
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
PID控制技术到自抗扰动控制技术
摘要:总结自抗干扰控制如下:它传承了PID控制的效果,这种效果使之大获成功,这种效果是误差驱动而不是基于模型控制规律;自抗扰控制从PID控制吸取了他的最好的特点:状态观测器;自抗扰动控制包含了非线性反馈的能力,并将它充分利用;自抗扰动控制是一个有用的数字控制技术由一个源于计算机仿真的实验平台发展而来。只有当控制被当作实践科学而不是数学科学的时候,自抗干扰控制系统才有可能实现。自抗扰动控制系统是由日益增长的工业需求推动的,工业要求控制技术超越已经统治这个行业八十年的PID控制技术。特别地,在我们非常看重的PID控制系统里,有四个方面的不足:(1)误差计算;(2)微分控制中的降噪处理;(3)在以线性加权和形式的控制规律中,性能的过度简化及损失;(4)而且会有积分控制带来的并发症。相应地,我们提出四个不同的措施:1)将一个简单的微分方程作为瞬态轨迹发生器;2)一个抗噪声跟踪微分器;3)非线性控制规律;和4)总扰动评估和排斥的概念和方法。总的来说,他们形成一套新的工具和一中新的控制设计方法。在实验室和工厂平台上,在表现和时间上,ADRC(自抗扰动控制系统)一次又一次被证明能够以无误差的优势取代PID控制。为今天工程上的问题提供解决办法。ADRC代表着新的面貌和可能性,我们进一步相信控制工程可以突破传统PID控制的限制,步入一个新的带回创新精神的时代。
索引词—自抗干扰控制(ADRC),扩展状态观测器(ESO),非线性PID控制器(PID),跟踪微分器。
1.简 介
为了应对第二次世界大战之前、期间和之后的工业自动化迫切的要求,强大但是简单的PID控制规律的诞生和大规模使用可以追溯到二十世纪二十年代至四十年代。在战后制造业,他的爆炸性增长作业是毋庸置疑的;它的优越性即使在今天整个工业的各个环节也是非常明显的。同样不可否认的是在现代工业时代,对效率无止境的追求和有技术劳动的缺失使反馈控制技术需要高昂的花费,PID越来越难以达到新的要求。在模拟电子时代,它的简单性的优点已经转变成电子控制时代的稳定性,因为它已经不能充分利用新紧凑型的和强力的电子处理器。显而易见地,如果PID从没有失败过,它将最终失去它作为一项技术的功效。问题是,在21世纪,什么将取代这个无比成功的控制机械,保留它基本的稳健性并且,与此同时改善局限性?令人怀疑的,在过去,这个问题甚至被系统地娱乐化,更不用说被回答了。
我们相信,答案在于我们队PID的特点以及它面对的挑战的理解。正是这种理解将使我们推动PID框架进一步的发展,或者甚至是对新一代电子控制解决办法的一个激进创新。在这片论文里,我们认为在现存的PID控制框架里,有四个基本技术的限制,我们准备提出如下相应的技术和原则上的解决办法;1)将一个简单的微分方程作为瞬态轨迹发生器;2)一个抗噪声跟踪微分器;3)非线性控制规律;和4)总扰动评估和排斥。总的来说,结合这些新工具可以形成一个新的数字控制规律的综合的骨干,数字控制规律不依赖于一个准确而且活跃的事业模型,而且对不确定性相当宽容及简单易用。而且,我们将这种新的综合表示为自抗干扰控制器或者ADRC。
随着ADRC的思想和应用出现在英语文学以及这些年偶尔出现在一些问题和困惑中,它已经成为一项持续了二十年的工作【1】—【7】;比如说【8】—【14】。在ADRC中,我们看到了在2001年首次用英语系统的介绍中的反馈控制的例证变化【8】。自抗干扰的概念在【9】中得到进一步的阐述。然而,即使ADRC的在实践中的应用已经取得很大成功,很显然,这个新的范例还没有被很好地理解,需要有一篇论文为英语读者全方面地介绍ADRC。这种需求在最近更提出的术语中是毋庸置疑的,比如相等的输入干扰【14】、扰动输入干扰【15】,所有这些能被看做是ADRC的一个特别案例,在这个案例中,只有外部干扰被考虑在内。最初写这篇论文就是这个原因。
在这篇论文的第二个环节中,我们以在如今工业中占统治科技地位的经典PID开始,讨论它的特点和缺点,接着是第三环节提出的补救措施和第四阶段最终的ADRC控制方案。第五部分展示了这个新的框架是如何备用来解决各种控制问题的。为了更好的帮助使用者操纵这项方法,第六部分展示了一些ADRC应用的关键点,接着是第七部分的结论性的观点。
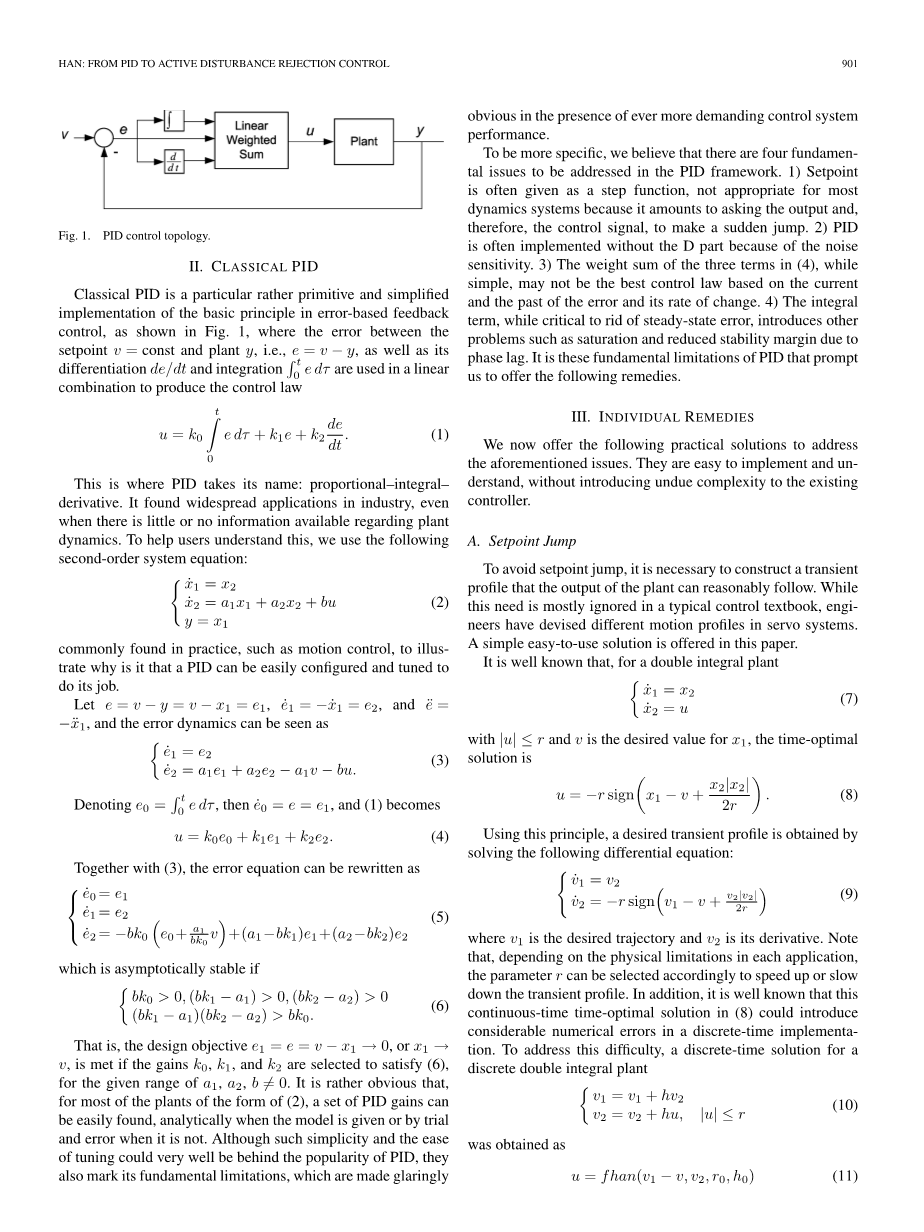
在以误差为基础的反馈控制中,经典PID是一个特定的而原始的和简化的基本原理的实现,如图一所示,在设定值v和输出值y之间的误差e = vminus;y,而且它的微分de/dt和积分环节 用于线性组合并产生控制规律
这就是PID闻名的位置:PID。它广泛用于工业中,即使有少量甚至没有关于输出动态的信号可观测到。为了帮助用户理解这个,我们使用下面的二阶系统方程:
在实践中广泛地被发现,比如运动控制,阐述为什么一个PID能容易成形并发挥它的作用。
使e = vminus;y = vminus;x1 = e1, ˙ e1 =minus;˙ x1 = e2, 并且 uml; e = minus;uml; x1,然后动态误差就能被看做
表示
然后
- 式变成(4)
和(3)式合并,误差等式可以被重新写成:
如果下式成立则系统临界稳定
然后,如果增益K0、K1、K2满足式(6),设计目标e1 = e = vminus;x1 →0,或者x1 →v达到要求,对于给定的a1,a2,b不等于0的范围。相当明确的是,对于大多数式(2)的形式的输出,解析当给了模型或者未给模型通过不断实验和错误,一系列PID增益可以被简单发现。虽然这种简易性和易于调整性是追随PID所带来的,他们也标明了它的的基本限制。在越来越多地要求系统控制的性能的环境下,这些限制是尤为重要的。
更为明显的是,我们认为在PID的框架中有四个基本问题需要解决。1)设定点通常是给定阶跃函数,不适合大多数动力系统,因为它要求输出和控制信号突然的跳跃。2)因为噪声干扰的敏感性,PID经常在没有微分环节下实施。3)式4)中的三项的加权和尽管简单,但可能不是最好基于当前和过去错误和变化率的控制法则。4)积分项虽然对稳态误差非常重要,但积分项由于相位差的原因引入了其它的问题,比如饱和和稳定性的降低。正是由于这些基础的PID限制促使我们提供一下的改善方法。
III个别项的解救方法
我们现在提供以下实践解决方法去解决上诉的问题。他们容易实施并且易于理解,不用在现有控制器上引入不必要的复杂性。
- 选定点阶跃
为避免选定点的跳跃,有必要建构一个系统输出可以合理跟进的瞬态概要文件。由于在大多数典型控制课本里面,这种需求被忽略,在伺服系统中,工程师们已经设计不同的运动配置文件,这篇论文已经提供了一个简单的易于使用的解决方法。
众所周知,对于一个二重积分对象:
当|u|le;=r并且v是x1的希望值,时间最优的解决方案是:
使用这个原则,通过解决以下微分方程,可以得到一个期望的瞬态配置文件
在以上方程中,v1是所需的轨迹,v2是它的导数。注意,根据每个应用程序的物理限制,参数r能通过加速或者减速瞬态概要文件进行选择。另外众所周知,在(8)式中,这种连续时间的时间最优解决方案会引入大量数值离散时间实现中的错误,为了解决这个难题,针对离散二重积分的一个离散时间解决办法
由u = fhan(v1 minus;v,v2,r0,h0)而来。在这里,h是采样时期,r0 and h0是控制器参数值,fhan(v1,v2,r0,h0)是:
注意(11)式是保证最快从v1到v转化,没有任何过度,而且r0 h0被设定分别等于r和h的一个时间最优解决办法。然而当(10)和(11)式被用于定义一个瞬时配置文件,r0和h0能通过希望的速度和顺滑度被独立调整。
- 追踪微分器
在PID控制器中,很常见的是一个信号v的微分器得为:
能被写成:
或者在实践域中写为:
这种近似对于v中的噪声是相当敏感的,因为它的放大倍数是1/tau;。也就是,如果v(t)包含噪声n(t),然后˙v(t)包含 在(13)式的第一个方面中。因此我们得出结论(12)式不是一个好的接近˙ v(t)的方法。相反地,我们提出下面的近似:
能被完善来用于第二级别的转换功能:
而且,作为模拟验证,这个解决了上述问题中的噪声放大问题。一个特殊的第二次微分器的近似是s/(tau;s 1) 2,这个对应于带有r =1/tau;的微分方程:
在此式中,追踪y(t) 追踪v(t), ˙ y(t) 跟随˙ v(t),而且r决定了速度。正是找到一个微分器的渴望产生最快的跟踪,是我们得到的“跟踪微分器”如下所示。
假设v(t)为输入信号需要要加以区别;(9)式在这再写一遍:
提供最快的跟踪v(t)和它的导数极限加速度r。正是这种意义,(17)式被表示为v(t)跟踪微分器。然而,在实际应用中,我们再一次建议在(10)和(11)式中它的离散形式被用于避免不必要的震荡,在震荡中r0和H0也相应调整为滤波器系数。
- 非线性反馈的组合
PID,作为一个控制规律,采用当前的,积累的,预测的跟踪误差形式,已经很长一段时间忽视了其它更为重要有效组合形式的可能性。作为一种选择,我们提出以下非线性功能:
有时在实践在出乎意料地提供更好的结果。比如说在有线性反馈的情况下,跟踪错误最好在无限时间里接近于0;带有 这种形式的非线性反馈。
在alpha;lt;1的情况下,误差可以更快的在有限时间达到0,这种alpha;也能够在减小稳态误差方面起显著的作用,到了这种程度:一个积分控制连同它的失败都能够被避免。一个极端的案例是alpha;=0,比如:能零稳态误差并且没有PID中的积分项的开关控制。正是由于如此效果和独具一格的非线性反馈的特征,以至于我们提出一个系统的和实验的调查。这种fal和fhan形式的非线性反馈功能在新提出的控制框架中(比如ADRC)发挥了重要作用,这个将在这篇论文的后面呈现。
- 通过ESO的总干扰评估和抵抗。
在这个还价,我们介绍一个新的原则:总干扰和他的评估与抵斥。一般来说,虽然这种原则可以被运用于大多数的非线性多重输入和输出(MIMO)时变系统,为了简单和清楚,我们使用一个二阶单输入单输出的例子。
假设:
Y作为输出,会被测量并被控制,u是输入,而且f(x1,x2,w(t),t)是一个多变量的有状态和外部干扰和时间的功能。
这里的目标是使y如期望使用u作为操作变量表现,为了这个目标,不想任何一个(19)式中的数学分析,f(x1,x2,w(t),t)不需要表现为已知。实际上,在反馈控制的情况下,F(t)=f(x1(t),x2(t),w(t),t)是被控制信号克服的某种事物,因此被表示为总干扰。此时,我们已经转化一个传统上属于系统辨识至抵抗干扰的问题,并且结果是巨大的。
将F(t)作为一个另外的状态变量,x3 = F(t),并且使˙ F(t)=G(t), G(t)未知,(19)中的院士现在可以描述为
这总是可被观测的。现在,我们构造一个状态观测器,表示为扩展的状态感测器(ESO),形式如下:
在一个h下的采样周期,以离散形式被实施:
对于一个特殊的问题,有大量方式去选择观测器的增益beta;01, beta;02, 和beta;03。比如,(22)式的观测器增益能被选择为:
对于F(t)=gamma;sign(sin((0.001/h)t))。仿真结果显示,观测器对于h从0.0001至1000广泛范围下表现的非常好。
对于(21)和(22)连续和离散时间形式下的ESO,为了实施过程的简单起见,观测器增益能实现线性,用e代替fe 和fe1。在这个案例中,相应的增益是
另外,需要注意的是ESO的输出是系统输出y 和控制信号u,ESO的输出提供重要信息F(t)=f(x1(t),x2(t),w(t),t).这个允许控制规律(u0 minus;F(t))/b减少(19)式中的plant为级联积分形式:
能被简单的控制通过使u0有跟踪误差和它的衍生物的功能,比如说,一个比例微分控制器。也就是说,控制问题被转化成总干扰的评估和抵抗方面的问题,这极大的简化了问题。这个原则大量成功的运用已经阐述了这种方法的有效性。
IV综合:自抗扰控制器
结合瞬态概要文件,非线性反馈组合和总扰动估计和排斥,ADRC的形式如图2,相应的算法如式(26)。而且,观测器正月如(23)式所示,剩下只有四个调整参数;在此之中,r是对应与加速度极限的放大系数,c是附近单元将被调整的阻尼系数,h1是决定控制回路稳定性的精度系数,并且总是一个多重的采样阶段h的至少四倍,b0是一个系数b在输出大约plusmn;50%范围内的粗略估算。因此,满足控制器成为一个特别应用的主要的调整参数是h1,c充当一个好的参数调节器。
当然,(26)式中的最后一个等式可以被特别地选择作为一个控制参数。给出以下两个选择:
上式分别相当于一个线性和非线性比例微分控制器。实际上,在ESO和反馈中通过用不同的线性或者非线性增益组合,一个人能够很容易发现100种不同的控制器在相同的ADRC框架中。不管这些控制规律中的那一个被选择,我们想指出的是控制器系数不取决于the plant的数学模
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146829],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

