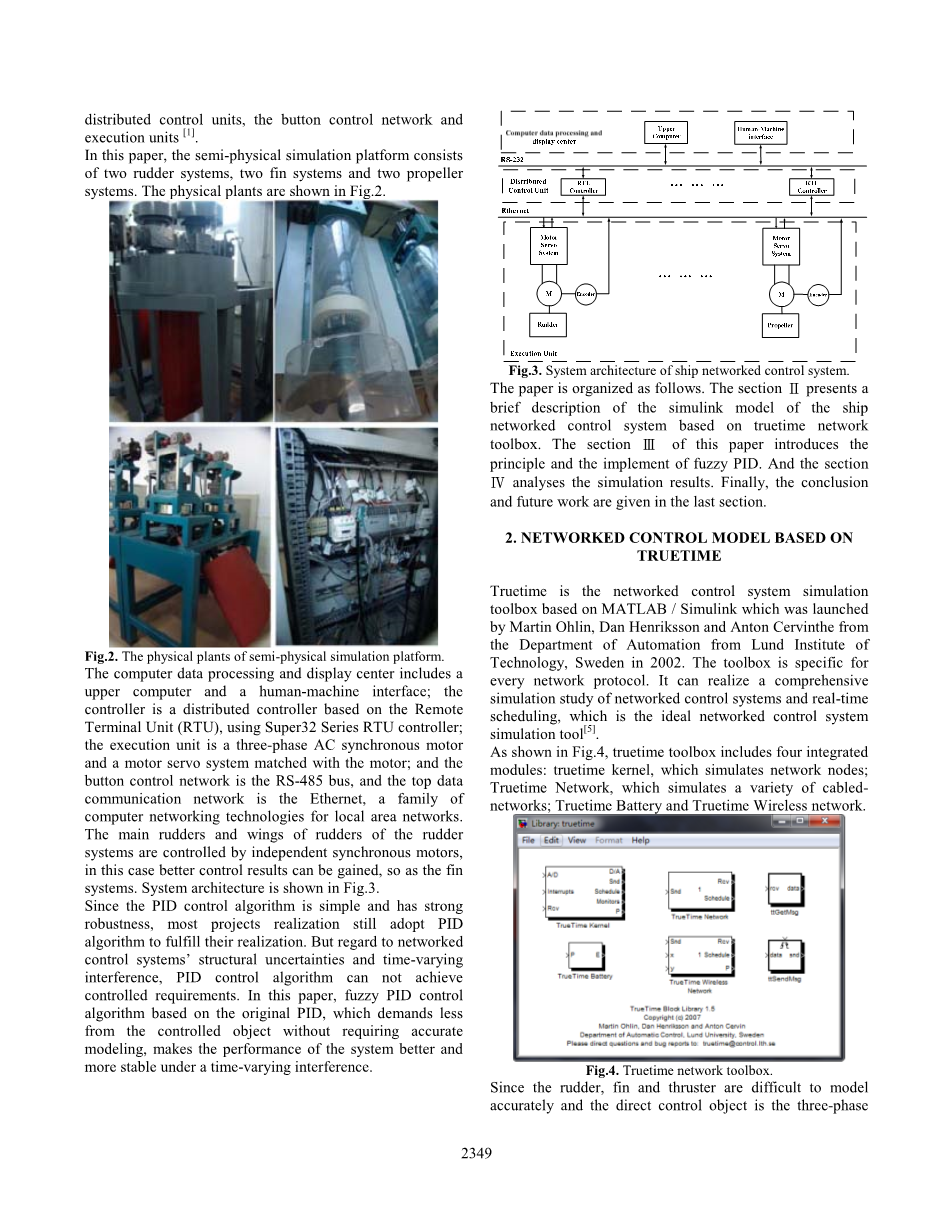
TrueTime是一种基于Matlab/Simulink的仿真的网络控制系统仿真工具箱,Matlab/Simulink在2002年由来自瑞典隆德技术研究所自动化系的Martin Ohlin,Dan Henriksson 和 Anton Cervinthe推出的。该工具箱是针对每个网络协议的,它可以实现网络控制系统的综合仿真研究和实时调度,是理想的网络控制系统仿真工具。
如图4所示,Truetime工具箱包括四个集成模块:模拟网络节点的TrueTime内核;模拟各种电缆网络的TrueTime网络;TrueTime电池和TrueTime无线网络。
由于PID控制算法简单,鲁棒性强,多数项目实现仍采用了PID算法来执行。但对于网络控制系统的结构不确定性和时变干扰,PID控制算法不能实现控制要求。在本文中,在不需要精确建模的情况下,基于原PID控制器的模糊PID控制算法。
图4.TrueTime网络工具箱.
由于舵、鳍和推进器难以精确建模,直接控制对象是三相永磁同步电机,电机和伺服系统都是选择模型。图5在d,q,o的旋转坐标系中演示了永磁同步电动机的数学模型。
图5.永磁同步电机在d,q,o旋转坐标下的模型
d,q,o坐标系与电机的气隙旋转磁场同步旋转。在这个坐标系统定子电压方程为:
其中,感应电机的定子电阻,和分别是直轴和正交轴的电流。是转子永磁体磁极的励磁磁通。和分别是电机直接轴和正交轴的同步电感。omega;是电机角速度。
转矩平衡方程:
其中,omega;/是电机机械角速度,是电机的负载电阻,是电机的转动惯量,是电机的阻尼系数。
针对系统中存在的各种非线性元件,如执行单元的摩擦、传动元件死区和机械传动装置伺服系统的间隙等,这些非线性元件的不确定性给系统的建模和仿真带来很大困难,而其对控制性能的影响不容忽视。因此在分析时,根据系统的特征考虑,这些非线性段,对系统没有影响的可以忽略,而对系统影响较大的部分可以近似处理。而在实际模拟中,系统数学模型的传递函数可以被理想化为。控制信号是由信号发生器产生的方波[ 6 ]。
本研究采用TrueTime网络工具箱对整个网络控制系统进行了仿真试验。模型模拟的系统框图如图6所示。
图6.模拟模型系统图。
图7显示的是网络控制系统的仿真模型,其中的传感器节点,节点控制器,执行器节点以及干扰节点都由可以进行自定义任务的TrueTime的内核实现。一块TrueTime网络块是用来分配根据所选择的网络模型的计算机节点之间的网络消息。网络类型和相关的参数可以通过块掩码对话框设定。
图7.海洋网络控制系统的仿真模型。
该控制器节点的内部结构如图8所示。参考输入信号通过接口A/D传送到控制节点,而传感器的输出信号是通过端口RCB收到。错误、错误的变化和计算的控制信号将被发送到端口D/A进行测试。控制信号也经SND节点到驱动器。
系统中有2种网络随机延迟:一是从控制器到执行器的延迟,另一个是从传感器到控制器。从控制器到执行器的网络传输延迟是由一个可变的传输延迟块,通过该模式的延迟的值可以方便地配置模拟。一个统一的随机数块被用来使延迟随机变化,使真正的网络环境得以实现。
一是从控制器到执行器的延迟,另一个是从传感器到控制器。从控制器到执行器的网络传输延迟是由一个可变的传输延迟块,通过该模式的延迟的值可以方便地配置模拟。一个统一的随机数块被用来使延迟随机变化。
从传感器到控制器的网络传输延时与从控制器到执行器通过连接一个可变的传输延迟块的SND端口是相同方式引起的。
- 模糊控制理论及其实现
PID控制器作为工业中应用最广泛的控制器,结构简单,控制效果好,易于实现。然而,该控制器有它自己的缺点。例如,比例,积分和微分参数的在线调整是不可行的,导致控制效果下降。另一方面,模糊控制器可以利用专家的操作和经验,对这些参数进行在线调整,从而使整个控制器系统在稳定状态下的控制稳定
PID控制器的控制配方如下(3-1):
(3-1)
其中,是比系数,是积分时间常数,是微分时间常数。上述方程可以写为(3-2):
(3-2)
其中,的比例系数,是积分系数,而是微分系数。通过实际运行经验,,,三系数之间存在的非线性关系,并输入控制器的偏差,变化偏差率。虽然这种关系不能在数学中描述清楚,但它可以用模糊的语言来描述。基于三参数的模糊控制器,PID控制器可以得出模糊PID控制原理图,图7。
图9.模糊PID原理
如图9所示,定义了设置输入和系统输出的差值和其变化率作为模糊控制的双输入值,然后用模糊控制器调整控制器的三个参数。图8模糊控制器的实际调整参数,,。经过模糊化、模糊推理和模糊输入和,输入修正值,,,到PID控制器,和正确的三参数实时在线,然后得到控制值。表一是本文所用的模糊规则。七模糊隶属函数来描述,,,,。模糊自整定规则表Ⅰ显示。实验表明,该配置可以实现更好的性能。
4.仿真结果与分析
随机传输延迟引入系统符合均匀分布的规律。当最大延迟时间为1s时数据包丢失的概率是0,PID算法的阶跃响应曲线如图10所示。可以看出,超调量是极大的,具有波动性的,对其影响不大。
图10.阶跃响应曲线
(最大延迟时间:1秒,丢包概率:0)
当最大延迟时间为1s,数据包丢失的概率是0,模糊PID算法下的阶跃响应曲线示于图11
图11.模糊控制算法下的阶跃响应曲线
(最大延迟时间:1秒,丢包率:0)
比较图10和图11,可以发现,当最大延迟时间为1s,超调量和振荡都减少。可以发现,响应时间减少,而控制效果显着增加。当最大延迟时间为1s和数据包丢失的概率是10%,模糊PID算法下的阶跃响应曲线是显示在图12:
图12.模糊控制算法下的阶跃响应曲线
(最大延迟时间:1秒,丢包率:10%)
当最大延迟时间是2s,分组的概率是20%时,阶跃响应曲线示于图13:
图13.模糊控制算法下的阶跃响应曲线
(最大延迟时间:2S,丢包率:20%)
显然,在不同的时间段内,由于延迟时间和丢包率的随机干扰,使其性能有不同的变化。当延迟时间和丢包率变大时,控制性能变差。当图10,11,12和图13进行比较,可以看出,当网络延迟时间变长,数据包丢失的概率越大,响应时间会更长,超调量会更大,这将导致更差的控制性和稳定性。模拟实验还表明,采用模糊控制算法的网络控制系统可以对随机时延和丢包进行自适应。
5.结论与未来工作
在本文中,以太网是用于通信和控制船舶网络控制系统。通过电机和各种非线性元件的建模、系统建模与仿真的MATLAB / SIMULINK / TrueTime工具箱的使用来实现。仿真结果表明,该模糊控制器能较好地响应时间的影响,在时间的影响下,随机时延和丢包率。目前,船舶网络化控制系统已经可以通过以太网进行通信和RTU控制器控制。在未来,提高船舶网络化控制系统的实际性能,有助于此模拟实验的正确性。
6.感谢
如果没有许多人的支持,这个研究项目就不可能完成了。作者愿对所有的人表示感谢。这项工作是由中国国家自然科学基金项目(51279036)。作者非常感谢那些对于显著改善本文的基金提供和审稿。本文是由哈尔滨工程大学的以创新为导向的人才培养的国际交流计划资助。
- 参考文献
[1] S. LIU, B. W. XING, B. LI, “Development Actuality and Key Technology of Networked Control System[C].” Xirsquo;an, Proceeding of the 32th Chinese Control Conference, vol. E, pp. 6692-6697, Jul. 2013.
[2] D. H. SUN. “ Networked Control System[M]. ” Beijing, National Defense Industry Press, 2008.
[3] J. D. SUN, J. P. JIANG. “ Stability of
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148179],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

