
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
具有反馈的背景分割:基于像素的自适应分割
马丁.霍夫曼, 菲利普.蒂芬巴赫尔, 格哈德.里戈尔
人机通信研究所
德国慕尼黑技术大学
martin.hofmann@tum.de, philtief@gmail.com, rigoll@tum.de
摘要
在本文中,我们提出了一种新的前景分割方法。我们提议的方法遵循一种无参数的背景建模范式,因此,背景是根据最近观察的一系列像素值建模的。前景的判断取决于一个判决阈值。背景的更新是根据一个学习参数。我们把这两个参数全部扩展为动态逐像素状态变量并且为每一个变量引入动态控制器。此外,两个控制器都受控于对动态背景的估计。在我们的实验中,我们提出的基于像素的自适应分割方法优于当前最先进的分割方法。
1. 介绍
在很多图像处理和计算机视觉场合中,一个重要的预处理步骤就是把一个移动的前景物体从基本上是静态的背景中分离出来。主要的应用场合是在移动设备,视频游戏和视觉监视等领域,例如用于检测无人看管的行李,人的计数,人脸识别和步态识别等。
背景分割的一般思想是自动生成一个二元掩膜,将全体像素集合分成前景像素集合和背景像素集合。在最简单情形下,一个静态的背景帧可以和当前帧相比较。具有高偏差值的像素被确定为前景。这种非常简单的方法可能在某些确定的特殊场合下能工作。然而,通常一个空的背景帧是完全不可用的,背景有微妙的运动,或光逐渐改变都使得这种方法不可行。因此,最近大量更先进的背景建模方法被开发出来。
本文中,我们提出另外一种新的建模方法,这种方法建立在几种先前已有的方法基础上以及从控制理论中得到的新想法。我们把这种得到的新方法叫做基于像素的自适应分割方法,因为每个像素的几个参数是在算法运行时自适应调整的。我们在变化检测挑战的平台上评估我们提出的方法。这个数据库集合在广泛的潜在相关应用场合发挥着重要作用,使得这个数据库成为了一个进行性能评估的理想测试平台。在这个挑战中,我们提出了比那些当前先进方法更加优异的性能。
首先,我们在第2章提出了相关的背景分割方法。然后,我们在第3章详细解释基于像素的自适应分割方法。我们的方法使用的一系列参数,在4.1节中进行评价和调整。最好的一组参数会被设置成固定的,并被声明为标准设置。在第4.4节我们把我们的结果和其他背景分割方法的结果进行比较。
2.相关方法
在不久之前,大量的背景建模方法和算法被开发出来。这些算法不在本文讨论范围以内。优秀的调查可以在参考文献[6][7]中找到。然而,我们还是想要提到一种相关的方法,我们的方法就建立在这个基础上:
一个使用的最突出最广泛的方法就是基于高斯混合模型(GMM)的方法。在这里,每个像素被建模成一个加权混合的高斯分布。被判断为背景的像素会用一种迭代更新规则加强高斯混合。这种参数方法有着比较低的记忆复杂度。在SACON中,这个背景模型被定义成无参数方法。在背景模型中的每一个像素被定义成是N个最新图像值的历史。背景图像历史的填充遵循先进先出的策略。相比于这个填充规则,在ViBe中,背景建模也是一个无参数方法,N个背景值是以随机的方式进行更新。不但如此,更新了的像素还可以将它们的当前值渗透到以另一种随机方式进行更新的邻近像素中去。
我们的基于像素分割的方法也可以被归类为一种无参数方法,因为我们也像在SACON中一样,用N个图像历史值作为背景的建模。我们使用了一个和ViBe中相近的随机更新规则。然而,在ViBe中,随机的参数和判决阈值对所有的像素来说都是固定的。相比之下,我们不把这些值作为参数,而是用自适应的状态变量来代替,每个元素的这些变量可以分别动态。
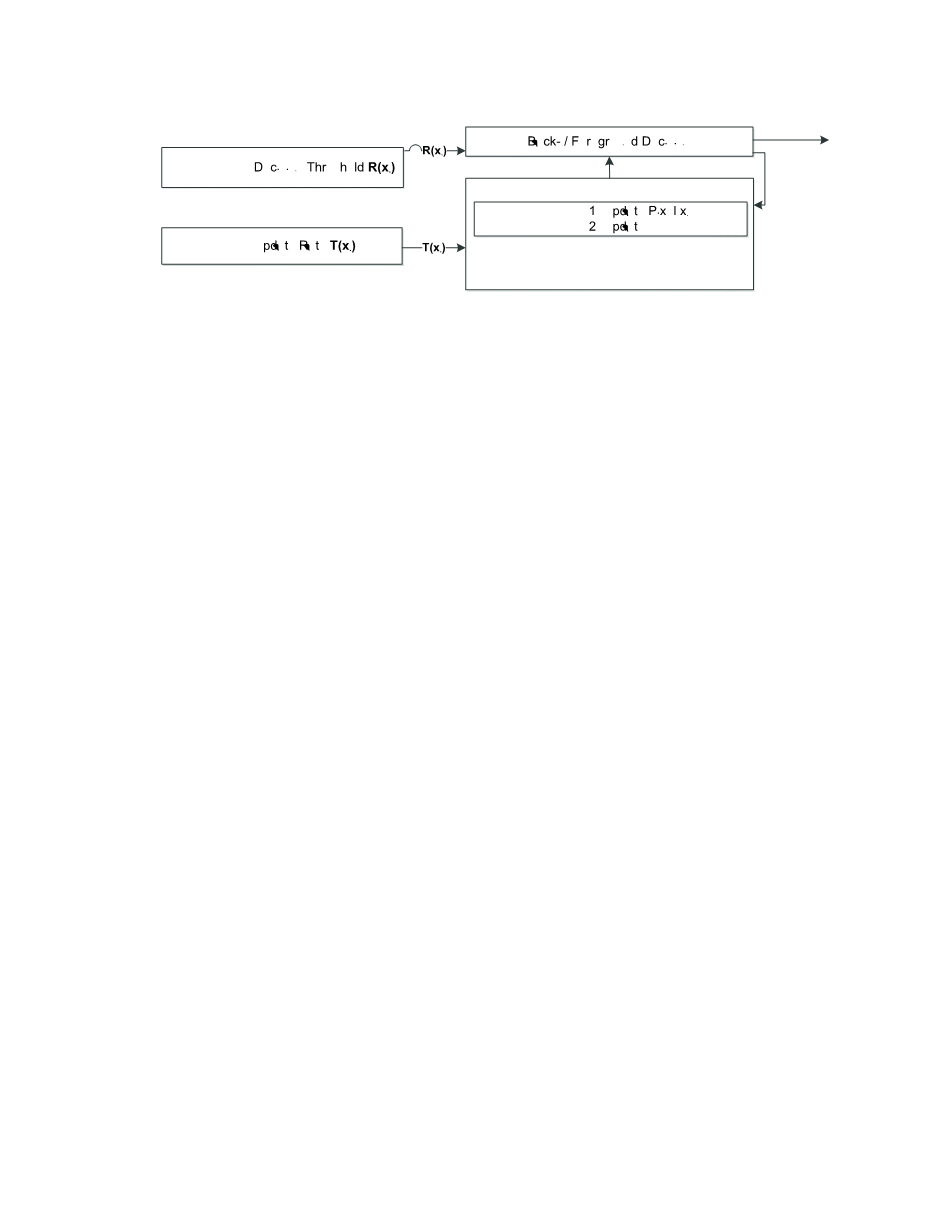
图1:基于像素自适应分割总览
3.基于像素的自适应分割
本节描述了一个遵循无参数范型的基于像素自适应分割方法。因此,每一个像素xi都是由一系列最近观察到的背景值的数组组成。
我们的方法图1中描述的几个部件组成。作为一个核心组成部分,决策模块根据当前图像和一个背景模型B(xi)来判断是否是前景。这个决策是基于每个像素的阈值R(xi)来判断的。此外,背景模型必须随着时间进行更新以保证跟得上整体背景的变化。在我们的模型,这个更新取决于每一个像素的学习参数T(xi)。
现在,我们PABS方法的本质和新奇之处在于我们通过对背景动态的评估,来使每个像素的两个阈值动态变化。
接下来,我们首先描述决策的过程和背景的更新。然后,我们详细介绍决策阈值R(xi)和学习参数T(xi)的动态更新方法。
3.1 分离决策
每一个背景分离算法的目的都是为了得到一个二元判定,即一个像素到底是属于前景还是属于背景。这个决策过程需要输入图像,并通过几种方式把它和背景模型进行比较。在我们的例子中,背景模型B(xi)是由最近观察到的N个像素值组成的数组定义:
B(xi) = {B1(xi), . . . , Bk(xi), . . . , BN(xi)} (1)
一个像素xi,如果它的像素值I(xi)相对于N个背景值的最小值更接近于决策阈值R(xi),那么它就被判定为背景像素。因此,前景分割掩模可以总结为如下公式:
在这里,F= 1意味着是前景像素。由此可以看出,决策所涉及的两个参数:(1)距离阈值R(xi),这个参数对每个像素分别定义,并且可以动态改变;(2)最小数值#min,这是一个固定的全局参数。
3.2 背景模型的更新
更新背景模型B对于解释背景的变化是必要的,如照明变化,阴影和移动的背景对象,例如树木。
由于前景区域不能更新,背景模型只更新当前的背景的像素(F=0)。更新意味着对于一个确定的标签k isin; 1...N(通常随机选择),相应的背景模型值Bk(xi)被当前的像素值I(xi)取代。这使得背景模型向当前像素值学习。这个更新,然而,被执行的概率是p=1/T(xi)。
否则,完全不被执行。因此,参数T(xi)定义的是更新率。T(xi)的值越高,像素值就越不易被更新。
我们也更新(概率也是p=1/T(xi))一个随机选择的邻近像素yi isin; N(xi)。因此,背景模型Bk(yi)在它的邻近的像素被像素当前值V (yi)代替了。这种方法和参考文献[1]中Bk(xi)被当前像素值代替的方法形成鲜明对比。
总而言之,一个像素如果被归类为背景像素,它只是被更新。然而,一个邻近的像素yi
它可能是前景像素,也可能被更新。这就意味着边界线上的前景元素全部会被纳入背景模型中来。利用这种方法,每一个前景像素都将从外边开始在一个确定时间后被背景模型“吃掉”
这个时间取决于更新参数T(xi)。这种特性的优势在于错误判定的前景会很快消失。显然,也包括那些缓慢进入背景的物体。因此,在3.4节我们提出一种自适应动态更新参数T(xi),这样巨大的物体就可以只被“吃掉”一小部分了,同时小的错误物体会被完全“吃掉”。
3.3 决策阈值R(xi)的更新
在一个视频序列号中,这里可能有一些具有高的背景动态的区域(例如,水,风中的树,等)和一些变化极少的区域(例如,墙)。理想情况下,对于高动态区域来说,阈值R(xi)需要增加,以至于不会把这些物体包括进前景。对于一个静态区域,R(xi)的值需要很低,
这样小的偏差才会被判定为前景。因此,阈值R(xi)需要能相应地自适应调整。为应付这种变化,就需要对背景动态进行检测,做法如下:
首先,除了保存最近观察到的像素值进入背景模型数组外,我们还要生成一个关于最小决策距离的数组。不管背景的更新是否实施,当前观察到的最小距离dmin(xi) = mink dist(I(xi), Bk(xi))被写入了数组:Dk(xi) larr; dmin(xi)。因此,一系列最小决策距离被创建。这些值的平均值是对背景动态的一个检测。
举个例子,假设一个完全的静态背景,决策距离平均值将是零。对于更多的动态背景,当前观察的值和前一个值之间将该有一个最小的偏差,所以这个偏差应该更高一些。
通过这个对背景动态的估测,决策阈值可以动态调整如下:
在这里,Rinc/dec, Rscale是固定的参数。这个可以看做状态变量R(xi)的动态控制器。
dmin(xi)作为一个常量,决策阈值R(xi)决定了dmin(xi)* Rscale的结果。因此,一个突然的背景动态的增加只能引发R(xi)的一个慢速增加而不是更高的偏差。
按照上面的提到的方法控制更新速度可以对多样数量的背景动态保持强劲的处理速度。一个高动态背景的示例图片展示了状态变量R(xi)的这种空间分布,如图2所示。在这里,一个较明亮的像素值表明了更高的R(xi)值。
图2:R(xi)空间分布举例
3.4 学习率T(xi)的更新
就像3.2节中所提到的那样,独立的前景状态变量F(xi),最终每一个物体都会凭借学习参数T(xi)而被合并进入背景中。为了缓解这个问题,通常的想法是为T(xi)引入另一个动态控制器,这样当像素是背景的时候背景的学习速度缓慢增加,而像素是前景的时候背景学习速度缓慢减少。这个方法的问题在于,错误分类的前景仅仅是缓慢的进入背景而仍然保留在前景中。
可以推断的是在高动态背景区域的像素很容易错误的被归类为前景物体。因此,控制器调整的强度可以用动态估计值dmin(xi)来自适应调整。我们定义:
这里,Tinc, Tdec是固定的参数。在两种情形下,有完全不同的参数,因为我们推测在大部分情形下,大多数像素是背景。为背景和前景选择独立的参数导致了对T(xi)的平衡管理。
此外,我们为T值设置上下限范围Tlower lt; T lt; Tupper,这样得到的值就不会跑出特定的范围。以上的控制器保证了,一旦处于一个高动态背景中,学习参数T(xi)可以保持常值或者只是轻微的变化。一旦处于高动态背景,错误检测的前景物体将不会保持太长时间,因为更新概率p = 1/T(xi)不会太快到达零。在另一个理想情况完全静态的背景中,前景的划分会非常的固定,因此T(xi)快速变化,用这种方法它保持较少的更新。
图片3描述了在有慢速移动,引人注目的大型前景物体的情况下的更新参数T(xi)。对于和人相一致的像素来说,一个高的T(xi)值意味着低的更新概率。假设背景元素恰好在人的轮廓线之外。这个像素可以通过邻近更新规则来更新前景轮廓边界。因此,一个边界像素可以成为背景像素,轮廓是从外面被“吃掉的”。低的更新概率,将会避免更深的轮廓萎缩,这样主要的轮廓还是被检测为前景。
图3:T(xi)的空间分布举例
3.5 详细计划
实际中,输入的图像I(xi)是一个三通道颜色图像。在我们的方法中,我们把每一个通道独立对待,并且在三个并行线程上运行我们的算法。最后的分离结果F(xi)被分为三种分离操作F R(xi), F G(xi), F B(xi)。所以,输入图像I(xi)是由像素值本身和那个像素点上的梯度值组成的。因此,背景历史的每一个元素Bk(xi) ={Bk v(xi), Bk m(xi)}也是由两个相关值组成。为了算出例2中的距离计算,我们使用如下等式:
这里,I m是从过去观察的帧中得到的平均梯度幅值。因此,前面的分式比梯度幅值更能衡量一个像素值的重要性。
-
评估<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146270],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

