英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
在杂乱环境中运行的无人交通工具带有运动预测的目标跟踪
摘要 在一个有障碍物的环境中跟随移动目标的能力对实现自主无人艇来说是基本和必要的。好多目标跟随场景涉及到一个跟随者和可能有不同机动能力的目标船。此外,跟随船可能没有事先了解目标船的预定运动的信息。这篇文章为跟随一个运行在有障碍物的领域中不同驱使的目标船提出了一种轨迹规划和跟踪方法。成熟的方法包括一种新的算法,用于计算所需的在目标船附近的姿态和浪涌速度,共同定义为一个运动目标,并与整个系统的轨迹规划和跟踪方法紧密结合起来。轨迹规划器产生一个动态可行的无碰撞的轨迹以允许无人艇安全到达所计算的运动目标。轨迹规划需要足够快,并且根据移动目标产生动态可行的短的轨迹线。这需要通过搜索轨迹加快规划,通过一种混合的,姿态位置状态空间使用多分辨率控制动作集合。在速度空间中的搜索是从位置空间的轨道搜索中解耦的。因此,潜在的轨迹跟踪控制器计算轨迹每个段的浪涌速度并且确保无人艇维持它。我们已经进行了模拟实验研究,以证明所开发的方法的有效性。
关键词 无人艇 跟随行为 运动预测 轨迹规划 轨迹追踪
1介绍
自主无人艇(USVs)(科菲尔德2006;伯特伦2008;万利2008;格雷厄姆2008)
可以提高其他水面或水下艇的能力,通过在海洋应用中不断跟随他们。这些能力包括在环境监测中的(Naeem 2006,2008;Steimle和Hall2006)海底测绘和海洋取样任务(Aguiar2009;艾克施泰特2007;瑞安2010),由一个异构网络协同监控车辆的手段(例如空气,地面和海洋无人平台)提供态势感知能力(闫2010;Majohr 和Buch 2006;Furfaro 2009),搜索和救援(Murphy 2008;Shafer 2008),或港口巡逻和保护脆弱的地区(基尔戈等2007;Simetti等2009,2010;Scaron;vec和Gupta 2012;Raboin等2013)。
考虑在海军任务中无人艇合作团队保护资产免受恶意船队攻击。在这些任务中,需要无人艇接近经过的船,认识敌人,可能用主动阻断(Scaron;VEC和Gupta 2012)去防止敌人接近物资。为了最大化整个团队的防守表现,每个无人艇在接近或跟随船只的时候考虑自身的动力学是必要的。此外,各艇应该能够可靠地计算其所需位置,方向,和浪涌速度,共同定义为运动目标,通过估计船只以后的状态。
在一个不熟悉,无结构海洋环境(图1)中执行自主跟随任务,这个环境充满可变尺寸,形状的障碍和运动动力学,如其他USV,民用船只,敌人,海岸线,码头提出的许多规划的挑战。无人艇的跟随能力被它自身的机动性约束,目标船的运动特性,对目标船将来运动的了解程度,感测的局限性和复杂的海洋环境所影响。由于目标船运动能力的差异,USV可能不能够以相同轨迹跟踪目标船。相反,它可能需要确定一个不同的轨迹跟随,同时保持接近目标船而且还避免碰撞。此外,USV可能需要在跟踪轨迹时处理急转弯。因此,仅仅利用手动开发和调整的控制规则,在有障碍物的环境中不会导致足够的安全和有效的跟随策略。为应对上述挑战,USV需要有(a)根据目标船当前状态,动态特性,以及在操作环境中的障碍来估计目标船未来运动的能力,(b)以运动目标的形式在靠近目标船时,确定有利和安全的姿态的能力,(c)要快速,要有动态可行的轨迹规划和可靠的轨迹跟踪,以保证接近运动目标时物理感知避障。
图1 一个有各种类型的移动船的典型海湾
我们已经制定了一个规划和跟踪方法,采用了一种新的运动目标计算算法,并将其与整个系统的轨迹规划和跟踪组件紧密结合起来,进行集成规划与控制。基于无人艇和目标船特异的约束条件计算运动目标,预期的目标运动是通过其可能的控制行动的概率分布和环境所施加的空间约束来计算的。特别是提早计划目标船的控制行动,估计其未来位置的概率分布,计算候选的运动目标,选择运动目标以最大限度地减少USV和目标船到达时间的差异,并试图最大限度地减少无人艇的轨迹长度。
所开发的轨迹规划采用基于启发式搜索(皮特等1968)的A*,在一个离散状态动作空间有效地找到一个到运动目标的无碰撞,动态可行的运动轨迹,形成一个格子(pivtoraiko等2009)。轨迹计算通过排序预定义的控制动作产生(即演习或运动基本体),使用USV的动力学模型(Thakur和Gupta 2011;Fossen 2011)。轨迹通过轨迹跟踪控制器有效地遵循航点组成的标称轨迹执行。控制器计算每段轨迹所需的速度,给定每段的最大允许浪涌速度。这使得USV在所需时间内到达运动目标。我们已经进行了实验测试,确定所需的加速和减速距离以匹配所需的速度。
一般来说,我们可以假定USV能够由于它的机械设计和基于位置控制反馈的使用抵制低海态的海洋干扰。然而,这种假设可能不适用于高海态。因此,我们确定障碍物周围的碰撞区域,通过计算不可避免的碰撞区域以及重新规划高频轨迹以应对船只运动的不确定性。此外,我们假设传感器(例如激光雷达,立体摄像机,雷达),数字海图,和Kalman滤波(Thrun 2005)的组合将为我们提供合理的障碍以及USV的状态估计。
因为目标船可能在高速移动,轨迹需要计算足够快,并保持其在USV附近的动态可行性。计算轨迹的质量以及规划的计算性能取决于控制动作的数量和类型,以及不同规划阶段基本状态空间的维数。一个高质量的轨迹可能接近最佳执行时间,但可能需要很长的时间在一个给定的机器上计算。另一方面,一个低质量的轨迹被计算很快,但可能因为不必要的弯路造成更长的时间。这两种情况都会导致糟糕的整体跟随能力。因此,通过叠加高低一维状态空间和使用多分辨率控制动作来牺牲允许水平的最优性是必要的。特别是,状态空间的维数和控制动作的数量随着无人艇到目标船距离的增加而减少。我们已经进行了详细的实证分析,以找到一个快速计算和轨迹长度之间的权衡。
本文建立在我们以前的工作上(Scaron;vec等2012),在这里我们介绍了一个基于格的规划,来计算USV接近一个动态运动目标的动态可行无碰撞的轨迹。我们呈现以下新结果:
- 我们已经提出了一种新的预测运动目标的算法,有能力以更高的精度估计目标船未来的状态。这是可能的,通过利用已知目标船动态以及它的行动选择模型,模型定义了目标控制行为的概率分布。
- 我们已经对变化的状态空间维数与关于规划和轨迹长度的计算效率控制行为分辨率的影响进行了详细的实证分析。
- 我们已经改进了轨迹跟踪技术,计算轨迹每段所需的速度,给定的到达运动目标所需的时间,以及其各个环节的速度上限。
- 我们已经进行了物理实验,使用无线电控制船只,以评估在一个真实的情景中的规划。
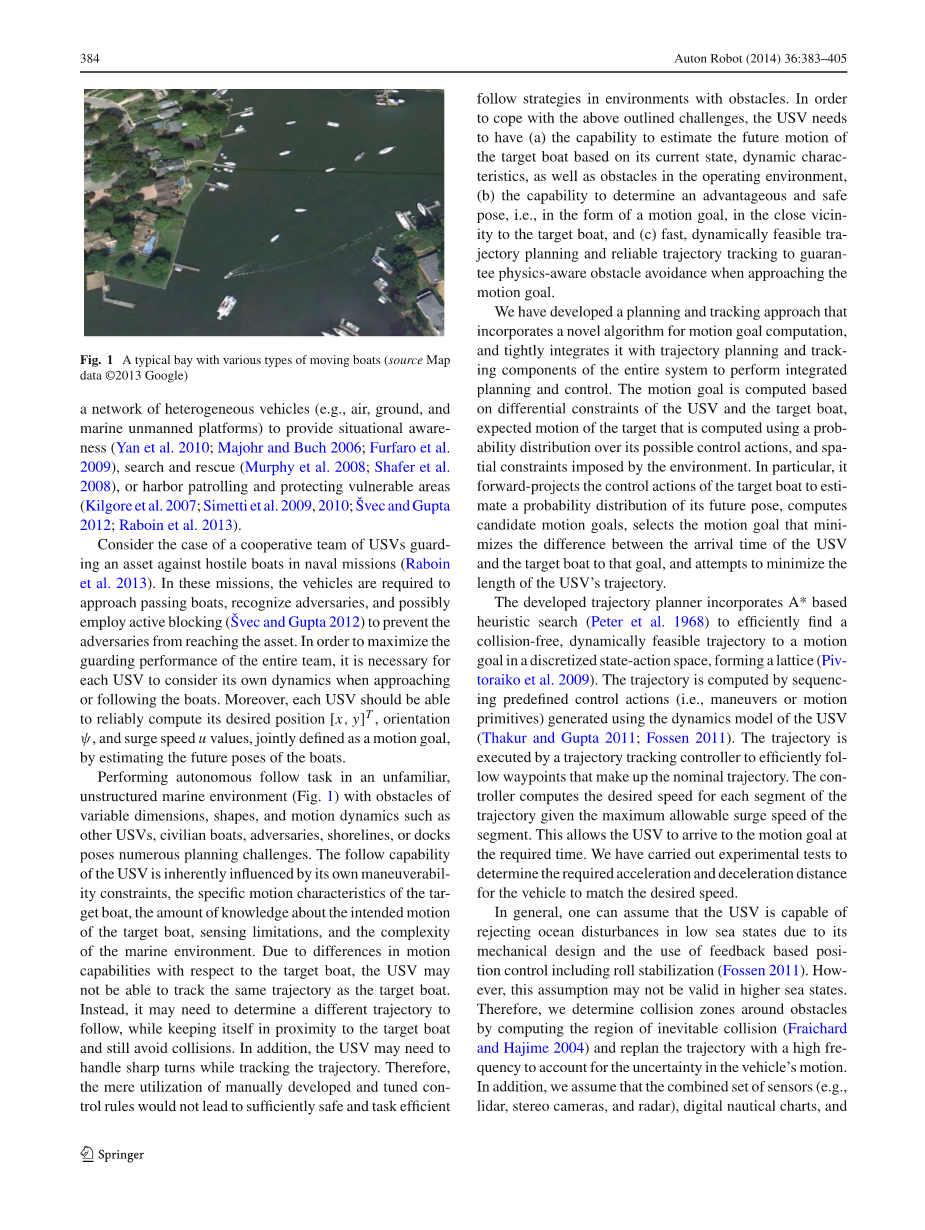
论文的要点如下。首先,我们在第二部分回顾现有的主要规划和控制方法。其次,我们在第三部分提出问题的定义,接下来第四部分是整体方法的概述。概述包含了对无人艇集成了所有规划模块的系统架构的描述(图2)。接下来,我们描述状态动作空间表示,用于第六部分的运动目标预测以及7.1部分的标称轨迹规划。随后7.2描述了发展轨迹跟踪技术。最后,第8部分我们提出了模拟仿真和实验结果。
图2 在有障碍物的海洋环境中跟随移动目标的无人艇系统架构
2文献回顾
我们将回顾与在一个有障碍物的环境中跟随移动目标船有关的代表作品。我们特别关注的是跟随移动目标的技术。对追击和躲避问题感兴趣的读者可以参考Chung中的综合调查。回顾包括目标跟随技术,USV域的控制和制导系统,以及对有特定约束的船只的轨迹规划技术。
2.1目标跟随
关于国家最先进的目标跟踪方法的调查可以在Bibuli中找到。包括多船只运动控制。此外,本文提出了USV通过观察其路径和使用路径跟踪算法精确执行来跟随引导船的实验验证。实验在艾拉妮丝和查利平台上演示。
高速直线跟踪能力由布雷维克等人提出允许欠驱动无人艇跟踪移动目标。基于以前用于拦截导弹的制导系统,该运动控制系统由恒定方位引导和速度控制模式组成,允许高且精确的可操作性。
各种用于搜索和跟踪目标,对接,无碰撞,调头,过程跟踪和航点跟踪的先进演习在MESSIN系统中应用。系统能够通过各种应急方案处理组件的故障。此外,综合路径规划利用航点和运动基元表示为圆弧。
协同控制是基本跟随行为的延伸,多个无人船可以跟踪其相应的路径,同时在编队中保持自己且保持所需的速度跟踪目标。在这项工作中,路径和目标跟随在Aguas Vivas和DELFIMX USV物理平台上评估。此外,使用NetMarSyS模拟器产生的仿真结果表明了三个无人艇在有海流的海洋环境中如何跟随它们的路径。
提出解决方案的目的是在后续任务中,处理水面和水下船只之间的通信不确定性。另一个在实际平台的多船只跟踪实验包括主船由两个无人艇跟随。
为了处理由于海洋干扰引起的运动不确定性,动态表面控制和作为神经网络的自适应编队控制器由Peng等人提出。类似地,在考虑船只的不确定动力时,跟随主船的编队控制由布雷维克等人发现。
2.2控制和导航系统
在控制,路径和轨迹跟踪,避障方面,本文提到了更多与USV跟随能力相关的文献。
对无人艇利用3个自由度简化动力学模型的欠驱动控制器设计(即忽略滚动,倾斜,和升沉运动)进行了广泛的探讨,例如(Katebi等1997;罗丽亚等2000;Mazenc等2002;Do等2002;Lefeber等2003;Ashrafiuon等2010)。
PID控制与扩展的卡尔曼滤波法在Caccia中被使用去执行基本控制任务,如直线跟随,自动前进和速度保持与适应。在自主无人艇原型上评价控制系统。麻省理工大学的球探Kayak平台还实施了类似的PID系统,集成了一个传感器自适应控制的分布式自治结构。该架构包括基于行为的多目标函数控制模型,允许基于区间规划的行为协调。这个开发行为包括航点,stationKeep,恒速和定时器。
跟随路径或轨迹的问题与在一个障碍物的环境中目标跟踪问题紧密相关,因为是重要组成部分。路径和轨迹跟踪技术大多从地面和空中域发展而来。路径跟随技术的目标是尽量减少距离和车辆与路径间的切向误差。一般情况下,系统的使用者为所要执行的车辆指定一个特定的速度(帕萨科尔等2006)。在轨迹跟踪中,每个航点还指定船只到达时间。
对欠驱动USV路径跟随算法的总结可以在Bibuli(2009)中被找到。论文还介绍了一种非线性的基于普诺夫的控制规律,可以最大限度地减少路径跟踪错误。考虑路径曲率以及转向预测的速度自适应通过启发式技术实现。所开发的系统用于查利USV,使用测量路径跟踪精度以及实际和名义路径间的总面积来评价。
Springer USV的导航、制导与控制系统由Naeem等人设计。特别应用包括环境监测广泛领域的污染物跟踪。视线和航点导航被用于指导和化学源检测追踪技术。ISR / IST DELFIM USV也类似,导航、制导与控制系统也有能力自主跟随和轨迹跟踪,并且操纵。该平台用于自动海洋数据获取。
目前无人艇采用全局和局部避障在用户指定的航点之间移动。无人艇的避障技术大多被用来引导,与国际法规相符合防止海洋冲突(COLREGs)(Benjamin等2006;拉尔森等2006;Naeem等2011;Kuwata2011;Scaron;vec等2013)。带有反应式避障的航点导航(即使用遵循胡萝卜技术)在SPAWAR系统中心的制导系统(Ebken 2005)中提到。该系统还包括一种基于全局规划的A*启发式算法(拉尔森2006 ;Ebken 2005)。动态避障采用速度障碍法(Fiorini1998)和临界点计算,在前向投影区域移动的障碍可以沿它们的未来路径。另一个基于全球规划的有三层体系结构A*由Casalino等人提出(2009)。
在一个更高的水平,目前最先进的机器人代理指挥控制结构和传感(加拉加斯)系统已经被the Jet Propulsion实验室(JPL)(Huntsberger等2007,2008)提出。系统组成包括认知、行为和动态规划(CASPER)。这个计划由全局和局部避障组成。加拉加斯在多样水环境下测试,因为这是模拟的最全面的系统。
目前只有少数开发的系统可以计算动态可行的轨迹,例如(Greytak和Hover2009),由我们的轨迹规划在构成的空间(Bertaska等2013;Scaron;vec等2013)产生。在实际系统中避障技术的实施和评估仍然是非常不成熟的,特别是考虑动态避障的时候。它们高度依赖于海洋运营商以防碰撞威胁(Corfield等2006)。
2.3轨迹规划算法
轨迹规划在机器人学(LaValle 2006)里是一个广泛而重要的研究领域。在这里,我们总结一些重点研究特定约束下的规划的有代表性的研究论文,因为它与我们的规划方法密切相关。规划算法的特殊群体可分为以下几类(Goerzen 2010):(1)基于状态空间抽样的轨迹规划(2)在空间和时间解耦的轨迹规划(3)机动机器人(MA)(4)数学规划(5)模型预测控制(MPC)。
状态空间采样技术通常代表船的状态空间。离散状态空间搜索无碰撞轨迹,优化指定成本。反馈政策(即导航功能)在离散状态空间通过一个值或策略迭代动态规划算法(DP)(LaValle 2006)被计算。另一种常见的选择是快速探索随机树(RRT)技术及其扩展(Frazzoli 2001;LaValle等2001;Hsu等2002),重点是高维配置空间的随机抽样。为了使规划在一个连续的空间可行,插值经常被使用,正如Lavalle等(2001)。
解耦轨迹规划将搜索划分为全局搜索(铃木2005;本内维茨等2002)和局部搜索。基于全局搜索的A*的只考虑船只的运动特性,而局部搜索解决两点边界值问题(LaValle2006)来产生一个符合特定约束的轨迹。例如,航点的计算和RTABU搜索优化技术相结合,来生成无碰撞轨迹。另一种方法将基于势场的拉普拉斯技术和速度控制解耦,就像Scherer等提出的(200
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147734],资料为PDF文档或Word文档,PDF文档可免费转换为Word

