英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
机场物流系统中的堆垛机控制的仿真研究
孟建军 杨承辉
机械电子技术研究所(机电技术研究所) 兰州交通大学 兰州 甘肃省
mengjj @ mail.lzjtu.cn
摘要
针对机场物流存储系统中的单速度堆垛机,本文主要以堆垛机为研究对象,提出了基于 MATLAB 软件环境的多速运动模式的堆垛机仿真模型。这种仿真模型的参数是与实际堆垛机结构紧密相连的。结合了状态参数分析与实验数据处理的方法被使用在模型设计之中,并根据指定的参数在SIMULINK中进行模型仿真。仿真结果表明,该模型具有合理性和有效性,并能明显提高堆垛机运动的效率。结果表明堆垛机的多速控制模式在机场物流存储系统中的应用有很大的合理性和可行性。
关键词:机场物流;堆垛机;多速度模型;仿真
Ⅰ简介
随着时代的发展和自动化存储/检索系统的广泛应用,堆垛机可以访问产品;它的实时控制被应用于仓储系统的计算机控制和管理中。在国内外,堆垛机常是三维存储/检索系统中的处理设备。如今一些研究主要讨论堆垛机控制系统设计和巷道堆垛式运行机器的设计,为了提高堆垛机效率,这篇文章以多速度模型研究机场仓储系统中单速度操作和低效率传统堆垛机模型。建模仿真技术可以分析和调整设计方案,使参数合理化。本文基于应用的例子建立了多速度堆垛机的仿真模型,并分析了仿真结果。
Ⅱ 机场物流仓储系统
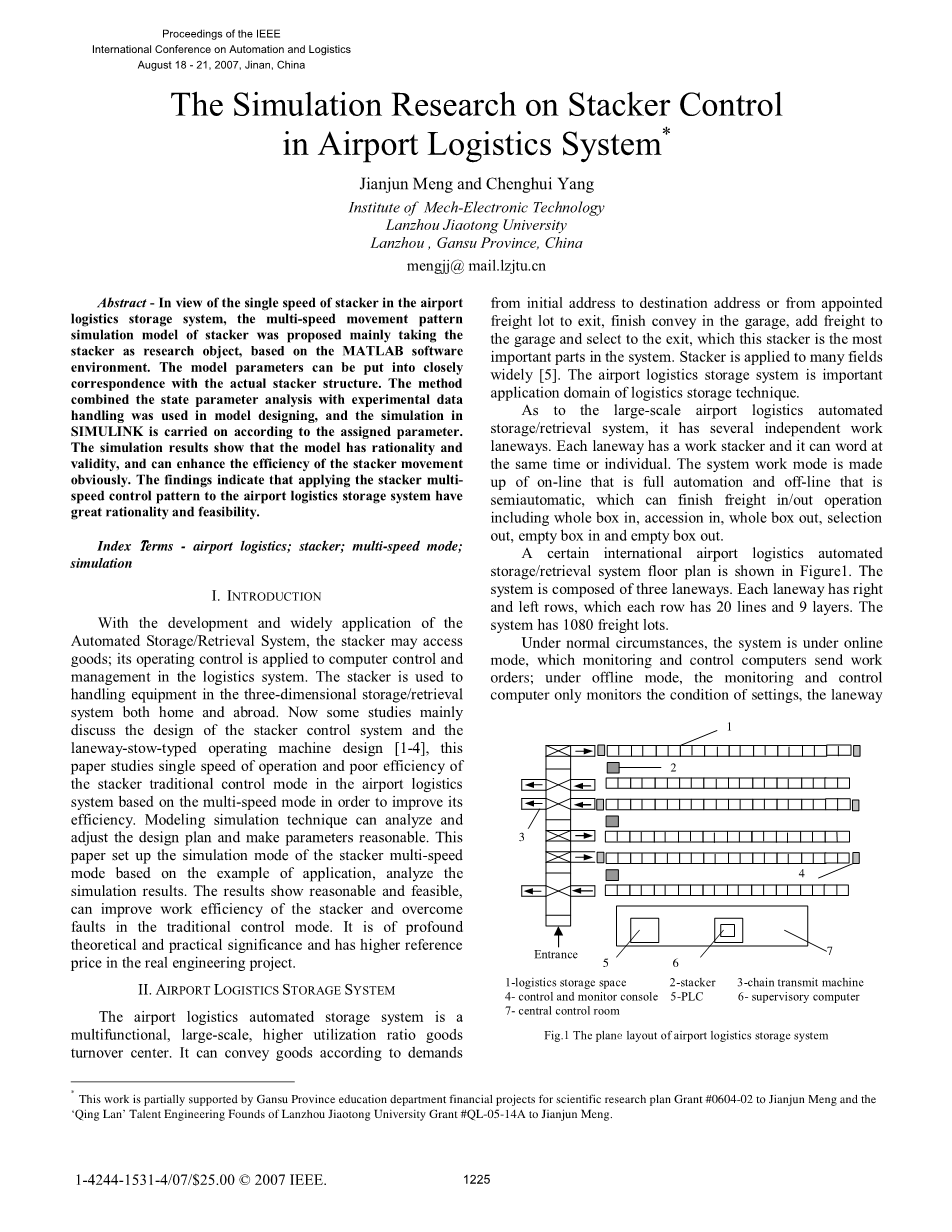
机场物流自动化存储系统是一种多功能、规模化、利用率更高的商品周转中心。它能根据初始地址要求传递货物到目的地址或者根据指定的货位运送到出口位置;在车库完成运送,添加货位到车库并选择出口位置,其中堆垛机是系统最重要的部分。堆垛机是广泛应用于许多领域。机场物流仓储系统是物流仓储技术的重要应用领域。至于大型的机场物流自动化存储检索系统,它有几个独立工作巷道。每一个巷道有一个工作堆垛机,它们可以同时工作或者单独运行。该系统的工作模式是由完全自动化的在线模式和半自动的离线模式组成,它可以完成货位的出入操作,包括整个货箱进入、新增货物的进入、整个货箱搬出、已选择货物搬出、空箱子的进入和空箱子的搬出。
某国际机场物流自动化立体仓库平面图如图1所示。
图1 机场物流存储系统平面图
该系统由三个巷道组成。每个巷道有左右行向,每个行向上都有20行和9层。系统总共有1080个货运位。在正常情况下,该系统处于在线模式之下,此时监测控制的计算机发送工作订单;在离线模式之下,监测控制计算机显示设置条件,巷道控制台发送工作指令。在机场物流自动化存储系统中堆垛机的控制模式具有手动模式,半自动模式和全自动模式。在全自动化控制中,工作任务是监视控制的计算机发送并由堆垛机接收,然后堆垛机执行订单。在半自动模式下,运营商在触摸屏控制台中直接设置工作订单和地址。在实际运行中,半自动模式和全自动模式是主要的运行方式,手动模式用于维护和调试。
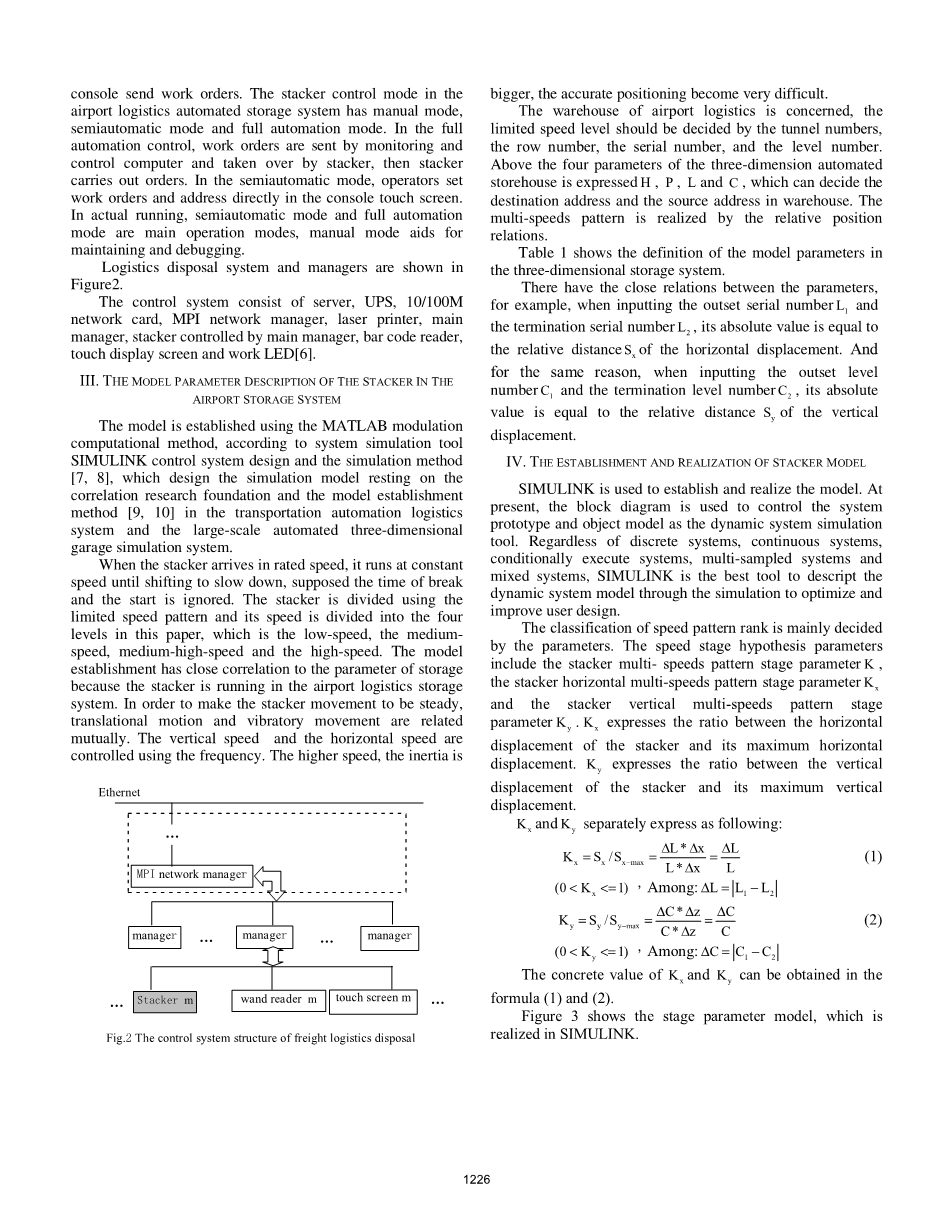
物流处理系统和管理层结构如图2所示。
图2 货运物流处理的控制系统结构
该控制系统由服务器、UPS、10/100网卡,MPI网络管理器,激光打印机,主要管理器、由主要管理器控制的堆垛机,条形码读取器,触摸显示屏和工程LED组成 。
Ⅲ 堆垛机在机场存储系统的模型参数描述
该模型建立是通过使用MATLAB调制的计算方法,根据系统仿真工具SIMULINK控制系统的设计和模拟方法,它设计的仿真模型是基于相关研究基础和模型的建立方法,而这些方法多用于交通自动化物流系统和大型自动化立体车库仿真系统。假定休息和开始时间被忽略,当堆垛机到达额定速度后,它会恒速运行直到转换至减速的瞬间。堆垛机使用限速模式,本文中其速度模式被划分分为四个层次,即低速、中速、中高速和高速。因为堆垛机运行在机场物流仓储系统中,所以模型的建立与存储的参数有密切关系。为了使堆垛机运行更稳定,平移运动和振荡运动应是相互关联的。纵向速度、横向速度通过使用频率进行控制。速度越高,惯量越大,精确的定位将变得非常困难。
机场物流的库房是有关的,其限速等级应该由巷道数目、列数、串行数和水平序列数决定。以上三维自动化仓库的四个参数被表示为H、P、L和C,它们可以确定目标地址和仓库中的源地址。多种速度的模式是通过相对位置关系来实现。
表1显示了在三维存储系统的模型参数的定义。
表Ⅰ 三维存储系统的模型参数
|
参数 |
参数释义 |
|
Ⅰ |
限制速度等级-低速 |
|
Ⅱ |
限制速度等级-中速 |
|
Ⅲ |
限制速度等级-中高速 |
|
Ⅳ |
限制速度等级-高速 |
|
H |
巷道数:1、2、3 |
|
P |
巷道的导轨数:1、2 |
|
L |
仓库的列的编号:1-20 |
|
仓库的编号源地址:1-20 |
|
|
仓库的目的地址编号:1-20 |
|
|
堆垛机的目标地址和源地址之间的相对列 |
|
|
C |
仓库的层数 |
|
仓库中的源地址的层数 |
|
|
仓库中的目的地址的层数 |
|
|
堆垛机的源地址和目标地址之间的相对层 |
|
|
每个货位的长度 |
|
|
每个货位的宽度 |
|
|
每个货位的高度 |
|
|
堆垛机水平位移 |
|
|
堆垛机最大水平位移 |
|
|
堆垛机水平多速度等级参数 |
|
|
堆垛机垂直位移 |
|
|
堆垛机最大垂直位移 |
|
|
堆垛机垂直多速度等级参数 |
参数之间有着紧密的关联,例如:当输入开始序列号和终止序列号时,其绝对值等于水平位移的相对距离;出于相同的原因,当输入开始等级号和终止等级号时,其绝对值等于竖向位移的相对距离。
Ⅳ 堆垛机模型的建立与实现
SIMULINK工具被用于建立和实现模型。目前,方框图作为动态仿真工具被用来控制系统原型和对象模型。无论离散系统,连续系统,条件性执行系统,多取样系统和混合系统,SIMULINK是最好的工具来描述动态系统模型,通过模拟优化并提高了用户的设计。
速度模式等级的分类主要是由参数决定。速度等级假定参数包括堆垛机多速度等级参数K,堆垛机水平多速度等级参数和堆垛机垂直多速度等级参数。表示堆垛机水平位移与堆垛机最大水平位移之间的比例关系。表示堆垛机垂直位移与堆垛机最大垂直位移之间的比例关系。
和分别表示如下:
,
(0le;1),其中: ;
;
(0le;1),其中: ;
和的值可以通过公式(1)和(2)获得。
图3显示了通过SIMULINK实现的阶段参数模型。
图3 等级参数模型
以堆垛机水平的多速率模式阶段参数K为例,其计算的实现过程和步骤如下:
步骤1:在指令窗口中输入源地址序列号,目标地址的序列号,和巷道垂直序列号L。然后,y_lh表示的值,m_lh表示的值,lh_max表示L的值;
步骤2:单击操作程序,运行SIMULINK模块的参数模型, 、和L的值分别显示在显示窗口0,显示窗口1和显示窗口2中。
步骤3:的值是通过等级参数模型中的运算程序获得的,并被显示在S_xd中。
步骤4:判断相应的多速度模式中的速度模式等级。
速度模式的阶段情况如下:
0le;1/4对应着限制速度模式等级1,那是低速;
1/4le;1/2对应着限制速度模式等级2,那是中速;
1/2le;3/4对应着限制速度模式等级3,那是中高速;
3/4le;1对应着限制速度模式等级4,那是高速;
步骤5:根据限制速度模式等级选择最大运行速率 和最远距离;
步骤6:根据速度运行模式设置实现堆垛机整个运行过程的参数。
Ⅴ 堆垛机模型实例分析
在堆垛机调速过程中,堆垛机的阶段变化与堆垛机的速度模式、源地址和目标地址息息相关。根据目标的相对距离,假设有四个速度级别,等级Ⅰ-等级Ⅳ分别表示每个速度级别的各种速度,并给出了堆垛机可能的运行范围。堆垛机从源地址到目的地的地址的相对位置选择是根据具体的速度水平来定的。最大位移和最大速度之间的关系由下式给出:
(3)
是水平移动中的相对位移,是速度模式等级中的最大相对水平位移,它的单位是m。是水平运动中速度值的实时变化量,是水平速度模式中的最大速度值,它的单位是m/s。t是堆垛机水平运动的时间。
推导单位可知是这个模型中负值参数,单位是,其大小根据不同的速度模式等级而变化。不同的水平速度模型参数如表2所示。
使用合理的限制速度模式水平并根据货物的向上运动过程中的稳定性判断,垂直速度大约是堆垛机的水平速度的1/3。计算机控制系统的堆垛机运动平面示意图如图4所示。
图4 堆垛机运动平面示意图
每一个速度模式的速度变化都是加速与减速的过程。已发现速度尖峰对于堆垛机控制是非常重要的。堆垛机水平速度和垂直速度依次通过速度反馈电位器1和2进行控制,通过采用反馈控制理论,这样可以实现堆垛机速度的实时调节控制。相应的速度仿真曲线如图5、图6所示。
图5 堆垛机水平运动的速度曲线
图6 堆垛机垂直运动的速度曲线
图5和图6分别显示出了堆垛机水平运动与垂直运动中速度与位移之间的关系。等级Ⅰ-等级Ⅳ分别代表了低速运行等级、中速运行等级、中高速运行等级和高速运行等级。第二个方向的图中的四种抛物线曲线表达了不同速度模式下堆垛机可能的效能图示。
表2 水平速度的模型参数
|
参数 |
Ⅰ |
Ⅱ |
Ⅲ |
Ⅳ |
|
剩余内容已隐藏,支付完成后下载完整资料 资料编号:[147675],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

